一种筒纱纱头抓取机器人、筒纱位置确定方法与流程
- 国知局
- 2024-07-05 16:10:47
本发明涉及一种机器人,具体涉及一种筒纱纱头抓取机器人。
背景技术:
1、在整经车间中,筒子架上悬挂数百个筒纱,筒纱的高低差距可达240毫米至40毫米不等。目前,筒纱找纱头的过程通常依赖人工手动操作。一方面,随着经济水平的提升,劳动力成本提高,加重了纺织企业的用工成本。与此同时,筒子架上筒纱的数量众多,且位置高低不一,这导致人工找纱头的工作量大、效率低下,并可能存在找纱头过程中对纱线造成损伤,这些缺陷无法满足企业高效、低成本生产需求。
2、在经过络筒工序后的筒纱,即使在筒纱定长条件下,由于受到络筒时纱线拉伸张力差异、纱线特性及后续包装等环节的影响,其直径会存在一定差异。因此,在实现筒纱纱头自动抓取过程中,准确确定筒纱位置显得尤为重要。
3、光电传感器对环境光线、杂散光和物体表面特性等因素较为敏感,可能导致误检测或不稳定性,在工业生产过程中可靠性和稳定性尤为重要;由于纺织车间空气中往往存在一定量漂浮纤维,当纤维依附在光电传感器表面时,可能对其定位效果产生不利影响;对于筒纱定位而言,需要高精度光电传感器精准定位,但高精度光电传感器伴随着成本高昂和维护频繁。
技术实现思路
1、本发明的第一个目的是提供一种筒纱纱头抓取机器人,解决了人工寻找纱头工作量大的问题,提高了找纱头的效率。
2、本发明为实现上述目的,采用以下的技术方案:
3、一种筒纱纱头抓取机器人,包括电机、转动件、吸纱嘴和负压风机,所述转动件与电机输出端连接,电机驱动转动件上的筒纱旋转;所述吸纱嘴通过负压气管与负压风机连接,吸纱嘴位于转动件下方。
4、进一步地,还包括送纱机器人,送纱机器人配置在转动件的一侧;送纱机器人上设有托纱组件和压紧组件,压紧组件固定在托纱组件上,所述托纱组件将筒纱送至转动件上,压紧组件与筒纱小端直径相适配。
5、进一步地,所述托纱组件包括托纱板、托纱臂架和限位板,托纱板连接着送纱机器人,筒纱通过托纱臂架固定在托纱板上,所述限位板使筒纱固定在托纱臂架上。
6、进一步地,所述压紧组件包括压紧块和带座轴承,压紧块通过带座轴承固定在托纱板上,压紧块能相对于托纱板旋转。
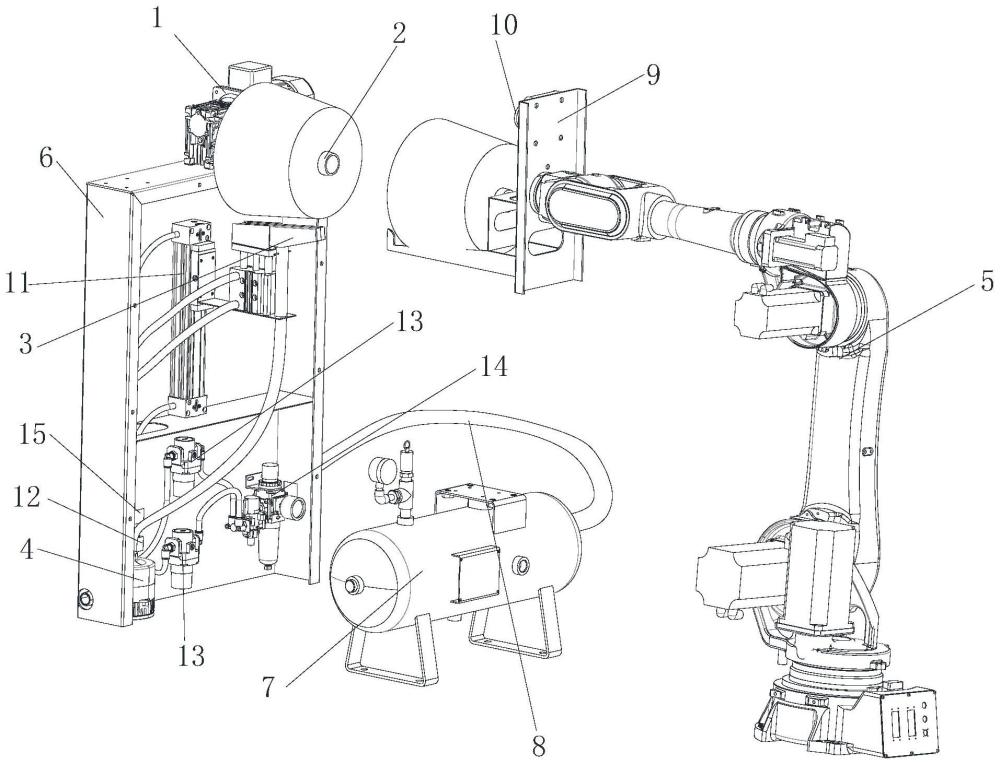
7、进一步地,还包括固定架和储气罐,所述吸纱嘴通过滑动组件连接在固定架上,电机固定在固定架顶部;所述固定架还连接有第一电磁阀、第二电磁阀、减压阀、控制阀和压力传感器;所述储气罐通过连接管依次连接控制阀、减压阀、第一电磁阀第二电磁阀;第一电磁阀连接有压力传感器。
8、进一步地,所述转动件包括转动杆,转动杆上连接着筒纱,转动杆与电机输出端法兰连接。
