一种自动清洁车及其运行系统
- 国知局
- 2024-07-09 16:54:26
本发明涉及自动驾驶及环卫车辆,具体涉及一种自动清洁车及其运行系统。
背景技术:
1、随着经济的发展,科学技术的不断进步,自动驾驶及环卫车辆技术应运而生,然而自动驾驶技术参差不齐,车辆装置也各有不同。如专利cn208363002u中涉及一种小型低速自动驾驶环卫清扫车,专利cn114991056a中涉及一种小型适用于非机动车道的无人驾驶垃圾自动清扫车,专利cn114281082a涉及一种无人驾驶环卫车辆,其能实现整车的无人驾驶和整车的无人控制自动作业。
2、专利cn114281082a中,一种无人驾驶环卫车辆设置有清扫系统、转向系统、各种传感器等,采用工控机技术控制整个车辆的运行与操作,以实现整车的无人驾驶和整车的无人控制自动作业。
3、然而,专利cn114281082a中,无人驾驶环卫车辆设置的操作系统较多,因而运行系统设置较为复杂,且专利cn114281082a中,未有详细的运行系统公开。
技术实现思路
1、本发明是为了解决无人驾驶环卫车辆结构设置合理、运行系统更流畅的问题,提供了一种自动清洁车及其运行系统。
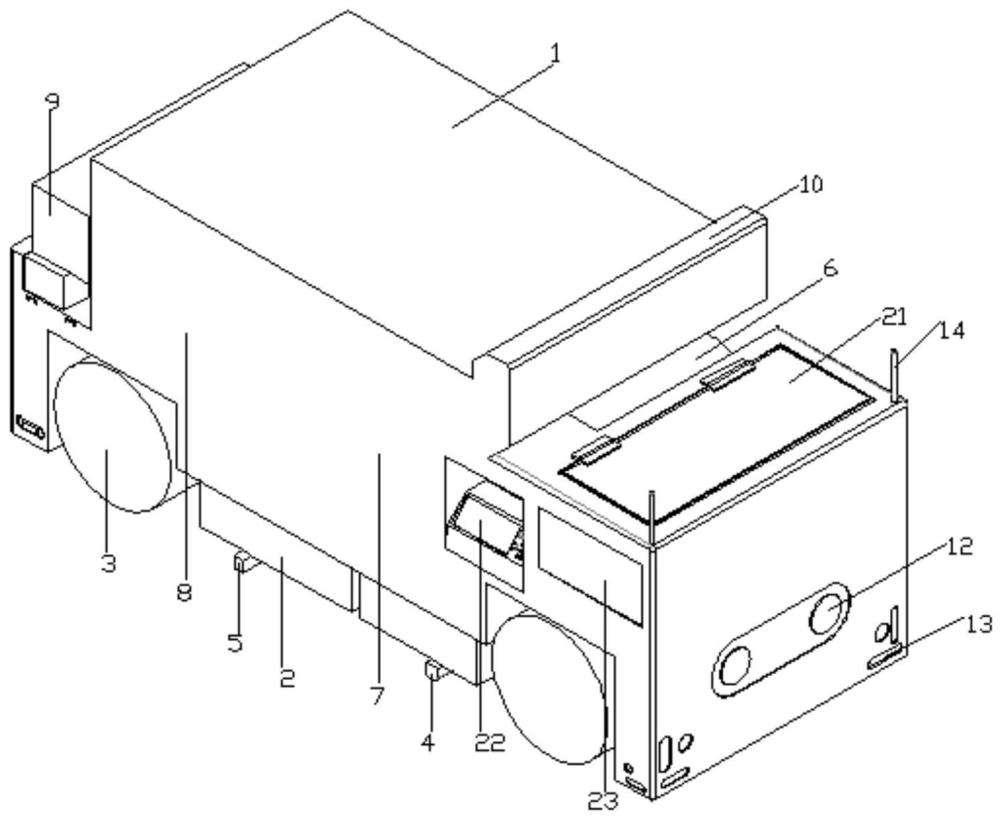
2、本发明提供一种自动清洁车,包括车厢,设置在所述车厢上的清洁机构、检测机构、控制机构和动力机构,与所述车厢连接的行进机构,所述控制机构用于控制所述行进机构、所述清洁机构和所述检测机构,所述清洁机构、所述检测机构、所述控制机构和所述行进机构均与所述动力机构电连接;
3、所述清洁机构包括依次设置于所述车厢底部的清洁刷、集物器、喷水器,依次设置于所述车厢中部的清洁液存放装置、水箱、集物箱,设置于所述车厢后部的清洁机械臂和设置于所述车厢顶部的水雾炮,所述集物器与所述集物箱相连,所述集物箱位于所述集物器上方,所述喷水器、所述清洁机械臂和所述水雾炮均与所述清洁液存放装置、所述水箱相连,所述水雾炮位于所述水箱上方;
4、所述控制机构包括设置于所述车厢前段侧壁上的操作控制装置和设置于所述车厢前段顶部的封装控制装置,所述操作控制装置与所述封装控制装置电连接;
5、所述检测机构包括设置于所述车厢壁上的摄像头、传感器、天线,所述摄像头、所述传感器和所述天线均与所述封装控制装置电连接。
6、本发明所述的一种自动清洁车,作为优选方式,所述清洁机械臂依次设置有高压水流喷出结构、前置滚刷结构、水流雾化喷出结构、后置滚刷结构、出风结构,所述高压水流喷出结构设置有高压水流喷出口,所述前置滚刷结构设置有前置滚刷,所述水流雾化喷出结构设置有水流雾化喷出口,所述后置滚刷结构设置有后置滚刷,所述出风结构设置有出风口,所述高压水流喷出结构、所述水流雾化喷出结构均与供水管路连接,所述前置滚刷结构、所述后置滚刷结构、所述出风结构均与驱动电机连接。
