密度测井源自动装卸装置的制作方法
- 国知局
- 2024-07-08 10:55:56
本技术属于油气测井,尤其涉及一种密度测井源自动装卸装置。
背景技术:
1、在油气测井领域,密度类测井方法常需要安装cs-137密度测井源,放射源活度约1.8ci;该测井源的安装需要将源放入仪器源孔内,并安装至少1个压紧螺钉。安装该测井源需要作业人员近距离使用专用工具进行装卸作业。为尽可能减少放射源对人员的危害,作业人员需要佩戴专用防护铅服、防护眼镜,以及使用特制加长工具进行作业。防护用具及特制加长装卸源工具的使用在一定程度上能减少作业人员受到的辐射,但从根本上仍存在屏蔽防护能力不足的问题。已有研究报告指出,假定操作人员使用模拟源进行了多次有效的训练并具备相当的操作经验,在此条件下进行模拟计算,操作一次1.8ci的cs-137伽马源操作人员所受辐射剂量约0.6-1.0msv。我国放射卫生防护基本标准中,采用了icrp推荐规定的限值,为防止随机效应,规定放射性工作人员受到全身均匀照射时的年剂量当量不应超过50msv(5rem),连续5年平均年剂量当量不应超过20msv(2rem)。显然,人工装卸放射源的方法使操作人员短时受到的强源照射剂量较大。
2、鉴于上述现状存在的问题,目前各测井公司、科技机构等均进行了机器人装卸源的初步研发及尝试。专利“一种核测井仪器用自动装卸源控制装置及方法”提供了一种密度源自动装卸的解决方案,其基本思路是利用三坐标式桁架机械装置配合摄像头来进行远程自动\半自动装卸源作业。专利“放射源的维护系统”提供了一种随钻密度源自动装卸的解决方案,其基本思路也是利用轮式平台及一套三自由度桁架机械装置来对随钻密度源进行装卸、保养、检漏。尽管上述专利从技术方案上提出了一种基本可行的装卸源解决方案,但其技术方案仍存在以下问题:一是目前的三坐标式装卸源机械装置受结构原理的限制,要求仪器必须精准定位,仪器定位不准极易造成装卸源作业失败;二是高清摄像头视觉辅助进行作业这种方式需要作业人员对设备有一定的熟悉程度,且作业时间长,定位不正的情况下需进行多次尝试,效率低下,不利于大规模推广使用。
技术实现思路
1、本实用新型的目的是提供一种密度测井源自动装卸装置,以至少解决现有技术中仪器定位不准造成装卸源失败、作业时间长、效率低下的问题。
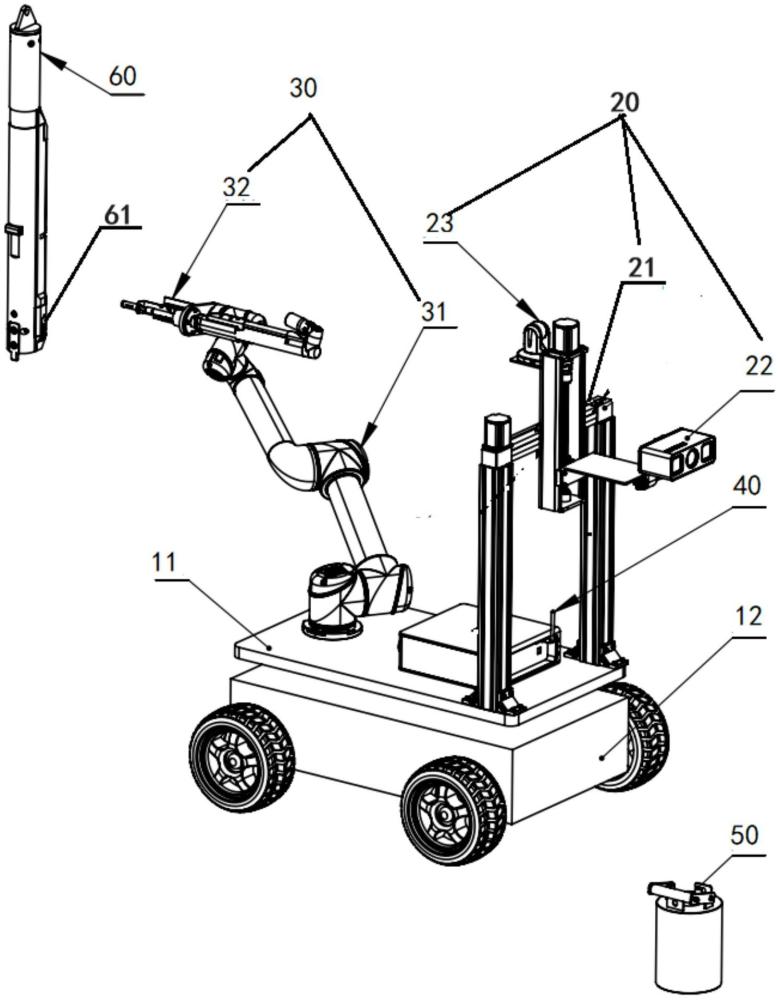
2、为了实现上述目的,本实用新型所提供的密度测井源自动装卸装置主要包括有轮式平台车、视觉辅助单元、六自由度机械臂装卸设备和远程控制单元。轮式平台车包括移动平台车和旋转台面,移动平台车和旋转台面通过旋转机构连接;视觉辅助单元安装在旋转台面上,视觉辅助单元为外部控制终端提供视觉辅助和获取目标物体的三维坐标信息;六自由度机械臂装卸设备的底端安装在旋转台面上,用于向目标物体安装或拆卸密度测井源;远程控制单元安装在旋转台面上并与移动平台车、视觉辅助单元、六自由度机械臂装卸设备以及外部控制终端连接,远程控制单元用于接收外部控制终端的控制指令以控制轮式平台车、视觉辅助单元以及六自由度机械臂装卸设备工作;
3、进一步地,视觉辅助单元包括调节支架、3d坐标采集模块和2d视频采集模块。调节支架安装在旋转台面上;3d坐标采集模块,3d坐标采集模块安装固定调节支架上,3d坐标采集模块用于采集目标物体的三维坐标信息;2d视频采集模块,2d视频采集模块安装在固定调节支架上,2d视频采集模块用于采集目标物体周围的实时视频信息传至外部控制终端;其中,调节支架用于调节3d坐标采集模块和2d视频采集模块的采集位置和角度。
4、进一步地,3d坐标采集模块为多个镜头的高分辨率的3d相机,所述3d相机安装在所述调节支架上,可通过多镜头进行对焦和立体的结构组合,测出目标物体的精确位置和姿态。
