水平运输机器人自动实现冷箱调箱门的路径规划方法与流程
- 国知局
- 2025-01-17 13:02:49
本发明属于集装箱码头智能设备,具体涉及一种水平运输机器人自动实现冷箱调箱门的路径规划方法。
背景技术:
1、冷藏集装箱(reefer container)是指一种有良好隔热,且能维持一定低温要求,适用于各类易腐食品的运送、贮存的特殊集装箱。冷藏集装箱箱体两侧一边为箱门,另一边为冷箱电机,箱门侧与普通集装箱一致,均为装卸货物的出入口,另一侧电机则是用来在冷箱堆场以及在船舶上连接电源制冷以及观测冷箱状态。在集装箱船舶上,每一个装船贝位普遍只有一侧有冷箱电源,所以对装船冷箱有箱门朝向的要求。
2、近年来,集装箱运输量不断增长,各类货物的运输量都在攀升,其中对于储存温度有特别要求的货物,如水果、肉类,药品等更是逐年攀升,因此目前集装箱码头都面临着庞大的冷箱集疏运压力。此外,无论是在传统人工集装箱码头还是在自动化集装箱码头,都面临着集港冷箱电机朝向与装船冷箱电机朝向需求方向不同的情况以及当场存冷箱压力过大时需要进行的调转冷箱箱门朝向,集中堆码的场地整理作业需求。因此需要对在场冷箱的电机(箱门)朝向进行调转,这种作业工况称为冷箱调箱门作业。
3、传统的冷箱调箱门方式,是通过由有头集卡车在场地收箱后,前往流机作业场地使用正面吊调转箱门朝向后再返回场地送箱。该方法效率低,需要人工参与,人工成本高,无法做到自动化作业,不符合自动化码头的生产需要。
技术实现思路
1、本发明的目的在于提供一种水平运输机器人自动实现冷箱调箱门的路径规划方法,以解决现有技术中存在的问题。
2、为实现上述目的,本发明提供如下技术方案:一种水平运输机器人自动实现冷箱调箱门的路径规划方法,包括以下步骤:
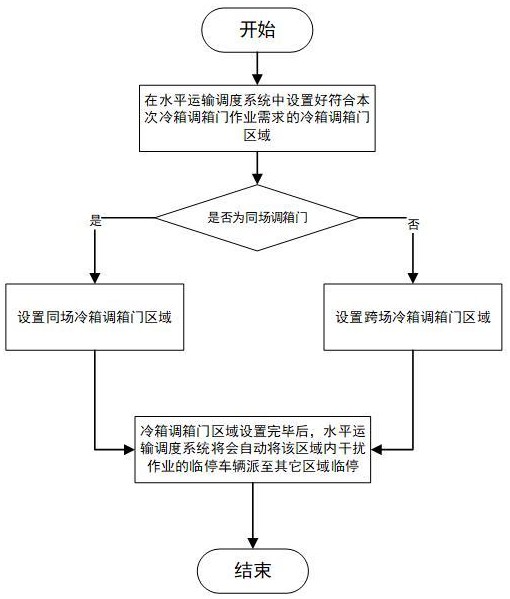
3、s1: 在水平运输调度系统中设置好符合本次冷箱调箱门作业需求的冷箱调箱门区域;
4、s2:将tos中的冷箱调箱门指令派发给参与冷箱调箱门作业的art;
5、s3:art收到指令后水平运输调度系统将自动规划合理的冷箱调箱门路径并派发给art执行;
6、在冷箱调箱门作业中,art需要逆行方向送箱以达到箱门调转的目的,在逆行状态下,art仍能与armg(自动化轨道式龙门起重机)正常执行对位-锁车-作业的流程。
7、优选地,所述s1包括以下步骤:
8、s11.判断其是同场调箱门还是跨场调箱门,跨场冷箱调箱门需要锁定跨场地之间的区域及其自动化车道;
9、s12.冷箱调箱门区域设置完毕后,水平运输调度系统将会自动将该区域内干扰作业的临停车辆派至其它区域临停。
10、优选地,所述s3包括以下步骤:s31.判断其是同场调箱门还是跨场调箱门,在跨场冷箱调箱门作业中,水平运输调度系统将规划回字形路线;在同场冷箱调箱门作业中,水平运输调度系统将规划8字形路线;
11、s32.冷箱调箱门指令完成后,art执行完调头路径后自动临停,冷箱调箱门结束。
