一种移动式红外测温结构及其方法与流程
- 国知局
- 2025-01-17 12:59:39
本发明涉及移动测温装置,具体涉及一种移动式红外测温结构及其方法。
背景技术:
1、当前移动式红外测温结构,例如红外测温机器人广泛应用于生产生活当中,使用场景例如具多个开关柜的变电站,用于对开关柜进行温度检测,同时红外测温探头长时间服役后容易损坏,因此需要人工定期更换和保养;
2、如公开号为cn103550883a的专利公开了巡检机器人、气体探测装置、红外测温装置、灭火装置及主控计算机。巡检机器人置于变电站内,巡检机器人的工作场所地面画有巡检路线,地面关键点安装有用于定位的若干射频卡。其有益效果是:基于巡检路线标识和导航装置进行自动巡检;通过气体探测装置对变电站生产场所内早期火灾特征气体浓度进行实时监测,对浓度超限情况进行分级预警;通过红外测温装置对生产设备进行红外温度图像采集,对设备超温情况进行分级报警,并对故障点进行定位;采用灭火装置对突发火灾进行快速灭火,控制初期火灾蔓延,为救援工作赢得了时间。这对早期火灾加强了防范和扑救,更有效地改善了变电站的消防安全状况。
3、又如公开号为cn109176456a的专利公开了一种多功能巡检机器人,包括有车体和机械臂,机械臂设有与车体连接的第一机械臂,第一机械臂与车体连接一端设有连接件,连接件与车体设有的连接轴转动连接;第一机械臂转动连接有第二机械臂,第二机械臂转动连接有第三机械臂,第三机械臂设有固定臂和转动臂,固定臂与第二机械臂转动连接,固定臂和转动臂转动连接,转动臂能够在第三机械臂设有的驱动装置的作用下相对于固定臂进行转动;转动臂一端设有检测仪,检测仪设有热成像装置和摄像装置,能够有效的实现对被检设备的检测,同时机器人能够适应处于不同高度、不同位置的被检设备,提高机器人在使用过程中的适应性和检测过程的精确性。
4、但是,该专利申请无法实现在红外测温装置发生损坏时或切换其他类型红外测温装置时自动完成更换。
5、基于此,本发明设计了一种移动式红外测温结构及其方法以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种移动式红外测温结构及其方法。
2、为实现以上目的,本发明通过以下技术方案予以实现:
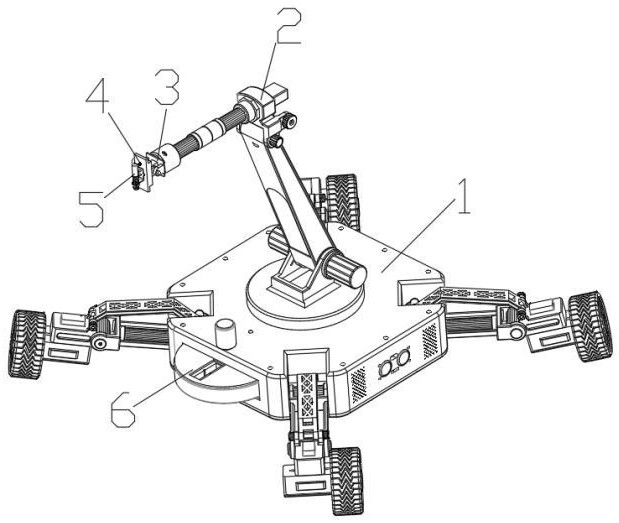
3、一种移动式红外测温结构,包括移动机器人和机械臂,还包括红外检测组件,所述机械臂固定安装于移动机器人上,机械臂的输出端安装有用于调节角度的角度调节组件,所述角度调节组件的调节端安装有用于红外检测组件拆卸连接的连接驱动组件;
4、所述连接驱动组件包括驱动组件、快拆组件和电连接组件,所述驱动组件安装于角度调节组件的调节端,快拆组件、电连接组件均与驱动组件连接,所述快拆组件、电连接组件均配合红外检测组件拆卸连接使用;
5、还包括用于配合红外检测组件存储使用的收纳组件,所述收纳组件安装于移动机器人上。
6、更进一步的,所述移动机器人包括移动机器人本体和开口,所述开口开设于于移动机器人本体的前侧壁,机械臂固定安装于移动机器人本体的上端面,收纳组件安装于移动机器人本体的前侧并与开口连接。
7、更进一步的,所述角度调节组件包括电机一、铰接座和安装座,所述安装座固定安装于电机一的输出端,电机一固定安装于铰接座的侧壁,电机一的输出端与安装座固定连接,铰接座与安装座转动连接,驱动组件安装于安装座上。
8、更进一步的,所述驱动组件包括推拉式电磁铁、连接板、第一推杆和第二推杆,所述推拉式电磁铁固定安装于安装座的后端面,推拉式电磁铁的输出端与连接板固定连接,所述第一推杆有两个,第一推杆的一端与连接板固定连接,第一推杆的另一端与快拆组件连接,所述第二推杆的一端与连接板固定连接,第二推杆的另一端与电连接组件连接,所述安装座的前后侧壁贯穿开设有配合三个配合两个第一推杆和第二推杆穿过使用的插孔。
