一种重型商用车电子后视镜CMS工作状态的控制方法及系统与流程
- 国知局
- 2025-01-17 12:49:05
本发明涉及电子后视镜,尤其是涉及一种重型商用车电子后视镜cms工作状态的控制方法及系统。
背景技术:
1、现有市面上的商用车普遍采用机械后视镜,包括左右ii类视野(主后视镜)、左右iv类视野(广角后视镜)、v类(补盲)、vi类视野(前视野),但是机械后视镜的视野受限:传统机械后视镜的视野范围有限,存在盲区,驾驶员无法全面观察到车辆周围的情况,存在一定的安全隐患;受天气和光照影响:在恶劣天气或光照条件下,如雨天、雾天或强烈光照条件下,传统机械后视镜的清晰度会受到影响,导致驾驶员无法准确判断后方车辆情况;调节繁琐:传统机械后视镜需要驾驶员手动调节角度,以适应不同驾驶场景和驾驶员身高,这种调节过程较为繁琐,且不同场景下可能需要反复调整,当使用电子后视镜代替物理镜时,司机希望能比较快速的看到画面,但是呈现出的画面时间比较长,待机和睡眠,反应周期长,导致车辆能耗的提高。
技术实现思路
1、鉴于以上问题,本发明提供了一种重型商用车电子后视镜cms工作状态的控制方法及系统,不仅能够保证电子后视镜能够快速的呈现画面,而且根据车辆不同的工况,能够快速的进行反应,降低能耗。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:一种重型商用车电子后视镜cms工作状态的控制方法,所述方法包括:
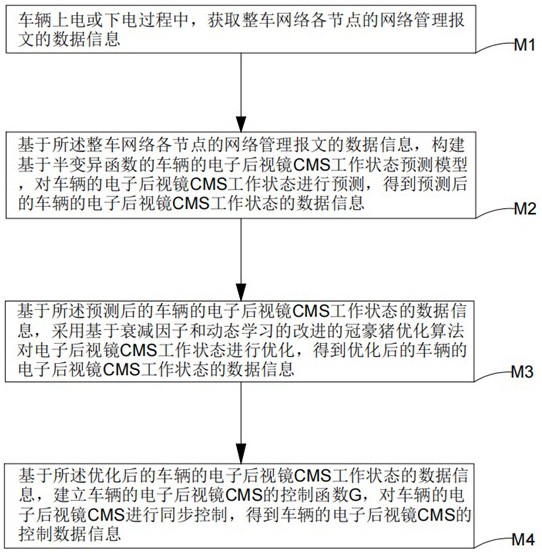
3、m1.车辆上电或下电过程中,获取整车网路各节点的网络管理报文的数据信息;
4、m2.基于所述整车网络各节点的网络管理报文的数据信息,构建基于半变异函数的车辆的电子后视镜cms工作状态预测模型,对车辆的电子后视镜cms工作状态进行预测,得到预测后的车辆的电子后视镜cms工作状态的数据信息;
5、m3.基于所述预测后的车辆的电子后视镜cms工作状态的数据信息,采用基于衰减因子和动态学习的改进的冠豪猪优化算法对电子后视镜cms工作状态进行优化,得到优化后的车辆的电子后视镜cms工作状态的数据信息;
6、m4.基于所述优化后的车辆的电子后视镜cms工作状态的数据信息,建立车辆的电子后视镜cms的控制函数g,对车辆的电子后视镜cms进行同步控制,得到车辆的电子后视镜cms的控制数据信息。
7、进一步的,在步骤m2中,所述构建基于半变异函数的车辆的电子后视镜cms工作状态预测模型,对车辆的电子后视镜cms工作状态进行预测包括:
8、m21.基于所述整车网络各节点的网络管理报文的数据信息,建立车辆的网络管理报文的半变异函数q,
9、
10、其中,x为整车网络各节点的网络管理报文的数据信息,α1、α2和α3为整车网络各节点的关系因子,对不同时刻的网络管理报文的连续变化相关性进行表征,得到整车网络各节点的网络管理报文的连续变化相关性的数据信息;
11、m22.基于所述整车网络各节点的网络管理报文的连续变化相关性的数据信息,建立车辆的电子后视镜cms工作状态的预测函数w,
12、其中,y为整车网络各节点的网络管理报文的连续变化相关性的数据信息,β1、β2和β3为车辆的电子后视镜的cms工作状态的预测因子;
13、m23.基于所述车辆的电子后视镜cms工作状态的预测函数w,对车辆的电子后视镜cms工作状态进行预测,得到预测后的车辆的电子后视镜cms工作状态的数据信息。
14、进一步的,所述整车网络各节点的关系因子α1、α2和α3的约束函数f为,
15、
16、其中,约束函数f的取值范围为(0,1)。
17、进一步的,所述车辆的电子后视镜的cms工作状态的预测因子β1、β2和β3为,
18、
19、其中,y为整车网络各节点的网络管理报文的连续变化相关性的数据信息。
20、进一步的,所述车辆的电子后视镜的cms工作状态的预测因子β1、β2和β3的约束条件为,
21、
22、进一步的,在步骤m3中,所述采用基于衰减因子和动态学习的改进的冠豪猪优化算法对电子后视镜cms工作状态进行优化包括:
23、m31.基于所述预测后的车辆的电子后视镜cms工作状态的数据信息,对冠豪猪种群进行初始化,确定种群参数和最大迭代次数l,得到初始化后的冠豪猪种群的数据信息;
24、m32.基于所述初始化后的冠豪猪种群的数据信息,建立基于衰减因子的冠豪猪种群个体的适应度函数r,
25、
26、其中,z为初始化后的冠豪猪种群的数据信息,δ1、δ2和δ3为冠豪猪种群个体的衰减因子,对种群个体的适应度值进行推算,得到种群个体的适应度值的数据信息;
27、m33.基于所述种群个体的适应度值的数据信息,建立基于动态学习因子的目标优化函数u,
28、
29、其中,r为种群个体的适应度值的数据信息,γ1、γ2和γ3为动态学习因子,对电子后视镜cms工作状态进行优化,得到优化后的车辆的电子后视镜cms工作状态的数据信息。