12、优选地,所述冷箱调箱门区域分为同场调箱门和跨场调箱门两种类型,跨场冷箱调箱门需要所跨场地之间的区域及其自动化车道;同场冷箱调箱门则需要作业场地及其相邻的3块场地及其自动化车道。
13、优选地,在冷箱调箱门作业区划定后,此区域将自动禁止不带有冷箱调箱门任务的art生成前往该区域的路径。
14、优选地,在冷箱调箱门作业区划定后,该区域内若存在影响冷箱调箱门的临停车辆,水平运输调度系统将自动给这些车辆下发前往其他空闲区域临停的路径。
15、与现有技术中的方法相比,本发明的有益效果如下:
16、该方法可以提高堆场水平布置的自动化集装箱码头的自动化作业程度,降低人力成本,提高作业效率,解决日益增长的冷箱作业压力。
技术特征:1.一种水平运输机器人自动实现冷箱调箱门的路径规划方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的水平运输机器人自动实现冷箱调箱门的路径规划方法,其特征在于:所述s1包括以下步骤:
3.根据权利要求1所述的水平运输机器人自动实现冷箱调箱门的路径规划方法,其特征在于:所述s3包括以下步骤:s31.判断其是同场调箱门还是跨场调箱门,在跨场冷箱调箱门作业中,水平运输调度系统将规划回字形路线;在同场冷箱调箱门作业中,水平运输调度系统将规划8字形路线;
4.根据权利要求1所述的水平运输机器人自动实现冷箱调箱门的路径规划方法,其特征在于:所述冷箱调箱门区域分为同场调箱门和跨场调箱门两种类型,跨场冷箱调箱门需要所跨场地之间的区域及其自动化车道;同场冷箱调箱门则需要作业场地及其相邻的3块场地及其自动化车道。
5.根据权利要求4所述的水平运输机器人自动实现冷箱调箱门的路径规划方法,其特征在于:在冷箱调箱门作业区划定后,此区域将自动禁止不带有冷箱调箱门任务的art生成前往该区域的路径。
6.根据权利要求4所述的水平运输机器人自动实现冷箱调箱门的路径规划方法,其特征在于:在冷箱调箱门作业区划定后,该区域内若存在影响冷箱调箱门的临停车辆,水平运输调度系统将自动给这些车辆下发前往其他空闲区域临停的路径。
技术总结本发明属于集装箱码头智能设备技术领域,具体涉及一种水平运输机器人自动实现冷箱调箱门的路径规划方法,包括以下步骤:S1:在水平运输调度系统中设置好符合本次冷箱调箱门作业需求的冷箱调箱门区域;S2:将TOS中的冷箱调箱门指令派发给参与冷箱调箱门作业的ART;S3:ART收到指令后水平运输调度系统将自动规划合理的冷箱调箱门路径并派发给ART执行。该方法可以提高堆场水平布置的自动化集装箱码头的自动化作业程度,降低人力成本,提高作业效率,解决日益增长的冷箱作业压力。技术研发人员:冯淼,霍晨晨,刘喜旺,张昊,张嘉琦,刘鑫,欧阳志昊,田雨,管考举,彭湃,王芳,蒋天丽受保护的技术使用者:天津港第二集装箱码头有限公司技术研发日:技术公布日:2025/1/13本文地址:https://www.jishuxx.com/zhuanli/20250117/355998.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。