一种机器人视觉自动抓取装置及方法
- 国知局
- 2024-07-05 17:55:01
本发明属于机器人,具体为一种机器人视觉自动抓取装置及方法。
背景技术:
1、机器人视觉自动抓取装置是一种基于机器视觉技术的装置,可以通过识别、定位和跟踪目标物体,自动完成抓取、搬运等任务,该装置通常包括视觉系统、控制系统和执行机构等部分,其中视觉系统负责获取目标物体的图像信息,控制系统负责分析和处理图像信息,并生成控制指令,执行机构则根据控制指令完成抓取等动作。
2、现有的部分机器人视觉自动抓取装置,在实际使用中,需求不同时,需要安装更换不同类型的机械爪,现有的部分机器人视觉自动抓取装备,其拆卸更换不便,导致其拆卸更换较为麻烦,现有的部分机器人视觉自动抓取装置,摄像头在长期使用中摄像头上会产留有灰尘,其没有清洁设备,如不及时清洁,容易使摄像头识别有偏差。
技术实现思路
1、本发明的目的在于:一种机器人视觉自动抓取装置及方法,通过将机械爪对接到对接筒内,然后开启固定电机,通过固定电机转动可以使固定锥形齿轮转动,通过固定锥形齿轮带动连接锥形齿轮转动可以使支撑螺纹杆转动,支撑螺纹杆转动可以使安装锥形齿轮转动,通过安装锥形齿轮和传动锥形齿轮的啮合,可以使固定螺纹杆转动,通过固定夹的限位可以使固定夹移动将机械爪固定住,通过支撑螺纹杆的转动,使支撑螺纹筒推动推动块移动,通过安装筒在安装杆上滑动,可以使推动块移动到对接筒内挤压弹性固定套,将机械爪固定在固定箱上,可以方便拆卸更换机械爪,通过连接电机转动可以使蜗杆转动,通过蜗杆和蜗轮的啮合,可以使蜗轮带动摄像头旋转,当摄像头通过清洁杆时,连接筒带动支撑架和清洁杆在连接杆上滑动,对摄像头进行清洁,同时通过连接电机的调节,可以调节摄像头的角度。
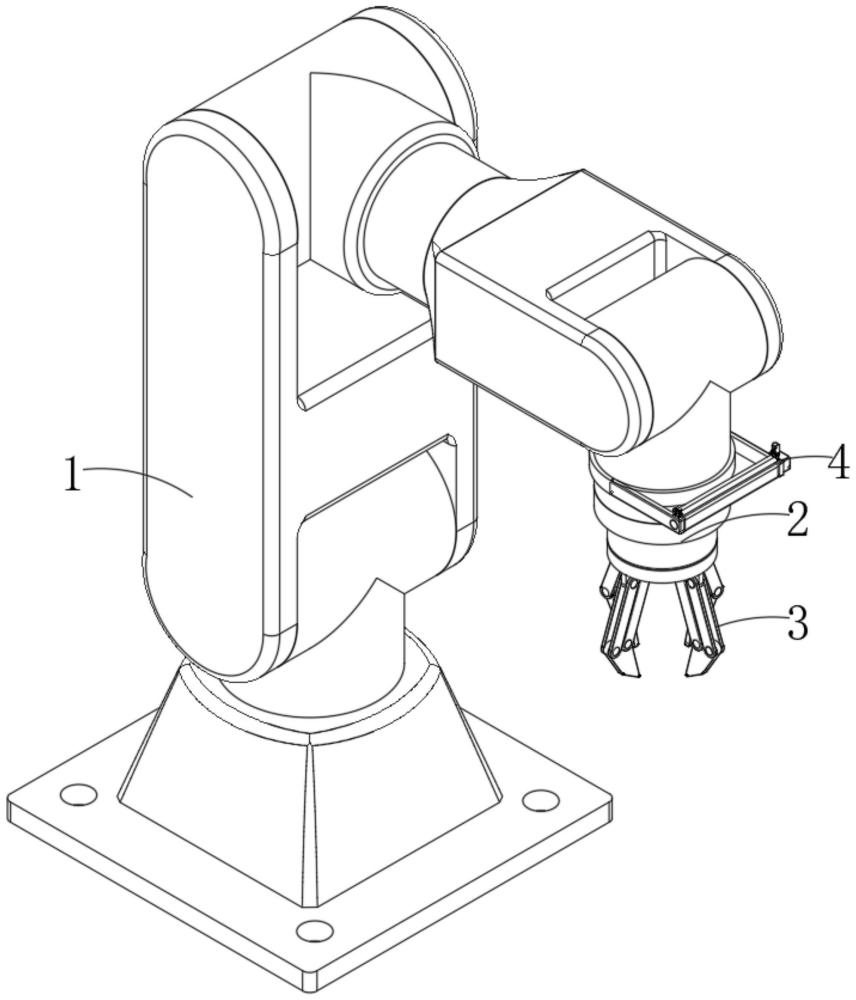
2、本发明采用的技术方案如下:一种机器人视觉自动抓取装置,包括:
3、机器人本体;
4、固定机构,所述固定机构包括固定箱、动力部件、传动部件、四组移动部件、推动部件、两组限位部件和对接部件,所述固定箱的顶部固定连接于机器人本体的底部,所述动力部件设置于固定箱内,所述传动部件和推动部件均设置于动力部件上,每组所述移动部件均设置于固定箱和传动部件上,每组所述限位部件均设置于推动部件上,所述对接部件设置于固定箱的底部;
5、机械爪,所述机械爪设置于固定机构上;以及
6、清洁机构,所述清洁机构包括固定带、两个支撑板、摄像头、调节部件和两组清洁部件,所述固定带固定套设于机器人本体的外表面,两个所述支撑板的一端均固定连接于固定带的一侧外表面,所述摄像头转动连接于两个支撑板之间,所述调节部件设置于摄像头上,每组所述清洁部件均设置于支撑板上。
7、其中,所述动力部件包括安装箱、固定电机、固定锥形齿轮、连接锥形齿轮和支撑螺纹杆,所述安装箱固定连接于固定箱的上内壁,所述固定电机与固定箱固定连接,所述固定锥形齿轮固定套设于固定电机的输出端,所述支撑螺纹杆转动贯穿于安装箱的底部,所述连接锥形齿轮固定套设于支撑螺纹杆的外表面,且连接锥形齿轮和固定锥形齿轮相互啮合。
