一种基于机器视觉的智能化消防炮系统及工作方法与流程
- 国知局
- 2024-07-05 16:58:03
本发明涉及消防设备,具体涉及一种基于机器视觉的智能化消防炮系统及工作方法。
背景技术:
1、消防水炮是以水作介质,远距离扑灭火灾的灭火设备。该炮适用于石油化工企业、储罐区、飞机库、仓库、港口码头、车库等场所,更是消防车理想的车载消防炮。消防水炮分为:自动扫描射水高空水炮、固体手动消防水炮、自动寻消防水炮、电控消防水炮。
2、随着信息技术的快速发展,自动扫描射水高空水炮的应用越来越广泛,其能够在较短的时间内完成火灾的发现以及灭火程序的启动,从而更有效的保护人民的财产安全和生命安全。
3、但是现有技术中心,自动扫描射水高空水炮多是采用固定结构安装在消防管道的末端,导致自动扫描射水高空水炮的机器视觉模块只能获取以安装点为中心点的二维平面图像信息,并且当火源有遮挡时自动扫描射水高空水炮的避障能力有限,容易有暗区死角。
4、尤其是在商场中,通常是将自动扫描射水高空水炮安装在中庭的走廊外侧,通过单个自动扫描射水高空水炮覆盖整个中庭的消防面积,但是由于自动扫描射水高空水炮固定安装方式,加上商场内的复杂环境,更加容易形成机器视觉和水炮的暗区和死角。
技术实现思路
1、针对上述问题本发明提供了一种基于机器视觉的智能化消防炮系统及工作方法,目的是为了解决上述背景技术中提出的自动消防炮固定安装方式容易造成机器视觉和水炮的暗区和死角的技术问题。
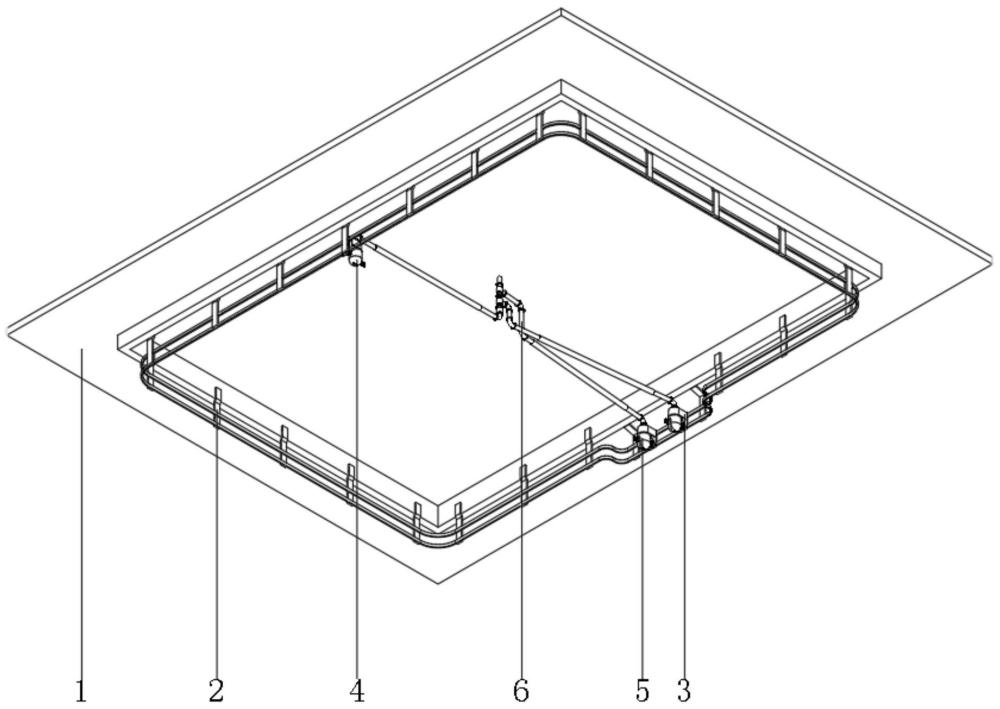
2、为实现上述目的,本发明提供如下技术方案:一种基于机器视觉的智能化消防炮系统,包括中庭楼板,所述中庭楼板的内侧设有巡检轨道,所述巡检轨道的中部设有多个移动小车,其中一个所述移动小车的一侧设有主消防炮,其他多个所述移动小车的一侧分别设有副消防炮,所述主消防炮的输入端和多个所述副消防炮的输入端均设于悬臂机构的输出端,多个所述移动小车、所述主消防炮和多个所述副消防炮均电信连接中央处理器。
3、进一步的,所述巡检轨道包括多个轨道悬架,多个所述轨道悬架的上部均设于所述中庭楼板的内侧,多个所述轨道悬架的均设于双轨轨道的外侧,所述双轨轨道的中部设有副炮收纳凹槽,多个所述移动小车均设于所述双轨轨道的内侧,所述双轨轨道的内侧设有齿条。
4、进一步的,所述移动小车包括多个滑动单元,多个所述滑动单元均设于移动支架的一侧,所述移动支架的中部设有驱动电机,所述驱动电机的多个输出端分别同轴连接驱动齿轮,多个所述驱动齿轮分别咬合连接所述巡检轨道的内侧,所述驱动电机的多个输出端分别转动连接轴固定块,多个所述轴固定块均设于所述移动支架的一侧,所述移动支架的另一侧上部设有防尘罩,所述移动支架的另一侧设有消防炮,所述驱动电机电信连接所述中央处理器。
5、进一步的,所述驱动电机为步进电机。
6、进一步的,所述主消防炮和多个所述副消防炮分别设有高清摄像头和红外摄像头,且所述高清摄像头和所述红外摄像头均随炮口方向摇动,所述高清摄像头和所述红外摄像头均电信连接所述中央处理器。
7、进一步的,所述悬臂机构包括多个首尾相连的中心回转接头,其中最上方的所述中心回转接头的上端法兰连接于消防供水管,多个所述中心回转接头的回转端分别法兰连接伸缩水管的一端,多个所述伸缩水管的另一端分别设有独立回转接头,多个所述独立回转接头的下端分别法兰连接所述主消防炮和多个所述副消防炮。
8、进一步的,所述中央处理器包括巡检模块、图像处理模块、判定模块、控制模块、分控模块;所述巡检模块用于在日常状态下通过所述主消防炮上的机器视觉设备对该系统管辖的区域进行巡视扫描;所述图像处理模块用于接收所述巡检模块获取的视频数据,通过高清图像信息对管辖区域进行建模;所述图像处理模块还用于接收所述巡检模块获取的红外图像数据,根据红外图像数据发现火源,结合区域的三维模型准确定位;所述判定模块用于根据红外图像数据判断多火源等级,并向所述控制模块和所述分控模块发出指令;所述控制模块用于控制所述主消防炮的移动和采取消防措施;所述分控模块用于控制多个所述副消防炮的移动和采取消防措施。
