一种在复杂环境稳定行走的服务机器人底座
- 国知局
- 2024-07-05 17:54:21
本发明涉及下部结构中的底座领域,具体为一种在复杂环境稳定行走的服务机器人底座。
背景技术:
1、随着社会的进步科技的发展,机械化、自动化、标准化生产已经逐渐成为发展趋势,生活中出现越来越多的智能化产品。服务机器人是智能化产品的一大区类,它泛指一切能够代替人从事肮脏、乏味、远程、危险或重复性工作的机器人,这类机器人为人类生活带来更多的便利以及提升生活生产中的工作效率。
2、目前,一些服务机器人会借助使用可移动的底座进行移动,使服务机器人的移动更加自由便捷,在使用后从底座上取下复位机器人即可,使服务机器人能够稳定地放置,相比与直接在服务机器人上加设可移动的部件,使用可移动的底座的方式,服务机器人的使用安全性更高,自由度更高,人可操控程度更大更灵活。
3、但是目前的移动底座板直,在一些复杂地形例如地面凹凸程度不一的情况下,移动底座容易跟着地面的位置,与水平面产生夹角,使其上的服务机器人倾斜而导致服务机器人的重心发生偏移,则服务机器人变得更加容易出现倾倒以及带着移动底座翻车等情况,导致服务机器人在过程中的安全性大幅降低。
技术实现思路
1、本发明提出一种在复杂环境稳定行走的服务机器人底座,旨在解决现有的移动底座在复杂地形中移动时容易发生倾倒翻车的问题。
2、技术方案包括:座板以及设置在座板底部的移动轮;还包括:连接在座板底部的连接架,连接架设置有两个,其中一个转动连接在座板上,另一个固定连接在座板上;分别设置在各连接架左右两端的活塞腔;滑动连接在各活塞腔内的连接臂,移动轮分别转动设置在各连接臂下端部;转动连接在其中一个连接架底部的转轴,转轴与连接在该连接架上的移动轮连接,控制连接在该连接架上的移动轮同步转动;固定连接在该连接架上的电机x;连接在电机x的输出端与转轴之间的传动件。
3、其进一步的技术方案为,还包括:连接在转轴与其所在连接架上的移动轮之间的万向节,移动轮与转轴的两端之间通过万向节传动连接。
4、其进一步的技术方案为,还包括:固定连接在万向节与移动轮之间的连接套筒,连接套筒转动连接在连接臂的下端部;固定连接在移动轮内部的导向槽框;滑动连接在导向槽框的抓板,抓板滑动时能够从移动轮内伸出;转动连接在移动轮内的导向槽块,抓板与导向槽块滑动连接,导向槽块转动控制抓板在导向槽框内滑动;固定连接在连接套筒内的电机y,电机y的输出端与导向槽块固定连接。
5、其进一步的技术方案为,导向槽块上开设有槽道,槽道设置为圆弧形,槽道的两端与导向槽块的转动轴心的距离不一致,槽道内设有导向杆,抓板滑动安装在导向杆上以及槽道内,槽道限制抓板移动。
6、其进一步的技术方案为,还包括:固定连接在抓板外端部上的摩擦凸点。
7、其进一步的技术方案为,还包括:转动连接在抓板两侧的连接块x;固定连接在连接块x上的连接杆;滑动连接在连接杆上的连接块y;转动连接在连接块y上的封板,封板能够闭合在抓板上方,堵住移动轮上供抓板穿出的出口;套设在连接杆上的弹性件,弹性件的两端分别与连接块x和连接块y固定。
8、其进一步的技术方案为,还包括:滑动连接在活塞腔内部的压板;螺纹连接在连接架顶部的螺杆,螺杆与压板转动连接。
9、其进一步的技术方案为,还包括:固定连接在连接臂下端部的安装板;连接在安装板上的清洁轮,清洁轮能够与从移动轮内伸出的抓板接触。
10、其进一步的技术方案为,清洁轮和安装板通过螺栓相连接,方便对清洁轮更换。
