轨道机器人变轨机构的制作方法
- 国知局
- 2025-01-10 13:41:53
本发明涉及轨道式巡检机器人,尤其涉及轨道机器人变轨机构。
背景技术:
1、轨道机器人是一种具有激光扫描功能的机器人,它主要用于大型工厂、食品加工厂电子工厂、车间以及企业以外的工厂,主要用于对车间进行定位控制、重复性加工任务等工况,也可以看作是自动的工作台。
2、但是,国内轨道式机器人普遍都在单轨道上运行,无法进行跨轨操作,在一些环境复杂的车间工作时,单轨道式机器人难以满足使用需求,因此需要一种可变轨的轨道机器人。
技术实现思路
1、鉴于现有技术中存在的上述问题,本发明的主要目的在于提供轨道机器人变轨机构。
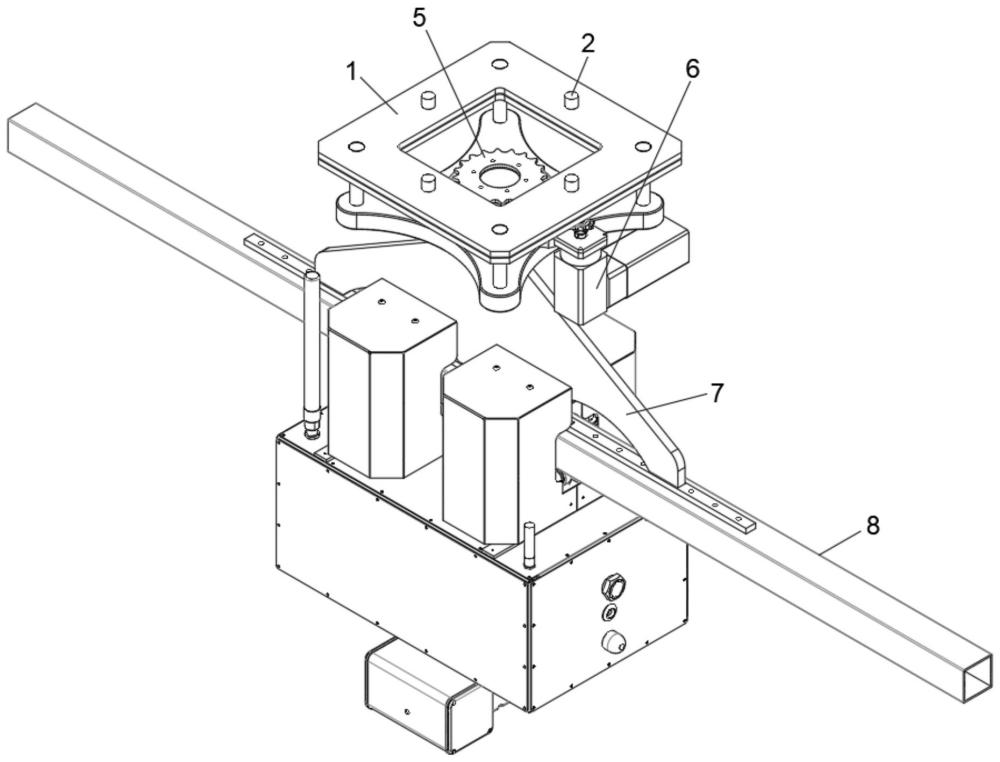
2、本发明的技术方案是这样的:轨道机器人变轨机构,包括轴承座,所述轴承座的外部一侧固定连接有驱动电机,所述驱动电机的输出端安装有减速机,所述轴承座的内部设置有交叉滚子轴承,所述交叉滚子轴承顶部安装一根钢制轴件,所述钢制轴件顶部安装一块链轮由装有减速机的驱动电机通过链条链接使轴件旋转,所述交叉滚子轴承的底部两侧均对称开设有安装孔,所述交叉滚子轴承通过安装孔安装有方管连接件,所述方管连接件的底部设置有方管,所述方管的顶部放置有id卡。
3、作为一种优选的实施方式,所述轴承座的顶部两侧均对称固定连接有支撑柱,所述支撑柱的顶部固定连接有顶板。
4、作为一种优选的实施方式,所述方管连接件的外部为三角型结构,所述方管连接件的底部两侧均开设有弧形槽。
5、作为一种优选的实施方式,所述方管为中空结构,所述方管连接件的外部两侧与外部轨道机器人相连接。
6、与现有技术相比,本发明的优点和积极效果在于:
7、本发明中,驱动电机直连减速机,减速机的输出轴通过平键与链轮相连,并通过链条将动力传输到交叉滚子轴承内的轴件,再驱使方管旋转,方管中间放置有id卡,当轨道机器人要进行变轨操作时,机器人运动到旋转方管中间,当读取id卡后停止运转,然后变轨驱动电机电机开始运作,当轨道旋转到与另一轨道配对的角度后机器人再进行运动,从而实现轨道机器人能进行变轨操作,可以实现多条轨道上共用一台或多台机器人交叉运行的目的,较传统装置极大地提高了作业质量与使用效率。
技术特征:1.轨道机器人变轨机构,包括轴承座(3),其特征在于:所述轴承座(3)的外部一侧固定连接有驱动电机(6),所述驱动电机(6)的输出端安装有减速机,所述轴承座(3)的内部设置有交叉滚子轴承(4),所述交叉滚子轴承(4)顶部安装一根钢制轴件,所述钢制轴件顶部安装一块链轮(5)由装有减速机的驱动电机(6)通过链条链接使轴件旋转,所述交叉滚子轴承(4)的底部两侧均对称开设有安装孔(9),所述交叉滚子轴承(4)通过安装孔(9)安装有方管连接件(7),所述方管连接件(7)的底部设置有方管(8),所述方管(8)的顶部放置有id卡。
2.根据权利要求1所述的轨道机器人变轨机构,其特征在于:所述轴承座(3)的顶部两侧均对称固定连接有支撑柱(2),所述支撑柱(2)的顶部固定连接有顶板(1)。
3.根据权利要求1所述的轨道机器人变轨机构,其特征在于:所述方管连接件(7)的外部为三角型结构,所述方管连接件(7)的底部两侧均开设有弧形槽。
4.根据权利要求1所述的轨道机器人变轨机构,其特征在于:所述方管(8)为中空结构,所述方管连接件(7)的外部两侧与外部轨道机器人相连接。
技术总结本发明涉及轨道机器人变轨机构,包括轴承座,轴承座的外部一侧固定连接有驱动电机,驱动电机的输出端安装有减速机,轴承座的内部设置有交叉滚子轴承,交叉滚子轴承顶部安装一根钢制轴件,钢制轴件顶部安装一块链轮由装有减速机的驱动电机通过链条链接使轴件旋转,交叉滚子轴承的底部两侧均对称开设有安装孔,交叉滚子轴承通过安装孔安装有方管连接件,方管连接件的底部设置有方管,方管的顶部放置有ID卡。本发明的有益效果在于,解决了现有技术中的轨道式机器人普遍都在单轨道上运行,无法进行跨轨操作,在一些环境复杂的车间工作时,单轨道式机器人难以满足使用需求,因此需要一种可变轨的轨道机器人的问题。技术研发人员:帅毓廷,卢静,王军,于军琪受保护的技术使用者:陕西固博机器人科技有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354764.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表