9、根据上述技术方案,还将提供一种基于机器视觉的智能化消防炮系统的工作方法,包括以下步骤:
10、s1.场景建模:所述控制模块控制所述主消防炮沿着所述巡检轨道移动,并通过高清摄像头获取管辖区域内的图像信息数据,所述图像处理模块接收所述巡检模块获取的视频数据,通过高清图像信息对管辖区域进行三维建模;
11、s2.日常巡检:所述巡检模块在日常状态下通过所述主消防炮上的机器视觉设备对该系统管辖的区域进行巡视扫描,时刻保持对管辖区域的关注;
12、s3.发现火情:所述巡检模块根据红外图像数据发现火源,结合区域的三维模型准确定位;
13、s4.采取措施:所述控制模块根据火源的准确定位,控制所述主消防炮移动到与火源之间没有阻挡的位置,瞄准火源开启水炮,通过高清摄像头调整水流落点,直到火源熄灭。
14、进一步的,所述步骤s3中发现多处火源时,所述判定模块根据红外图像数据判断火源等级最高的一处火源,并向所述控制模块发送准确定位;向所述分控模块发送其他多个火源的准确定位,所述分控模块控制多个所述副消防炮分别移动到适当位置,对火源进行降温措施,避免火源扩散。
15、进一步的,所述步骤s3中发现火势较大时,所述判定模块根据红外图像数据判断火源范围大,单个水炮消防效果不明显,则向所述分控模块发送指令,所述分控模块控制多个所述副消防炮分别移动到适当位置,对火源进行辅助消防,辅助所述主消防炮采取措施。
16、与现有技术相比,本发明的有益效果是:
17、通过移动小车、选件轨道和悬臂机构的配合使自动消防炮可以沿着商场中庭楼板的内侧移动巡检,大大减少了机器视觉和水炮的暗区和死角;通过移动采集的高清图像信息对管辖区域进行预建模,在发现火情时根据红外图像数据发现火源,结合区域的三维模型准确定位,使消防措施更加精准;通过多个副消防炮与主消防炮的配合,该系统可以应对更多的火情。
技术特征:1.一种基于机器视觉的智能化消防炮系统,包括中庭楼板(1),其特征在于:所述中庭楼板(1)的内侧设有巡检轨道(2),所述巡检轨道(2)的中部设有多个移动小车(3),其中一个所述移动小车(3)的一侧设有主消防炮(4),其他多个所述移动小车(3)的一侧分别设有副消防炮(5),所述主消防炮(4)的输入端和多个所述副消防炮(5)的输入端均设于悬臂机构(6)的输出端,多个所述移动小车(3)、所述主消防炮(4)和多个所述副消防炮(5)均电信连接中央处理器。
2.根据权利要求1所述的一种基于机器视觉的智能化消防炮系统,其特征在于:所述巡检轨道(2)包括多个轨道悬架(21),多个所述轨道悬架(21)的上部均设于所述中庭楼板(1)的内侧,多个所述轨道悬架(21)的均设于双轨轨道(22)的外侧,所述双轨轨道(22)的中部设有副炮收纳凹槽(23),多个所述移动小车(3)均设于所述双轨轨道(22)的内侧,所述双轨轨道(22)的内侧设有齿条。
3.根据权利要求1所述的一种基于机器视觉的智能化消防炮系统,其特征在于:所述移动小车(3)包括多个滑动单元(31),多个所述滑动单元(31)均设于移动支架(32)的一侧,所述移动支架(32)的中部设有驱动电机(33),所述驱动电机(33)的多个输出端分别同轴连接驱动齿轮(34),多个所述驱动齿轮(34)分别咬合连接所述巡检轨道(2)的内侧,所述驱动电机(33)的多个输出端分别转动连接轴固定块(35),多个所述轴固定块(35)均设于所述移动支架(32)的一侧,所述移动支架(32)的另一侧上部设有防尘罩(36),所述移动支架(32)的另一侧设有消防炮,所述驱动电机(33)电信连接所述中央处理器。