7、本发明所述的一种自动清洁车,作为优选方式,所述封装控制装置包括功能控制plc、自动驾驶plc和中继器,所述功能控制plc、所述自动驾驶plc均与所述中继器电连接,所述中继器与所述检测机构、所述操作控制装置电连接。
8、本发明所述的一种自动清洁车,作为优选方式,所述操作控制装置包括操作按钮、控制面板、指示灯和行车显示屏,所述操作按钮、所述指示灯和所述行车显示屏均与所述控制面板和所述封装控制装置电连接,所述控制面板与所述封装控制装置电连接。
9、一种自动清洁车运行系统,在所述控制面板内设置有主控芯片,所述主控芯片分别与所述功能控制plc的功能数据处理模块和所述自动驾驶plc的自动驾驶数据处理模块电连接;所述功能控制plc用于控制环境检测模块、清洁模块,所述检测机构与所述环境检测模块电连接,所述清洁机构与所述清洁模块电连接;所述自动驾驶plc控制车辆行进控制模块,所述车辆行进控制模块包括电机驱动模块、转向可编程模块,所述电机驱动模块、所述转向可编程模块均与所述行进机构电连接。
10、本发明所述的一种自动清洁车运行系统,作为优选方式,还设置有定位模块,所述定位模块与所述清洁模块、所述功能控制plc、所述自动驾驶plc和主控芯片电连接。
11、本发明所述的一种自动清洁车运行系统,作为优选方式,还设置有避障辅助模块,所述避障辅助模块与所述自动驾驶plc电连接,所述避障辅助模块包括视觉信号采集模块、距离判断模块、速度判断模块。
12、本发明所述的一种自动清洁车运行系统,作为优选方式,还设置有4g链路模块,所述4g链路模块与所述环境检测模块、所述清洁模块和所述车辆行进控制模块连接。
13、本发明在使用过程中,启动车辆及其运行系统,输入目的地,车辆会根据自主保存路径、定位模块、4g链路模块等进行路径规划,在行驶过程中,可根据需要开启环境检测模块,并进行相应的清洁工作,车辆在行驶过程中能够对车周围的障碍物体进行判断并规避,实现自动驾驶,到达目的地后,可进一步进行检测与清洁工作。
14、本发明具有以下优点:
15、(1)清洁机构设置合理,清洁更便捷。
16、(2)自动运行系统更加清晰流畅。
17、(3)设置有操作按钮、控制面板等,进一步方便对自动清洁车清洁及驾驶的控制和操作。
技术特征:1.一种自动清洁车,其特征在于:包括车厢(1),设置在所述车厢(1)上的清洁机构、检测机构、控制机构和动力机构(2),与所述车厢(1)连接的行进机构(3),所述控制机构用于控制所述行进机构(3)、所述清洁机构和所述检测机构,所述清洁机构、所述检测机构、所述控制机构和所述行进机构(3)均与所述动力机构(2)电连接;
2.根据权利要求1所述的一种自动清洁车,其特征在于:所述清洁机械臂(9)依次设置有高压水流喷出结构、前置滚刷结构、水流雾化喷出结构、后置滚刷结构、出风结构,所述高压水流喷出结构设置有高压水流喷出口(15),所述前置滚刷结构设置有前置滚刷(16),所述水流雾化喷出结构设置有水流雾化喷出口(17),所述后置滚刷结构设置有后置滚刷(18),所述出风结构设置有出风口(19),所述高压水流喷出结构、所述水流雾化喷出结构均与供水管路连接,所述前置滚刷结构、所述后置滚刷结构、所述出风结构均与驱动电机(20)连接。
