一种双足机器人腿部保护结构
- 国知局
- 2024-08-01 08:05:54
本技术涉及双足机器人,尤其涉及一种双足机器人腿部保护结构。
背景技术:
1、双足机器人是一种仿生类型的机器人,能够实现机器人的双足行走和相关动作。传统的双足机器人,通常会在上身与大腿之间、大腿与小腿之间、小腿与脚部之间各个腿部关节处设置不同舵机以实现关节运动,这样整机质量较大,腿部结构在工作过程中的惯量比较大,针对腿部惯量大而对机器人姿态影响较大的情况,会增大双足机器人步行稳定性控制算法的难度要求,并引起舵机的功耗比较大。
2、现有技术中cn112046639b公开了一种双足机器人,该双足机器人中,上身架成对间隔布置有腿部结构。在一个腿部结构中,第一舵机与第二舵机平行间隔地设在上身架,第一舵机能驱动第一摇杆摆动以带动第一连杆,第二舵机能驱动第二摇杆摆动以带动第二连杆,带动与第一连杆、第二连杆枢接的支撑脚,支撑脚能提供足够支撑作用,腿部结构简单,整机质量较小。该双足机器人中,将质量较大的第一舵机与第二舵机设在上身架,腿部结构除了第一舵机与第二舵机外的零部件相对上身部分质量较小,将机器人整体质心调整到上身部分,降低腿部结构在工作过程中的惯量,对机器人姿态影响变小,对步行稳定性控制算法要求降低,所需驱动力变小以降低舵机功耗。
3、但现有的双足机器人通常在驱动关节处部件相对较多,使得转动关节相对脆弱,从而在双足机器人运动的过程中容易摔倒碰触到关节处而造成关节处零部件的损坏。
技术实现思路
1、本实用新型的目的在于提供一种双足机器人腿部保护结构,现有的双足机器人通常在驱动关节处部件相对较多,使得转动关节相对脆弱,从而在双足机器人运动的过程中容易摔倒碰触到关节处而造成关节处零部件的损坏。
2、为实现上述目的,本实用新型提供了一种双足机器人腿部保护结构,包括连接机架、活动臂和底板,所述活动臂设置在所述连接机架上,并位于所述连接机架的一侧,所述底板设置在所述活动臂上,并位于所述活动臂远离所述连接机架的一侧,
3、还包括保护组件,
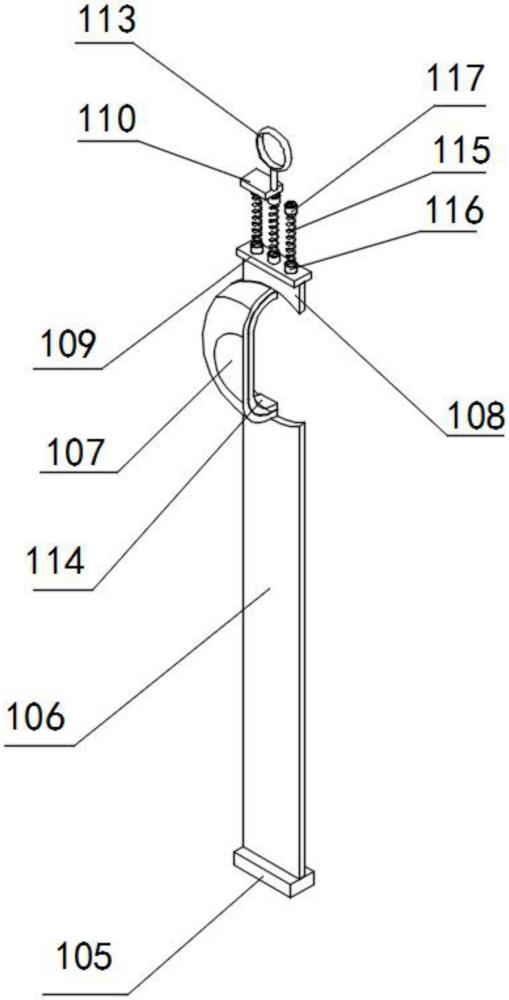
4、所述保护组件包括连接底座、第一连接带、保护盖、第二连接带、连接块、移动板、固定板、挂钩、挂环和伸缩弹簧,所述连接底座与所述底板固定连接,并位于所述底板的一侧,所述第一连接带与所述连接底座固定连接,并位于所述连接底座的一侧,所述保护盖与所述第一连接带固定连接,并位于所述第一连接带远离所述连接底座的一侧,所述第二连接带与所述保护盖固定连接,并位于所述保护盖远离所述第一连接带的一侧,所述连接块与所述第二连接带固定连接,并位于所述第二连接带的一侧,所述移动板与所述连接块通过所述伸缩弹簧连接,并位于所述连接块的一侧,所述固定板与所述活动臂固定连接,并位于所述活动臂的一侧,所述挂钩与所述固定板固定连接,并位于所述固定板的一侧,所述挂环与所述移动板固定连接,并位于所述移动板的一侧,所述伸缩弹簧设置在所述连接块上,并与所述移动板连接。