4.根据权利要求3所述的一种基于机器视觉的智能化消防炮系统,其特征在于:所述驱动电机(33)为步进电机。
5.根据权利要求1所述的一种基于机器视觉的智能化消防炮系统,其特征在于:所述主消防炮(4)和多个所述副消防炮(5)分别设有高清摄像头和红外摄像头,且所述高清摄像头和所述红外摄像头均随炮口方向摇动,所述高清摄像头和所述红外摄像头均电信连接所述中央处理器。
6.根据权利要求1所述的一种基于机器视觉的智能化消防炮系统,其特征在于:所述悬臂机构(6)包括多个首尾相连的中心回转接头(61),其中最上方的所述中心回转接头(61)的上端法兰连接于消防供水管(62),多个所述中心回转接头(61)的回转端分别法兰连接伸缩水管(63)的一端,多个所述伸缩水管(63)的另一端分别设有独立回转接头(64),多个所述独立回转接头(64)的下端分别法兰连接所述主消防炮(4)和多个所述副消防炮(5)。
7.根据权利要求1所述的一种基于机器视觉的智能化消防炮系统,其特征在于:所述中央处理器包括巡检模块、图像处理模块、判定模块、控制模块、分控模块;所述巡检模块用于在日常状态下通过所述主消防炮(4)上的机器视觉设备对该系统管辖的区域进行巡视扫描;所述图像处理模块用于接收所述巡检模块获取的视频数据,通过高清图像信息对管辖区域进行建模;所述图像处理模块还用于接收所述巡检模块获取的红外图像数据,根据红外图像数据发现火源,结合区域的三维模型准确定位;所述判定模块用于根据红外图像数据判断多火源等级,并向所述控制模块和所述分控模块发出指令;所述控制模块用于控制所述主消防炮(4)的移动和采取消防措施;所述分控模块用于控制多个所述副消防炮(5)的移动和采取消防措施。
8.一种基于机器视觉的智能化消防炮系统的工作方法,用到权利要求1-7任一项所述的一种基于机器视觉的智能化消防炮系统,其特征在于,包括以下步骤:
9.根据权利要求8所述的一种基于机器视觉的智能化消防炮系统的工作方法,其特征在于:所述步骤s3中发现多处火源时,所述判定模块根据红外图像数据判断火源等级最高的一处火源,并向所述控制模块发送准确定位;向所述分控模块发送其他多个火源的准确定位,所述分控模块控制多个所述副消防炮(5)分别移动到适当位置,对火源进行降温措施,避免火源扩散。
10.根据权利要求8所述的一种基于机器视觉的智能化消防炮系统的工作方法,其特征在于:所述步骤s3中发现火势较大时,所述判定模块根据红外图像数据判断火源范围大,单个水炮消防效果不明显,则向所述分控模块发送指令,所述分控模块控制多个所述副消防炮(5)分别移动到适当位置,对火源进行辅助消防,辅助所述主消防炮(4)采取措施。
技术总结本发明提供了一种基于机器视觉的智能化消防炮系统及工作方法,涉及消防设备技术领域,包括中庭楼板、巡检轨道、多个移动小车、主消防炮、多个副消防炮、悬臂机构和中央处理器,该发明通过移动小车、选件轨道和悬臂机构的配合使自动消防炮可以沿着商场中庭楼板的内侧移动巡检,大大减少了机器视觉和水炮的暗区和死角;通过移动采集的高清图像信息对管辖区域进行预建模,在发现火情时根据红外图像数据发现火源,结合区域的三维模型准确定位,使消防措施更加精准;通过多个副消防炮与主消防炮的配合,该系统可以应对更多的火情。技术研发人员:林议安,赖龙钦,高英彬受保护的技术使用者:福建省宇安机电设备有限公司技术研发日:技术公布日:2024/2/8本文地址:https://www.jishuxx.com/zhuanli/20240617/45621.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表