-
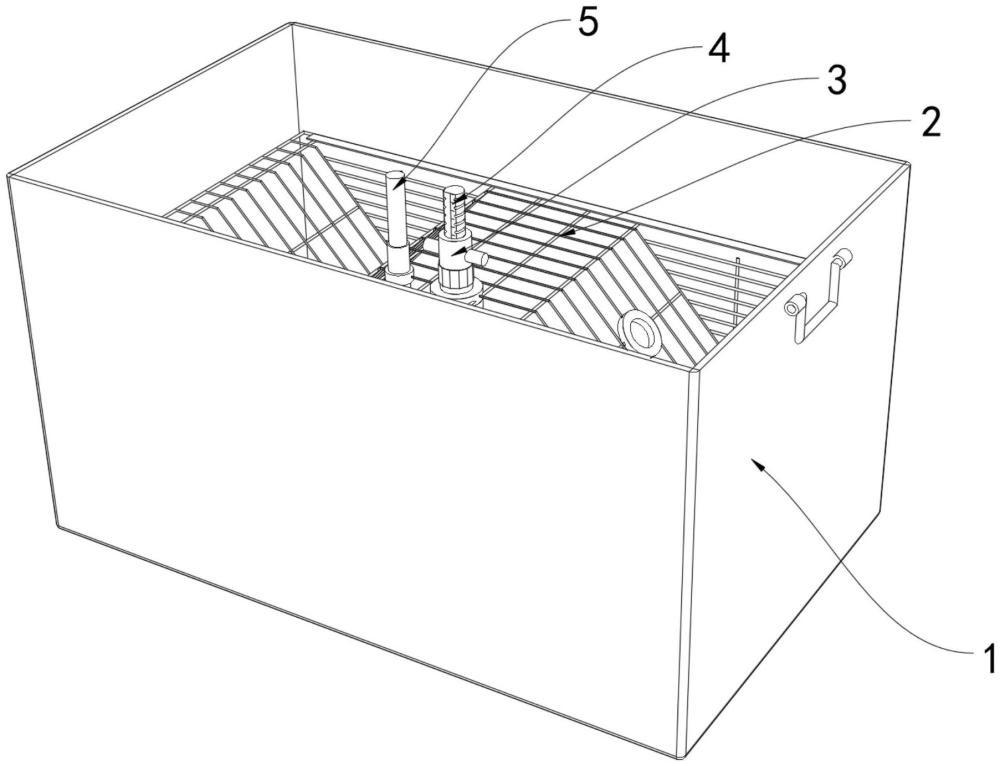
组合式可精控调节高度的双足鼠模型训练装置
本发明涉及科研实验动物模型造模,尤其涉及组合式可精控调节高度的双足鼠模型训练装置。背景技术:1、在地球上生活的众多物种中,双足直立行走是人类进化的特有标志之一,不仅对人类文明和生活方式产生了深远影响,......
-
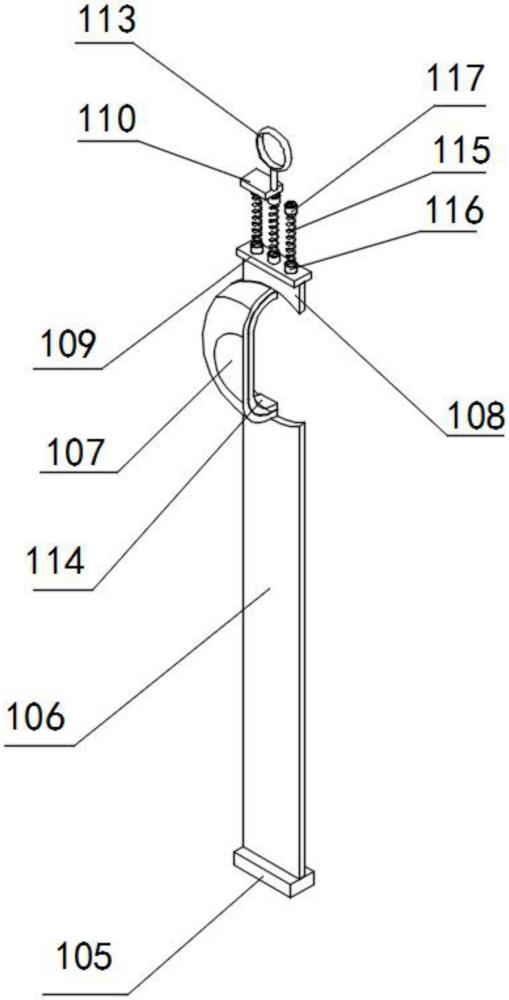
一种双足机器人腿部保护结构
本技术涉及双足机器人,尤其涉及一种双足机器人腿部保护结构。背景技术:1、双足机器人是一种仿生类型的机器人,能够实现机器人的双足行走和相关动作。传统的双足机器人,通常会在上身与大腿之间、大腿与小腿之间、......