9、更进一步的,所述快拆组件有两组,两组快拆组件均与安装座连接,两组快拆组件分别与两个第一推杆的另一端连接。
10、更进一步的,所述快拆组件包括锥形推块、滑套、球槽和钢珠,所述锥形推块固定安装于第一推杆的另一端,锥形推块与红外检测组件配合使用,所述滑套固定安装于安装座前后侧开设的配合第一推杆穿过使用的插孔的内壁上,所述球槽开设于滑套上,钢珠限位滑动安装于球槽的内端,所述钢珠与红外检测组件配合使用,钢珠与锥形推块的锥面配合贴合滑动。
11、更进一步的,所述电连接组件包括插头和弹簧,所述插头设于安装座前后侧壁开设的配合第二推杆穿过的插孔内,插头与第二推杆的另一端限位滑动连接,弹簧的一端与插头固定连接,弹簧的另一端与第二推杆的固定连接,插头与红外检测组件配合使用。
12、更进一步的,所述红外检测组件包括红外探头本体、插座、l形连接架、导向块、连接套和环形卡槽;
13、所述插座固定安装于红外探头本体的外壁,所述插座与插头配合插拔电连接使用,l形连接架固定安装于红外探头本体的外壁,导向块固定安装于l形连接架的侧壁上,导向块与收纳组件配合使用,所述连接套有两个且均与l形连接架固定连接,所述两个连接套的内壁分别配合滑套滑动连接使用,所述连接套内壁开设有配合钢珠卡接使用的环形卡槽,所述l形连接架的后侧壁配合安装座的前侧壁抵触连接使用。
14、更进一步的,所述收纳组件包括电机二、封盖、取物口、储料转盘、储料槽和引导槽;
15、所述电机二固定安装于移动机器人本体的上端面前侧,封盖固定安装于开口的内顶部,所述电机二的输出端穿过移动机器人本体的上端以及封盖,电机二的输出端与储料转盘的上端面中心固定连接,所述封盖的上下端面贯穿开设有配合安装座穿过的取物口,所述储料转盘的上端面等间距开设有配合红外探头本体储存使用的储料槽,所述储料槽的内壁开设有配合导向块限位滑动使用的引导槽。
16、为了更好地实现本发明的目的,本发明还提供了一种主题,包括以下步骤:
17、步骤一,当需要对位于储存于收纳组件中的红外检测组件进行替换时,启动机械臂,机械臂调节其输出端的位置至封盖上的取物口处;
18、步骤二,通过启动电机一,电机一带动安装座绕铰接座转动,使得安装座的前侧壁与取物口对齐;
19、步骤三,再次启动机械臂,机械臂驱动安装座穿过取物口,直到安装座的前侧壁与储料转盘抵触,此时启动推拉式电磁铁,推拉式电磁铁驱动连接板运动,连接板带动两个第一推杆和第二推杆运动,第二推杆带动插头运动,当插头与插座插接时,第二推杆继续运动,此时第二推杆挤压弹簧,弹簧弹力挤压插头,同时第一推杆运动带动锥形推块运动,锥形推块的锥面与钢珠贴合并推动钢珠在其上以及球槽内滑动,钢珠挤压至环形卡槽内并与其内壁抵触卡接,此时l形连接架与安装座的前侧壁抵触;
20、步骤四,启动机械臂,使得安装座从取物口内脱离,安装座将红外检测组件整体带出储料槽,红外检测组件的自动安装完成;
21、步骤五,当需要切换储存于储料槽内的红外检测组件时,通过电机二驱动储料转盘转动,使得另一储料槽转动至与取物口对齐处。
22、本发明相较于现有技术,其有益效果为:1、通过移动机器人实现自由移动,通过机械臂实现驱动角度调节组件上连接的红外检测组件任意位置探测,通过角度调节组件实现调节红外检测组件的探测角度,通过驱动组件驱动快拆组件和电连接组件,实现储存于收纳组件中的红外检测组件与角度调节组件的拆卸连接,从而实现了对红外检测组件的自动更换。
23、2、本发明使用时,通过电机二驱动储料转盘转动,实现储存于储料槽内的红外探头本体的自动切换,适用于不同类型的红外探头本体的切换,从而根据需求自动更换不同类型的红外探头本体。
本文地址:https://www.jishuxx.com/zhuanli/20250117/355914.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表