11、其进一步的技术方案为,传动件由两个传动轮以及绕设在两个传动轮之间的传动带组成,两个传动轮分别固定连接在电机x的输出端以及转轴上。
12、有益效果:1、所述底座设置活塞腔与连接臂,在其二的调节连接作用下,使移动轮受到地形的作用并不直接反馈在座板上,而是被活塞腔和连接臂中和,使座板的顶面保持平直,而保证服务机器人在移动过程中,其重心始终保持稳定,从而提高所述底座在复杂环境下的使用效果。
13、2、所述底座设置抓板等,控制抓板伸出后,移动轮转动,抓板将陷入地面内,而能够更加稳定抓地,防止移动轮在移动过程中打滑,使所述底座能够稳定行进;摩擦凸点增大抓板与地面摩擦力,进一步提高抓板的抓地效果。
14、3、所述底座设置封板等,封板闭合能够堵住移动轮上的出口,对移动轮内的抓板进行保护,防止外界杂质进入移动轮内影响抓板的正常运行,提高抓板的使用设置。
15、4、所述底座设置压板等,使得在使用所述底座时,可根据现场环境的颠簸情况,改变活塞腔压力值,使移动轮的移动变化幅度能够更加稳定,提高移动轮的使用设置。
16、5、所述底座设置清洁轮等,对抓板上沾附的脏污杂质进行清理,防止抓板将脏污杂质带入移动轮内对抓板的运行产生影响,同时还能够便捷清理,减少由脏污杂质进入移动轮内导致的清洁不便。
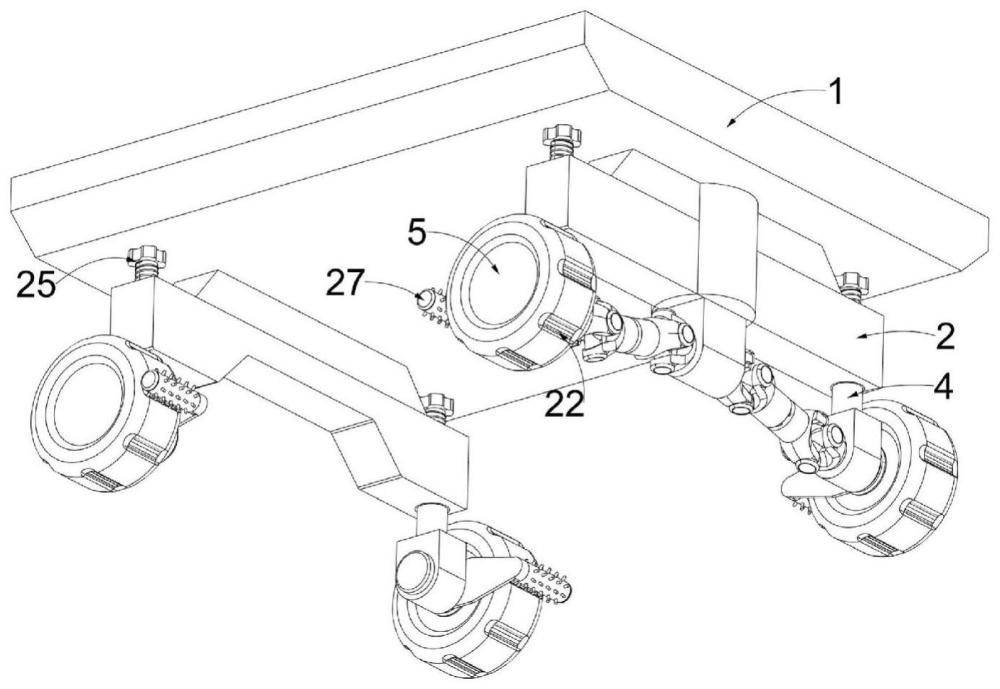
技术特征:1.一种在复杂环境稳定行走的服务机器人底座,包括:用于安装服务机器人的座板(1)以及设置在座板(1)底部的移动轮(5);其特征在于,还包括:连接在座板(1)底部的连接架(2),连接架(2)设置有两个,其中一个转动连接在座板(1)上,另一个固定连接在座板(1)上;分别设置在各连接架(2)左右两端的活塞腔(3);滑动连接在各活塞腔(3)内的连接臂(4),移动轮(5)分别转动设置在各连接臂(4)下端部;转动连接在其中一个连接架(2)底部的转轴(7),转轴(7)与连接在该连接架(2)上的移动轮(5)连接,控制连接在该连接架(2)上的移动轮(5)同步转动;固定连接在该连接架(2)上的电机x(8);连接在电机x(8)的输出端与转轴(7)之间的传动件(9),电机x(8)通过传动件(9)控制转轴(7)转动,进而控制与转轴(7)连接的移动轮(5)转动。
2.根据权利要求1所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,还包括:连接在转轴(7)与其所在连接架(2)上的移动轮(5)之间的万向节(6),移动轮(5)与转轴(7)的两端之间通过万向节(6)传动连接,无论各移动轮(5)是否在同一高度位置。
3.根据权利要求2所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,还包括:固定连接在万向节(6)与移动轮(5)之间的连接套筒(10),连接套筒(10)转动连接在连接臂(4)的下端部;固定连接在移动轮(5)内部的导向槽框(11);滑动连接在导向槽框(11)的抓板(12),抓板(12)滑动时能够从移动轮(5)内伸出,增加移动轮(5)表面凹凸不平的程度;转动连接在移动轮(5)内的导向槽块(13),抓板(12)与导向槽块(13)滑动连接,导向槽块(13)转动控制抓板(12)在导向槽框(11)内滑动;固定连接在连接套筒(10)内的电机y(16),电机y(16)的输出端与导向槽块(13)固定连接。