-
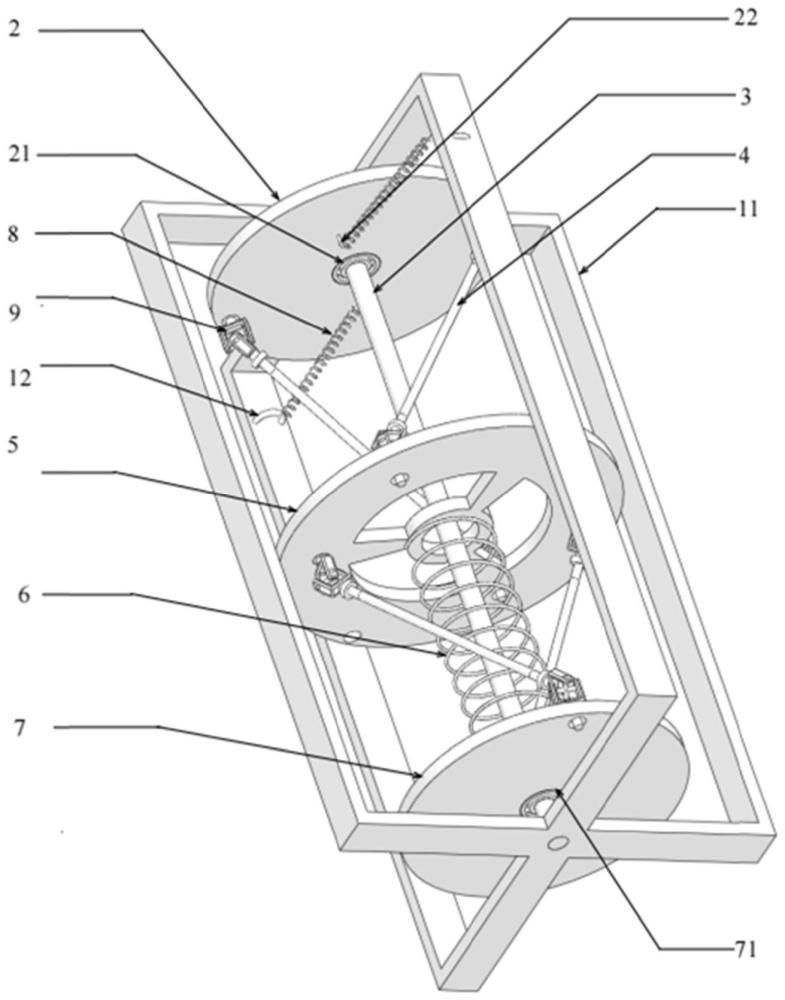
一种基于双足装置的非线性准零刚度振动俘能器及设计方法
本发明涉及振动能量收集,具体涉及一种基于双足装置的非线性准零刚度振动俘能器及设计方法。背景技术:1、振动存在于人类社会的方方面面,振动在带来许多便利的同时,也产生了许多危害:不仅可能会使得轨道交通、飞......
