一种矿用多关节闭环控制液压机械手的制作方法
- 国知局
- 2024-07-08 10:59:56
本技术涉及机械手,尤其涉及一种矿用多关节闭环控制液压机械手。
背景技术:
1、近年来,矿山安全生产的需求越来越迫切,特别是煤矿井下的生产。煤矿井下作业环境恶劣,工作劳动强度大,工人人身安全受到很大的威胁。随着科学技术的发展,机械手能够代替工人完成很多作业任务,如搬运、码垛、焊接喷涂等等。由于井下防爆要求和工作环境的限制,工业机械手不能直接用于矿山井下生产。现在矿井下机械手以液压驱动为主,其尺寸大,结构笨重,开环控制,作业精度差,其只能减少部分生产人员数量,作业质量也有待进一步提高。
2、中国专利文献cn107803830a公开了一种七自由度力反馈液压驱动机械臂,该机械臂负载自重比大,自由度多,灵活性高。但该机械臂阀组安装在机械臂第一关节基座后,导致所有油管汇集到此处,当关节一旋转时,胶管会发生扭转扯动,且该机械臂不能用于煤矿井下防爆场合。
技术实现思路
1、针对现有技术存在的不足,本实用新型实施例的目的是提供一种矿用多关节闭环控制液压机械手。
2、为了实现上述目的,本实用新型实施例提供了如下技术方案:
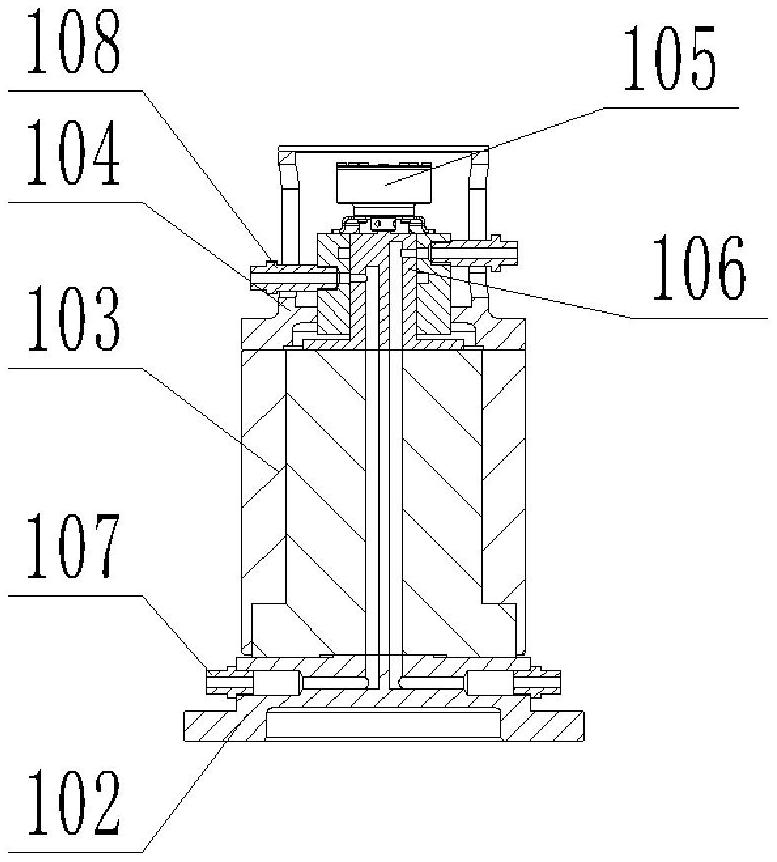
3、一种矿用多关节闭环控制液压机械手,包括:关节一组件和关节二组件,所述关节二组件的空腔内设置有阀组;所述关节一组件包括液压摆缸、旋转接头、传感器和连杆构件,所述液压摆缸包括缸体和旋转轴,所述旋转接头包括外套和转轴,所述传感器包括外壳和芯轴,所述缸体、连杆构件、外套和外壳依次连接,所述旋转轴、转轴和芯轴依次连接,所述外套通过管路与所述阀组连通。
4、可选的,所述关节二组件的空腔内设置有护板,所述护板具有两个,两个所述护板之间设置有支撑板,所述支撑板和两个护板围成容纳阀组的空腔。
5、可选的,所述阀组包括阀板、液压阀和阀接头,所述阀板安装在所述支撑板上,所述液压阀安装在所述阀板上,所述阀接头安装在所述阀板上,且接头与阀板、液压阀连通。
6、可选的,所述液压摆缸、传感器和连杆构件依次为关节一液压摆缸、关节一传感器和关节一连杆构件,所述关节一连杆构件安装在所述关节一液压摆缸上,所述旋转接头安装在所述关节一液压摆缸上,且旋转接头位于所述关节一连杆构件内,所述关节一传感器安装在所述旋转接头上,且关节一传感器位于所述关节一连杆构件内。
7、可选的,所述关节一液压摆缸底部设置有基座板,关节一液压摆缸的旋转轴连接在所述基座板上,关节一液压摆缸的缸体能够相对所述基座板转动。
8、可选的,所述基座板上设置有第一液压接头,所述旋转接头的外套上设置有第二液压接头,所述第一液压接头依次经过基座板、旋转轴、转轴和外套与所述第二液压接头连通,所述阀组上具有阀接头,所述第二液压接头通过管路与阀接头连通。
9、可选的,所述机械手还包括依次安装的关节二组件、关节三组件、关节四组件、关节五组件、关节六组件以及夹手,所述阀组通过管路分别与各关节连通。
10、可选的,所述关节二组件包括关节二缸尾端轴、关节二连杆构件、关节二旋转轴、关节二轴承、关节二闷盖、关节二护罩、关节二传感器、关节三闷盖、关节三旋转轴、关节三传感器、关节三护罩、关节二油缸、关节三缸尾端轴,关节二缸尾端轴安装在关节二连杆构件上,与关节二缸尾端相连;关节二旋转轴安装在关节一连杆构件上,通过关节二轴承与关节二连杆构件相连;关节二闷盖安装在关节二连杆构件上压紧轴承。
11、可选的,所述关节三组件包括关节三杆端轴、关节四缸尾端轴、关节三连杆构件、关节三闷盖、关节三轴承、关节四旋转轴、关节四传感器、关节四护罩、关节三油缸,关节四缸尾端轴安装在关节三连杆构件上,与关节四缸尾端相连;关节四旋转轴安装在关节四连杆构件上,通过关节三轴承与关节三连杆构件相连。
12、可选的,所述关节四组件包括关节四杆端轴、关节四连杆构件、关节四油缸,关节四杆端轴安装在关节四连杆构件上,与关节四油缸杆端相连。
13、本实用新型实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
14、本实用新型的机械手在关节一组件处安装旋转接头,而且将液压阀组集成在关节二组件的机械臂臂腔中,防止关节转动时液压胶管也跟随转动,进而避免扭管、扯管问题的发生。同时在转动关节处增加传感器,能够实时检测关节角度位置信息,反馈给机械臂控制器,形成闭环控制,能够从事精度比较高的作业任务。