30、进一步的,所述动态学习因子γ1、γ2和γ3为,
31、
32、其中,r为种群个体的适应度值的数据信息。
33、进一步的,所述冠豪猪种群个体的衰减因子δ1、δ2和δ3的约束条件为,
34、
35、进一步的,所述车辆的电子后视镜cms的控制函数g为,
36、
37、其中,h为优化后的车辆的电子后视镜cms工作状态的数据信息,η1、η2和η3为车辆的电子后视镜cms的控制因子。
38、为了实现上述目的及其他相关目的,本发明还提供了一种重型商用车电子后视镜cms工作状态的控制系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述的重型商用车电子后视镜cms工作状态的控制方法的步骤。
39、本发明具有以下积极效果:
40、1.本发明通过构建基于半变异函数的车辆的电子后视镜cms工作状态预测模型,对车辆的电子后视镜cms工作状态进行预测,并结合采用基于衰减因子和动态学习的改进的冠豪猪优化算法对电子后视镜cms工作状态进行优化,不仅能够对车辆的电子后视镜cms的工作状态进行精确的预测,从而保证根据不同车辆的状态来对车辆的电子后视镜cms进行快速的调整,而且调整过程中,无需人工参与,智能化程度高,提升用户的使用体验。
41、2.本发明通过建立车辆的电子后视镜cms的控制函数g,对车辆的电子后视镜cms进行同步控制,不仅能够保证电子后视镜能够快速的呈现画面,而且根据车辆不同的工况,能够快速的进行反应,降低能耗。
技术特征:1.一种重型商用车电子后视镜cms工作状态的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于,在步骤m2中,所述构建基于半变异函数的车辆的电子后视镜cms工作状态预测模型,对车辆的电子后视镜cms工作状态进行预测包括:
3.根据权利要求2所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于:所述整车网络各节点的关系因子α1、α2和α3的约束函数f为,
4.根据权利要求2所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于:所述车辆的电子后视镜的cms工作状态的预测因子β1、β2和β3为,
5.根据权利要求4所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于:所述车辆的电子后视镜的cms工作状态的预测因子β1、β2和β3的约束条件为,
6.根据权利要求1所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于,在步骤m3中,所述采用基于衰减因子和动态学习的改进的冠豪猪优化算法对电子后视镜cms工作状态进行优化包括:
7.根据权利要求6所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于:所述动态学习因子γ1、γ2和γ3为,
8.根据权利要求6所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于:所述冠豪猪种群个体的衰减因子δ1、δ2和δ3的约束条件为,
9.根据权利要求1所述的重型商用车电子后视镜cms工作状态的控制方法,其特征在于:所述车辆的电子后视镜cms的控制函数g为,
10.一种重型商用车电子后视镜cms工作状态的控制系统,包括计算机设备,其特征在于,该计算机设备被编程或配置以执行权利要求1~9中任意一项所述的重型商用车电子后视镜cms工作状态的控制方法的步骤。
技术总结本发明涉及一种重型商用车电子后视镜CMS工作状态的控制方法及系统,所述方法包括:M1.车辆上电或下电过程中,获取整车网路各节点的网络管理报文的数据信息;M2.基于所述整车网络各节点的网络管理报文的数据信息,构建基于半变异函数的车辆的电子后视镜CMS工作状态预测模型,对车辆的电子后视镜CMS工作状态进行预测,得到预测后的车辆的电子后视镜CMS工作状态的数据信息,并采用基于衰减因子和动态学习的改进的冠豪猪优化算法对电子后视镜CMS工作状态进行优化,得到优化后的车辆的电子后视镜CMS工作状态的数据信息。本发明不仅能够保证电子后视镜能够快速的呈现画面,而且根据车辆不同的工况,能够快速的进行反应,降低能耗。技术研发人员:窦明佳,吴明瞭,李波,吴海峰,唐荆峰,朱海楠受保护的技术使用者:广州海珀特科技有限公司技术研发日:技术公布日:2025/1/13本文地址:https://www.jishuxx.com/zhuanli/20250117/355574.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表