5、进一步地,2d视频采集模块为2d摄像头,所述2d摄像头安装在所述调节支架上,可采集所述轮式平台车周围的视频信息。
6、进一步地,调节支架包括固定支架、滑动支架、连接板和调节电机。固定支架安装固定在旋转台面上;滑动支架安装在固定支架上;连接板安装在滑动支架上,用于安装固定3d坐标采集模块;调节电机安装在连接板下方,与3d坐标采集模块连接,用于调节3d坐标采集模块的翻转角度;其中,固定支架用于固定滑动支架,滑动支架可调节2d视频采集模块的位置用以获取周围环境的信息,也可用来调节3d坐标采集模块的位置来采集目标物体的三维坐标信息。
7、进一步地,滑动支架包括横向移动支架和纵向移动支架。横向移动支架安装在固定支架上;纵向移动支架安装在横向移动支架上,用于调节连接板、调节电机和3d坐标采集模块的纵向位置;其中,横向移动支架用来调节纵向移动支架的横向位置,进而可调节连接板、调节电机和3d坐标采集模块的横向位置。
8、进一步地,六自由度机械臂装卸设备包括六自由度机械臂和拧紧机构。六自由度机械臂的底端安装在旋转台面上;拧紧机构安装在六自由度机械臂的末端,拧紧机构用于抓取并安装或拆卸密度测井源;其中,六自由度机械臂用于控制拧紧机构抓取、安装或拆卸密度测井源的角度。
9、进一步地,拧紧机构包括电动拧紧机和套筒调节机构。电动拧紧机通过安装基板和螺钉固定安装在六自由度机械臂的末端;电动拧紧机的前端具有拧紧输出轴、拧紧螺杆,拧紧输出轴和拧紧螺杆刚性连接,拧紧套筒套装在拧紧螺杆上;拧紧螺杆用于装卸密度测井源,拧紧套筒用于安装或卸下压紧螺钉;套筒调节机构,套筒调节机构安装在安装基板上并与拧紧套筒连接;其中,套筒调节机构用于驱动拧紧套筒沿拧紧螺杆的轴向前后滑动以切换拧紧套筒和拧紧螺杆。
10、进一步地,拧紧套筒内部安装有钕磁铁和滑销,其中钕磁铁可吸附压紧螺钉,滑销用于带动拧紧螺杆和拧紧套筒同轴转动。
11、进一步地,套筒调节机构包括固定板、驱动电机和拨叉。固定板通过螺钉固定安装在安装基板上;驱动电机安装在固定板上;拨叉与驱动电机的输出端连接,可调节拧紧套筒的位置来切换拧紧套筒和拧紧螺杆;其中,驱动电机可沿拧紧螺杆轴向的前后位置来移动拨叉,固定板可将驱动电机与安装基板固定连接。
12、本实用新型公开了一种自动装卸源机械装置。自动装卸源机械装置由轮式平台车、视觉辅助单元、六自由度机械臂装卸设备、远程控制单元等组成。视觉辅助单元、六自由度机械臂装卸设备、远程控制单元等安装在轮式平台车上。在进行装卸源作业时,作业人员在确保仪器和源罐固定好后,远程遥控轮式平台车进入作业现场,通过视觉辅助单元获取源罐内的密度测井源、仪器源孔的三维坐标信息,在此基础上六自由度机械臂装卸设备通过三维坐标信息进行精确的装卸密度测井源和压紧螺钉的锁附等作业。与传统三坐标式装卸源机械手相比,本实用新型的创新点在于采用了关节式六自由度机械臂,比三坐标式机械臂具有更多的末端自由度;配合3d视觉辅助装置,可以实现对仪器源孔和源罐的精确空间定位,由此可以实现装卸源过程的全自动化,大幅缩短了整体涉源作业的时间,提高了作业成功率,具有很大的推广使用价值。
13、本实用新型技术方案的有益效果为:
14、1.通过改变机械手结构,提升机械作业的成功率;
15、2.引入新的自动装源系统及方法,彻底替换目前的人工装源作业方式,有效降低辐射作业相关人员的照射率。
本文地址:https://www.jishuxx.com/zhuanli/20240617/51070.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表