15、本实用新型附加方面的优点将在下面的描述中给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:1.一种矿用多关节闭环控制液压机械手,其特征在于,包括:关节一组件和关节二组件,所述关节二组件的空腔内设置有阀组;
2.如权利要求1所述的矿用多关节闭环控制液压机械手,其特征在于,所述关节二组件的空腔内设置有护板,所述护板具有两个,两个所述护板之间设置有支撑板,所述支撑板和两个护板围成容纳阀组的空腔。
3.如权利要求2所述的矿用多关节闭环控制液压机械手,其特征在于,所述阀组包括阀板、液压阀和阀接头,所述阀板安装在所述支撑板上,所述液压阀安装在所述阀板上,所述阀接头安装在所述阀板上,且接头与阀板、液压阀连通。
4.如权利要求1所述的矿用多关节闭环控制液压机械手,其特征在于,所述液压摆缸、传感器和连杆构件依次为关节一液压摆缸、关节一传感器和关节一连杆构件,所述关节一连杆构件安装在所述关节一液压摆缸上,所述旋转接头安装在所述关节一液压摆缸上,且旋转接头位于所述关节一连杆构件内,所述关节一传感器安装在所述旋转接头上,且关节一传感器位于所述关节一连杆构件内。
5.如权利要求4所述的矿用多关节闭环控制液压机械手,其特征在于,所述关节一液压摆缸底部设置有基座板,关节一液压摆缸的旋转轴连接在所述基座板上,关节一液压摆缸的缸体能够相对所述基座板转动。
6.如权利要求5所述的矿用多关节闭环控制液压机械手,其特征在于,所述基座板上设置有第一液压接头,所述旋转接头的外套上设置有第二液压接头,所述第一液压接头依次经过基座板、旋转轴、转轴和外套与所述第二液压接头连通,所述阀组上具有阀接头,所述第二液压接头通过管路与阀接头连通。
7.如权利要求4所述的矿用多关节闭环控制液压机械手,其特征在于,所述机械手还包括依次安装的关节二组件、关节三组件、关节四组件、关节五组件、关节六组件以及夹手,所述阀组通过管路分别与各关节连通。
8.如权利要求7所述的矿用多关节闭环控制液压机械手,其特征在于,所述关节二组件包括关节二缸尾端轴、关节二连杆构件、关节二旋转轴、关节二轴承、关节二闷盖、关节二护罩、关节二传感器、关节三闷盖、关节三旋转轴、关节三传感器、关节三护罩、关节二油缸、关节三缸尾端轴,关节二缸尾端轴安装在关节二连杆构件上,与关节二缸尾端相连;关节二旋转轴安装在关节一连杆构件上,通过关节二轴承与关节二连杆构件相连;关节二闷盖安装在关节二连杆构件上压紧轴承。
9.如权利要求7所述的矿用多关节闭环控制液压机械手,其特征在于,所述关节三组件包括关节三杆端轴、关节四缸尾端轴、关节三连杆构件、关节三闷盖、关节三轴承、关节四旋转轴、关节四传感器、关节四护罩、关节三油缸,关节四缸尾端轴安装在关节三连杆构件上,与关节四缸尾端相连;关节四旋转轴安装在关节四连杆构件上,通过关节三轴承与关节三连杆构件相连。
10.如权利要求7所述的矿用多关节闭环控制液压机械手,其特征在于,所述关节四组件包括关节四杆端轴、关节四连杆构件、关节四油缸,关节四杆端轴安装在关节四连杆构件上,与关节四油缸杆端相连。
技术总结本技术涉及机械手技术领域,尤其涉及一种矿用多关节闭环控制液压机械手,包括:关节一组件和关节二组件,所述关节二组件的空腔内设置有阀组;所述关节一组件包括液压摆缸、旋转接头、传感器和连杆构件,所述液压摆缸包括缸体和旋转轴,所述旋转接头包括外套和转轴,所述传感器包括外壳和芯轴,所述缸体、连杆构件、外套和外壳依次连接,所述旋转轴、转轴和芯轴依次连接,所述外套通过管路与所述阀组连通。通过本技术避免了扭管、扯管问题的发生,能够实时检测关节角度位置信息,反馈给机械臂控制器,形成闭环控制,能够从事精度比较高的作业任务。技术研发人员:葛怀国,马德盛,张金钰受保护的技术使用者:山东优宝特智能机器人有限公司技术研发日:20231121技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51421.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表