-
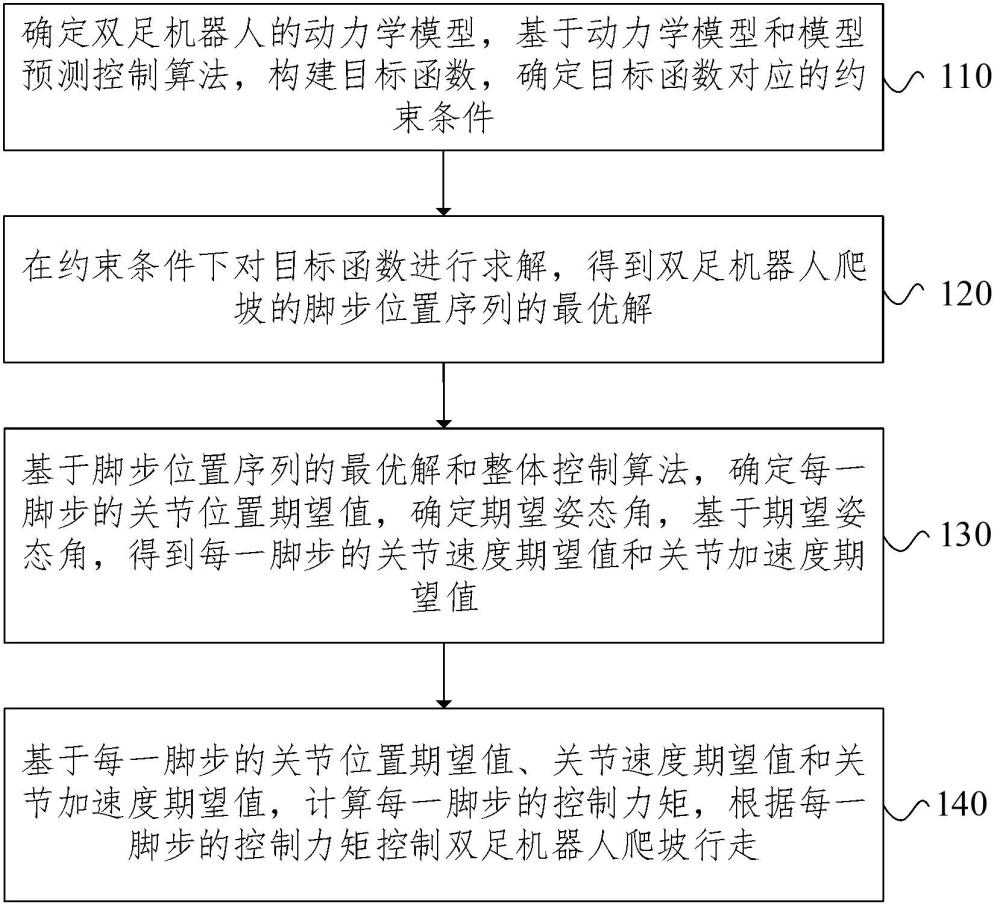
双足机器人爬坡方法、装置、电子设备和存储介质
本发明涉及机器人,尤其涉及一种双足机器人爬坡方法、装置、电子设备和存储介质。背景技术:1、双足机器人的研究和应用已经成为机器人领域中备受关注的一个方向。双足机器人在实际应用中经常需要面对多样化的地形,......