9、进一步地,所述滑动组件包括无杆气缸和滑块,无杆气缸固定在固定架上,滑块配置在无杆气缸上,吸纱嘴通过连接板与滑块连接;所述无杆气缸通过进气管和出气管与第二电磁阀连接。
10、进一步地,所述连接板上连接有导杆气缸,导杆气缸伸缩端连接有筒纱探测板;导杆气缸与第一电磁阀连接。
11、进一步地,所述负压气管上设有光纤传感器。
12、本发明的另一个目的是提供一种筒纱位置确定方法,解决了在整经车间的复杂环境中难以精准确定筒纱位置的问题。
13、本发明为实现上述目的,采用以下的技术方案:
14、一种筒纱位置确定方法,使用如上述实施例所述的一种筒纱纱头抓取机器人,包括:筒纱固定到转动杆上后,无杆气缸驱动滑块向上运动,滑块带动筒纱探测板向上运动,直至筒纱探测板触碰到筒纱后;压力传感器接收到压力信号并将信号传递给第一电磁阀,第一电磁阀控制导杆气缸收缩,使筒纱探测板下降,负压风机和电机启动。
15、本发明与现有技术相比,具有如下优点和有益效果:
16、本发明中通过送纱机器人驱动托纱组件取放筒纱、电机驱动转动件带动筒纱旋转,无杆滑台带动筒纱探测板控制吸纱嘴和筒纱之间的距离,减小吸纱嘴的能耗,也实现了筒纱位置精准定位及筒纱纱头低耗负压抓取,从而实现在织造生产过程中筒纱架上筒纱的自动找纱头动作,降低人工工作难度和工作量,满足企业高效、低成本生产需求。所述限位板设计不仅能限制筒纱位置,还可以减少送纱机器人不必要额外附加动作,同时能够在当筒纱在托纱组件和转动件之间转移存在阻力时,提供必要的推力。所述无杆气缸可通过减压阀灵活控制气压压力,从而改变无杆气缸的驱动力大小,以此满足无杆气缸驱动力小于导杆气缸推力要求。同时,无杆气缸与导杆气缸共用同一气源,减少使用电机编码器,有效降低设备成本。所述筒纱探测板通过与筒纱接触,能够精准定位筒纱的实际位置,避免由于车间环境造成的定位不精准情况;该定位方式可实现筒纱与吸纱嘴之间距离可无限接近但不接触,提高筒纱纱头抓取的可靠性和稳定性,通过降低吸纱嘴与筒纱之间距离,降低所需真空气体量,降低真空气体消耗。
技术特征:1.一种筒纱纱头抓取机器人,其特征在于,包括电机、转动件、吸纱嘴和负压风机,所述转动件与电机输出端连接,电机驱动转动件上的筒纱旋转;所述吸纱嘴通过负压气管与负压风机连接,吸纱嘴位于转动件下方。
2.根据权利要求1所述的一种筒纱纱头抓取机器人,其特征在于,还包括送纱机器人,送纱机器人配置在转动件的一侧;送纱机器人上设有托纱组件和压紧组件,压紧组件固定在托纱组件上,所述托纱组件将筒纱送至转动件上,压紧组件与筒纱小端直径相适配。
3.根据权利要求2所述的一种筒纱纱头抓取机器人,其特征在于,所述托纱组件包括托纱板、托纱臂架和限位板,托纱板连接着送纱机器人,筒纱通过托纱臂架固定在托纱板上,所述限位板使筒纱固定在托纱臂架上。