8、其中,所述传动部件包括安装锥形齿轮和四个传动锥形齿轮,所述安装锥形齿轮固定套设于支撑螺纹杆的外表面,每个所述传动锥形齿轮的一端均转动连接于安装箱的内表壁。
9、其中,每组所述移动部件均包括固定螺纹杆、限位杆和固定夹,所述固定螺纹杆的一端与传动锥形齿轮转动连接,且固定螺纹杆的另一端与固定箱的一侧内壁转动连接,所述限位杆固定连接于安装箱和固定箱之间,所述固定夹螺纹套设于固定螺纹杆的外表面,且固定夹滑动套设于限位杆的外表面。
10、其中,所述推动部件包括支撑螺纹筒和推动块,所述支撑螺纹筒螺纹套设于安装箱的外表面,所述推动块的顶部固定连接于支撑螺纹筒的底端。
11、其中,每组所述限位部件均包括安装杆、安装筒和安装弹簧,所述安装杆的顶端固定连接于安装箱的底部,所述安装筒的底端固定连接于推动块的顶部,且安装筒滑动套设于安装杆的外表面,所述安装弹簧位于安装筒的内部,所述安装弹簧固定连接于安装杆和安装筒之间。
12、其中,所述对接部件包括对接筒和弹性固定套,所述对接筒的顶端固定连接于固定箱的底部,所述弹性固定套固定嵌设于对接筒底部,且弹性固定套位于对接筒的内部。
13、其中,所述调节部件包括连接电机、连接箱、蜗轮和蜗杆,所述连接箱的一侧外表面固定连接于其中一个支撑板的一侧外表面,所述蜗轮固定套设于摄像头的外表面,所述连接电机与连接箱固定连接,所述蜗杆转动连接于连接箱的上下两侧内壁之间,且蜗杆的顶端与连接电机的输出端固定连接,所述蜗杆和蜗轮相互啮合。
14、其中,每组所述清洁部件均包括两个支撑架、清洁杆、两个连接筒、两个连接弹簧和两个连接杆,每个所述连接杆的底端均固定连接于支撑板的顶部,每个所述连接筒均滑动套设于连接杆的外表面,每个所述连接弹簧均固定连接于连接杆和连接筒之间,每个所述支撑架的底部均固定连接于连接筒的顶部,所述清洁杆转动连接于两个支撑架之间。
15、一种机器人视觉自动抓取装置的使用方法,包括以下步骤:
16、步骤一、对接机械爪:将机械爪对接到对接筒内,机械爪位于弹性固定套内,然后开启固定电机,通过固定电机转动可以使固定锥形齿轮转动,通过固定锥形齿轮带动连接锥形齿轮转动可以使支撑螺纹杆转动,支撑螺纹杆转动可以使安装锥形齿轮转动,通过安装锥形齿轮和传动锥形齿轮的啮合,可以使固定螺纹杆转动,通过限位杆的限位可以使固定夹移动将机械爪固定住;
17、步骤二、固定机械爪:通过支撑螺纹杆的转动,使支撑螺纹筒推动推动块移动,通过安装筒在安装杆上滑动,可以使推动块移动到对接筒内挤压弹性固定套,将机械爪固定在固定箱上;
18、步骤三、清洁摄像头:开启连接电机,连接电机转动可以使蜗杆转动,通过蜗杆和蜗轮的啮合,可以使蜗轮带动摄像头旋转,当摄像头通过清洁杆时,连接筒带动支撑架和清洁杆在连接杆上滑动,对摄像头进行清洁,同时通过连接电机的调节,可以调节摄像头的角度。