4.根据权利要求3所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,导向槽块(13)上开设有槽道(14),槽道(14)设置为圆弧形,槽道(14)的两端与导向槽块(13)的转动轴心的距离不一致,槽道(14)内设有导向杆(15),抓板(12)滑动安装在导向杆(15)上以及槽道(14)内,槽道(14)限制抓板(12)移动。
5.根据权利要求4所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,还包括:固定连接在抓板(12)外端部上的摩擦凸点(17),摩擦凸点(17)用于增加抓板(12)与地面接触的摩擦系数。
6.根据权利要求5所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,还包括:转动连接在抓板(12)两侧的连接块x(19);固定连接在连接块x(19)上的连接杆(20);滑动连接在连接杆(20)上的连接块y(21);转动连接在连接块y(21)上的封板(22),封板(22)能够闭合在抓板(12)上方,堵住移动轮(5)上供抓板(12)穿出的出口;套设在连接杆(20)上的弹性件(23),弹性件(23)的两端分别与连接块x(19)和连接块y(21)固定。
7.根据权利要求6所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,还包括:滑动连接在活塞腔(3)内部的压板(24),压板(24)上下移动,改变活塞腔(3)内的体积;螺纹连接在连接架(2)顶部的螺杆(25),螺杆(25)与压板(24)转动连接。
8.根据权利要求7所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,还包括:固定连接在连接臂(4)下端部的安装板(26);连接在安装板(26)上的清洁轮(27),清洁轮(27)能够与从移动轮(5)内伸出的抓板(12)接触。
9.根据权利要求8所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,清洁轮(27)和安装板(26)通过螺栓相连接,方便对清洁轮(27)更换。
10.根据权利要求9所述的一种在复杂环境稳定行走的服务机器人底座,其特征在于,传动件(9)由两个传动轮以及绕设在两个传动轮之间的传动带组成,两个传动轮分别固定连接在电机x(8)的输出端以及转轴(7)上。
技术总结本发明涉及下部结构中的底座领域,具体为一种在复杂环境稳定行走的服务机器人底座,包括:连接在座板底部的连接架;分别设置在各连接架左右两端的活塞腔;滑动连接在各活塞腔内的连接臂,移动轮分别转动设置在各连接臂下端部;转动连接在其中一个连接架底部的转轴;固定连接在该连接架上的电机X;连接在电机X的输出端与转轴之间的传动件。所述底座设置活塞腔与连接臂,在其二的调节连接作用下,使移动轮受到地形的作用并不直接反馈在座板上,而是被活塞腔和连接臂中和,使座板的顶面保持平直,而保证服务机器人在移动过程中,其重心始终保持稳定,从而提高所述底座在复杂环境下的使用效果。技术研发人员:林祝亮,陈舟恺,鄂采洋,曹振新,李凝受保护的技术使用者:浙江师范大学技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49591.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表