-
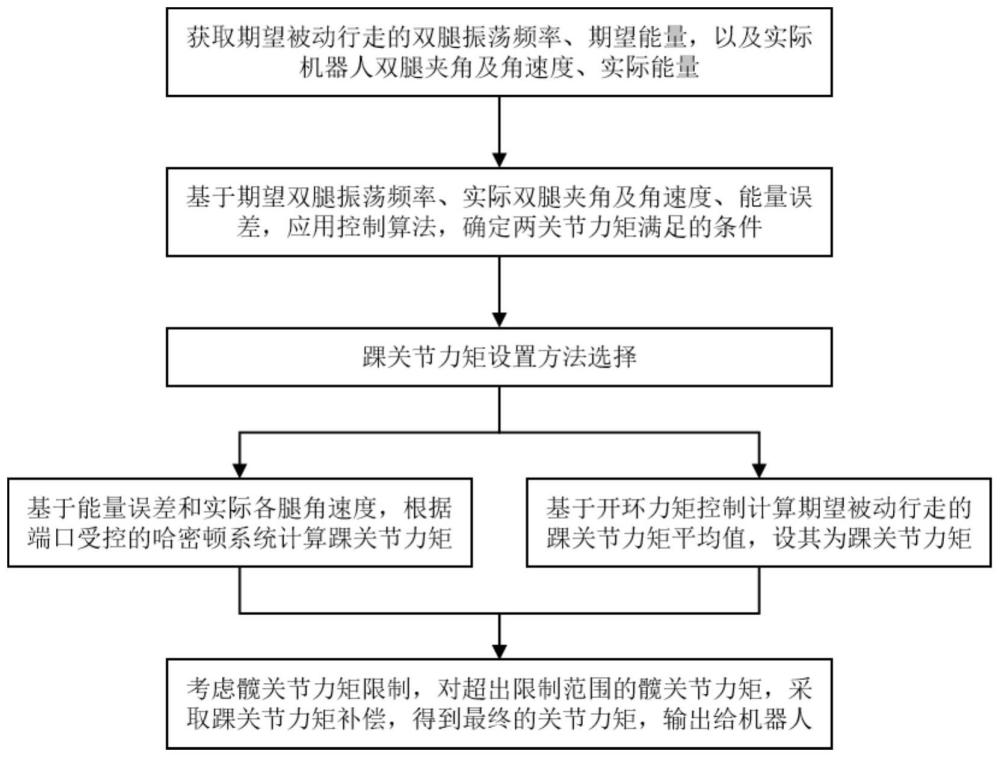
一种基于目标动力学的双足机器人被动行走控制方法
本发明涉及机器人被动行走,尤其涉及一种基于目标动力学的双足机器人被动行走控制方法。背景技术:1、双足机器人作为一种仿人机器人,要实现与人类相似的行走步态是一大关键问题,其中,步态的稳定性和能效是双足机......
技术新讯 > 双足 > 列表
 2024-09-14
2024-09-14精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -
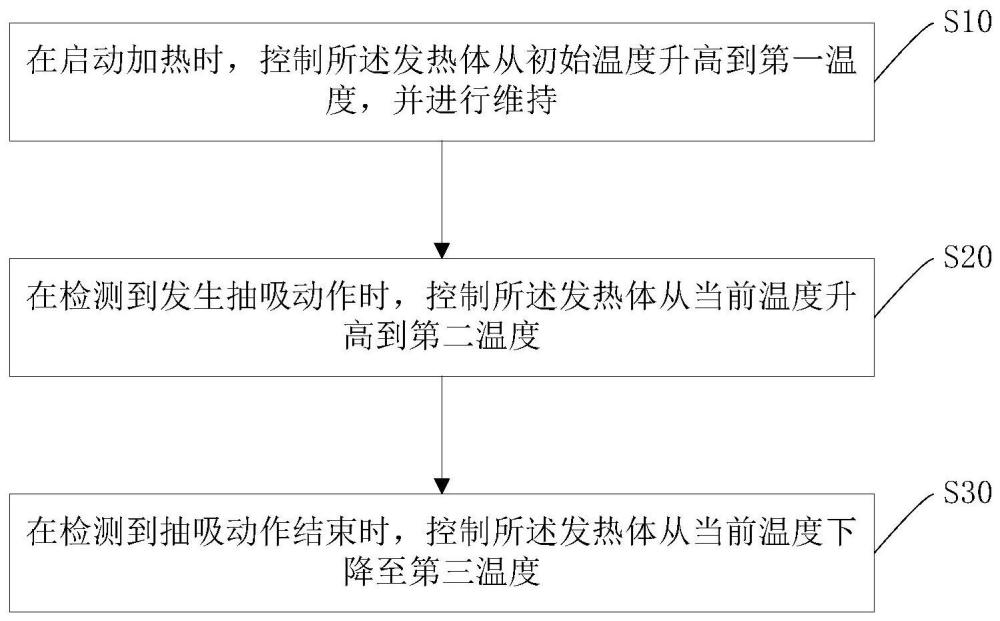
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01