19、综上所述,由于采用了上述技术方案,本发明的有益效果是:
20、(1)本发明中,通过将机械爪对接到对接筒内,然后开启固定电机,通过固定电机转动可以使固定锥形齿轮转动,通过固定锥形齿轮带动连接锥形齿轮转动可以使支撑螺纹杆转动,支撑螺纹杆转动可以使安装锥形齿轮转动,通过安装锥形齿轮和传动锥形齿轮的啮合,可以使固定螺纹杆转动,通过固定夹的限位可以使固定夹移动将机械爪固定住,通过支撑螺纹杆的转动,使支撑螺纹筒推动推动块移动,通过安装筒在安装杆上滑动,可以使推动块移动到对接筒内挤压弹性固定套,将机械爪固定在固定箱上,可以方便拆卸更换机械爪。
21、(2)本发明中,通过连接电机转动可以使蜗杆转动,通过蜗杆和蜗轮的啮合,可以使蜗轮带动摄像头旋转,当摄像头通过清洁杆时,连接筒带动支撑架和清洁杆在连接杆上滑动,对摄像头进行清洁,同时通过连接电机的调节,可以调节摄像头的角度。
技术特征:1.一种机器人视觉自动抓取装置,其特征在于,包括:
2.如权利要求1所述的一种机器人视觉自动抓取装置,其特征在于:所述动力部件包括安装箱(211)、固定电机(202)、固定锥形齿轮(203)、连接锥形齿轮(204)和支撑螺纹杆(210),所述安装箱(211)固定连接于固定箱(201)的上内壁,所述固定电机(202)与固定箱(201)固定连接,所述固定锥形齿轮(203)固定套设于固定电机(202)的输出端,所述支撑螺纹杆(210)转动贯穿于安装箱(211)的底部,所述连接锥形齿轮(204)固定套设于支撑螺纹杆(210)的外表面,且连接锥形齿轮(204)和固定锥形齿轮(203)相互啮合。
3.如权利要求2所述的一种机器人视觉自动抓取装置,其特征在于:所述传动部件包括安装锥形齿轮(205)和四个传动锥形齿轮(206),所述安装锥形齿轮(205)固定套设于支撑螺纹杆(210)的外表面,每个所述传动锥形齿轮(206)的一端均转动连接于安装箱(211)的内表壁。
4.如权利要求3所述的一种机器人视觉自动抓取装置,其特征在于:每组所述移动部件均包括固定螺纹杆(207)、限位杆(208)和固定夹(209),所述固定螺纹杆(207)的一端与传动锥形齿轮(206)转动连接,且固定螺纹杆(207)的另一端与固定箱(201)的一侧内壁转动连接,所述限位杆(208)固定连接于安装箱(211)和固定箱(201)之间,所述固定夹(209)螺纹套设于固定螺纹杆(207)的外表面,且固定夹(209)滑动套设于限位杆(208)的外表面。
5.如权利要求4所述的一种机器人视觉自动抓取装置,其特征在于:所述推动部件包括支撑螺纹筒(212)和推动块(216),所述支撑螺纹筒(212)螺纹套设于安装箱(211)的外表面,所述推动块(216)的顶部固定连接于支撑螺纹筒(212)的底端。