4.根据权利要求3所述的一种筒纱纱头抓取机器人,其特征在于,所述压紧组件包括压紧块和带座轴承,压紧块通过带座轴承固定在托纱板上,压紧块能相对于托纱板旋转。
5.根据权利要求1所述的一种筒纱纱头抓取机器人,其特征在于,还包括固定架和储气罐,所述吸纱嘴通过滑动组件连接在固定架上,电机固定在固定架顶部;所述固定架还连接有第一电磁阀、第二电磁阀、减压阀、控制阀和压力传感器;所述储气罐通过连接管依次连接控制阀、减压阀、第一电磁阀和第二电磁阀;第一电磁阀连接有压力传感器。
6.根据权利要求5所述的一种筒纱纱头抓取机器人,其特征在于,所述转动件包括转动杆,转动杆上连接着筒纱,转动杆与电机输出端法兰连接。
7.根据权利要求6所述的一种筒纱纱头抓取机器人,其特征在于,所述滑动组件包括无杆气缸和滑块,无杆气缸固定在固定架上,滑块配置在无杆气缸上,吸纱嘴通过连接板与滑块连接;所述无杆气缸通过进气管和出气管与第二电磁阀连接。
8.根据权利要求7所述的一种筒纱纱头抓取机器人,其特征在于,所述连接板上连接有导杆气缸,导杆气缸伸缩端连接有筒纱探测板;导杆气缸与第一电磁阀连接。
9.根据权利要求5所述的一种筒纱纱头抓取机器人,其特征在于,所述负压气管上设有光纤传感器。
10.一种筒纱位置确定方法,其特征在于,使用如权利要求8所述的一种筒纱纱头抓取机器人,包括:筒纱固定到转动杆上后,无杆气缸驱动滑块向上运动,滑块带动筒纱探测板向上运动,直至筒纱探测板触碰到筒纱后;压力传感器接收到压力信号并将信号传递给第一电磁阀,第一电磁阀控制导杆气缸收缩,使筒纱探测板下降,负压风机和电机启动。
技术总结本发明涉及一种机器人,具体涉及一种筒纱纱头抓取机器人。一种筒纱纱头抓取机器人,包括电机、转动件、送纱机器人、吸纱嘴和负压风机,转动件与电机输出端连接,电机驱动转动件上的筒纱旋转;吸纱嘴通过气管与负压风机连接,吸纱嘴位于转动件下方。送纱机器人配置在转动件的一侧;送纱机器人上设有托纱组件和压紧组件,压紧组件固定在托纱组件上,所述托纱组件将筒纱送至筒纱小端直径上,压紧组件与转动件相适配。托纱组件包括托纱板、托纱臂架和限位板,托纱板连接送纱机器人,筒纱通过托纱臂架固定在托纱板上。本发明设计合理、结构紧凑,筒纱纱头抓取性能稳定且可靠、空间占用小,适用于整经车间复杂环境的特性。技术研发人员:王森栋,张红霞,魏加坤,张艳红,崔桂华,季东晓,闫玉刚,张金峰,高延忠,杨明超,张海忠受保护的技术使用者:魏桥纺织股份有限公司技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240617/40930.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表