5、其中,所述伸缩弹簧包括弹簧本体和固定构件,所述弹簧本体的两端分别与所述连接块和所述移动板通过所述固定构件连接,所述弹簧本体位于所述连接块靠近所述移动板的一侧;所述固定构件设置在所述连接块和所述移动板上,并与所述弹簧本体连接。
6、其中,所述固定构件包括第一固定座和第二固定座,所述第一固定座分别与所述连接块和所述弹簧本体固定连接,所述第一固定座位于所述连接块靠近所述弹簧本体的一侧;所述第二固定座分别与所述移动板和所述弹簧本体固定连接,所述第二固定座位于所述移动板靠近所述弹簧本体的一侧。
7、其中,所述保护组件还包括海绵块,所述海绵块与所述保护盖固定连接,并位于所述保护盖的一侧。
8、其中,所述保护组件还包括绑定构件,所述绑定构件包括绑带和魔术贴,所述绑带与所述连接机架固定连接,并位于所述连接机架的一侧;所述魔术贴设置在所述绑带上,并位于所述绑带的一侧。
9、本实用新型的一种双足机器人腿部保护结构,需要对所述活动臂关节处进行保护时,通过将所述保护盖覆盖在所述活动臂的关节处,同时移动所述移动板来拉伸所述伸缩弹簧,在所述伸缩弹簧的拉伸下使得所述移动板上的所述挂环能够移动到达所述挂钩的缺口处,松开所述移动板使得所述挂环能够通过所述挂钩的缺口环扣进所述挂钩内,进而对所述保护盖的位置进行固定,从而通过所述保护盖的遮挡保护来避免双足机器人脆弱的关节连接处受到损坏。
技术特征:1.一种双足机器人腿部保护结构,包括连接机架、活动臂和底板,所述活动臂设置在所述连接机架上,并位于所述连接机架的一侧,所述底板设置在所述活动臂上,并位于所述活动臂远离所述连接机架的一侧,其特征在于,
2.如权利要求1所述的双足机器人腿部保护结构,其特征在于,
3.如权利要求2所述的双足机器人腿部保护结构,其特征在于,
4.如权利要求1所述的双足机器人腿部保护结构,其特征在于,
5.如权利要求1所述的双足机器人腿部保护结构,其特征在于,
技术总结本技术涉及双足机器人技术领域,具体涉及一种双足机器人腿部保护结构,包括连接机架、活动臂和底板,还包括保护组件,保护组件包括连接底座、第一连接带、保护盖、第二连接带、连接块、移动板、固定板、挂钩、挂环和伸缩弹簧,连接底座与底板固定连接,第一连接带与连接底座固定连接,保护盖与第一连接带固定连接,第二连接带与保护盖固定连接,连接块与第二连接带固定连接,移动板与连接块通过伸缩弹簧连接,固定板与活动臂固定连接,挂钩与固定板固定连接,挂环与移动板固定连接,伸缩弹簧设置在连接块上,并与移动板连接,通过保护盖的遮挡保护来避免双足机器人脆弱的关节连接处受到损坏。技术研发人员:汪浩,樊若涵受保护的技术使用者:桂林电子科技大学技术研发日:20231117技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/230386.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表