6.如权利要求5所述的一种机器人视觉自动抓取装置,其特征在于:每组所述限位部件均包括安装杆(213)、安装筒(214)和安装弹簧(215),所述安装杆(213)的顶端固定连接于安装箱(211)的底部,所述安装筒(214)的底端固定连接于推动块(216)的顶部,且安装筒(214)滑动套设于安装杆(213)的外表面,所述安装弹簧(215)位于安装筒(214)的内部,所述安装弹簧(215)固定连接于安装杆(213)和安装筒(214)之间。
7.如权利要求6所述的一种机器人视觉自动抓取装置,其特征在于:所述对接部件包括对接筒(218)和弹性固定套(217),所述对接筒(218)的顶端固定连接于固定箱(201)的底部,所述弹性固定套(217)固定嵌设于对接筒(218)底部,且弹性固定套(217)位于对接筒(218)的内部。
8.如权利要求7所述的一种机器人视觉自动抓取装置,其特征在于:所述调节部件包括连接电机(404)、连接箱(405)、蜗轮(407)和蜗杆(408),所述连接箱(405)的一侧外表面固定连接于其中一个支撑板(402)的一侧外表面,所述蜗轮(407)固定套设于摄像头(406)的外表面,所述连接电机(404)与连接箱(405)固定连接,所述蜗杆(408)转动连接于连接箱(405)的上下两侧内壁之间,且蜗杆(408)的顶端与连接电机(404)的输出端固定连接,所述蜗杆(408)和蜗轮(407)相互啮合。
9.如权利要求8所述的一种机器人视觉自动抓取装置,其特征在于:每组所述清洁部件均包括两个支撑架(410)、清洁杆(409)、两个连接筒(411)、两个连接弹簧(412)和两个连接杆(403),每个所述连接杆(403)的底端均固定连接于支撑板(402)的顶部,每个所述连接筒(411)均滑动套设于连接杆(403)的外表面,每个所述连接弹簧(412)均固定连接于连接杆(403)和连接筒(411)之间,每个所述支撑架(410)的底部均固定连接于连接筒(411)的顶部,所述清洁杆(409)转动连接于两个支撑架(410)之间。
10.一种机器人视觉自动抓取装置的使用方法,其特征在于,应用于权利要求1-9中任意一项所述的一种机器人视觉自动抓取装置中,包括以下步骤:
技术总结本发明公开了一种机器人视觉自动抓取装置及方法,包括机器人本体;固定机构,固定机构包括固定箱、动力部件、传动部件、四组移动部件、推动部件、两组限位部件和对接部件,固定箱的顶部固定连接于机器人本体的底部,动力部件设置于固定箱内,传动部件和推动部件均设置于动力部件上,通过将机械爪对接到对接筒内,通过调节固定夹的位置将机械爪固定住,通过支撑螺纹杆的转动,使支撑螺纹筒推动推动块移动,通过限位,推动块移动挤压弹性固定套,方便拆卸更换机械爪,通过连接电机转动通过传动,可以使摄像头旋转,当摄像头通过清洁杆时,连接筒带动支撑架和清洁杆在连接杆上滑动,对摄像头进行清洁,同时可以调节摄像头的角度。技术研发人员:高娟,李峰受保护的技术使用者:青岛职业技术学院技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。