3.根据权利要求1所述的一种自动清洁车,其特征在于:所述封装控制装置(21)包括功能控制plc、自动驾驶plc和中继器,所述功能控制plc、所述自动驾驶plc均与所述中继器电连接,所述中继器与所述检测机构、所述操作控制装置(22)电连接。
4.根据权利要求1所述的一种自动清洁车,其特征在于:所述操作控制装置(22)包括操作按钮、控制面板、指示灯和行车显示屏(23),所述操作按钮、所述指示灯和所述行车显示屏(23)均与所述控制面板和所述封装控制装置(21)电连接,所述控制面板与所述封装控制装置(21)电连接。
5.根据权利要求1-4任一所述的一种自动清洁车运行系统,其特征在于:在所述控制面板内设置有主控芯片,所述主控芯片分别与所述功能控制plc的功能数据处理模块和所述自动驾驶plc的自动驾驶数据处理模块电连接;所述功能控制plc用于控制环境检测模块、清洁模块,所述检测机构与所述环境检测模块电连接,所述清洁机构与所述清洁模块电连接;所述自动驾驶plc控制车辆行进控制模块,所述车辆行进控制模块包括电机驱动模块、转向可编程模块,所述电机驱动模块、所述转向可编程模块均与所述行进机构(3)电连接。
6.根据权利要求5所述的一种自动清洁车运行系统,其特征在于:还设置有定位模块,所述定位模块与所述清洁模块、所述功能控制plc、所述自动驾驶plc和主控芯片电连接。
7.根据权利要求5所述的一种自动清洁车运行系统,其特征在于:还设置有避障辅助模块,所述避障辅助模块与所述自动驾驶plc电连接,所述避障辅助模块包括视觉信号采集模块、距离判断模块、速度判断模块。
8.根据权利要求5所述的一种自动清洁车运行系统,其特征在于:还设置有4g链路模块,所述4g链路模块与所述环境检测模块、所述清洁模块和所述车辆行进控制模块连接。
技术总结一种自动清洁车及其运行系统,包括车厢,设置在所述车厢上的清洁机构、检测机构、控制机构和动力机构,与所述车厢连接的行进机构,所述控制机构用于控制所述行进机构、所述清洁机构和所述检测机构,所述清洁机构、所述检测机构、所述控制机构和所述行进机构均与所述动力机构电连接。本发明清洁机构设置合理,清洁更便捷;自动运行系统更加清晰流畅。技术研发人员:张洪峰,孙墨林,罗富臣,郎雨旸,刘云豪,黄海能,李佳慧受保护的技术使用者:北京科技大学天津学院技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/55563.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表