一种高速铁路轨道扣件自动拆装机器人的制作方法
- 国知局
- 2024-07-09 16:58:55
本发明涉及铁路轨道维护施工领域,特别是一种高速铁路轨道扣件自动拆装机器人。
背景技术:
1、在铁路轨道维护施工领域,铁路换轨作业是一项重要的工程。现有技术的缺陷是:施工机具小,参与人员多,作业效率低,劳动强度高。
2、中国专利cn212268627u提出了一种铁路扣件自动拆卸回收装置,其技术经济缺陷是:结构复杂,价格昂贵,机械定位速度慢,作业效率较低下。
技术实现思路
1、本发明的目的是要提供一种高速铁路轨道扣件自动拆装机器人,它能够可靠地实现机器人在轨道上智能移动,精准地通过机器人移动和制动实现自主定位,有效地实现铁路轨道扣件螺栓的自动拆装。
2、设计一种高速铁路轨道扣件自动拆装机器人,车架上设置有电动扳手总成、轮毂总成和控制系统;电动扳手总成由相互连接的定扭矩电动扳手、电动扳手控制器和电缸组成;轮毂总成由相互连接的车轮和轮毂电机组成;控制系统包括:相互连接的主控电脑、电池模块、电气控制箱模块、电缸控制器、电缸驱动器、轮毂电机驱动器和相机。
3、所述电气控制系统(3)的控制信号传输协议方式包括且不限于rs-232,rs-485,can,模拟信号,modbus,以太网。电气控制箱模块由电池模块供电,电气控制箱模块内部的主控电脑控制轮毂电机控制器,轮毂电机控制器控制轮毂电机运行,轮毂电机带动车轮转动,实现所述机器人在轨道上智能移动。
4、车架上安装相机,当机器人向前或向后运动时,相机开始捕捉铁轨周围环境并识别检测铁轨道钉,当相机初次捕捉到道钉后,将数据反馈到主控电脑,主控电脑根据人工智能机器视觉方法从相机所捕捉的内容进行道钉识别,然后主控电脑发出驱动指令,使得所述机器人向作业点移动,直至抵达作业点后进行制动,实现所述机器人的自主定位。
5、电动扳手总成设置有升降机构,电池模块给电气控制箱模块供电,电气控制箱模块内的主控电脑控制电缸控制器,电缸控制器控制电缸的运行,电缸的运行使定扭矩电动扳手实现自动升降;同时电气控制箱模块内部的主控电脑控制电动扳手控制器,电动扳手控制器控制定扭矩电动扳手的运行,实现所述机器人对扣件螺栓自动拆装。
6、本发明有益的技术效果是:由于电气控制箱模块内部的主控电脑依次控制轮毂电机控制器、轮毂电机控制器、轮毂电机、车轮,因而实现了所述机器人在轨道上智能移动。同时由于车架上的相机和主控电脑能够捕捉和识别道钉,因而可以驱动所述机器人通过移动和制动实现自主定位。另外由于电气控制箱模块、电缸控制器和电缸可以依次控制升降机构、电动扳手控制器和定扭矩电动扳手,因而可以实现所述机器人对扣件螺栓的自动拆装。本发明还具有结构优化简单、工程效率提高、维护成本低廉、施工质量可靠的优点。
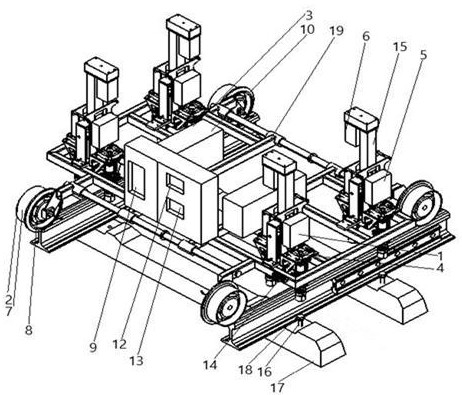
技术特征:1.一种高速铁路轨道扣件自动拆装机器人,其特征在于包括:车架(20)上设置有电动扳手总成(1)、轮毂总成(2)和控制系统(3);电动扳手总成(1)由相互连接的定扭矩电动扳手(4)、电动扳手控制器(5)和电缸(6)组成;轮毂总成(2)由相互连接的车轮(7)和轮毂电机(8)组成;控制系统(3)包括相互连接的主控电脑(9)、电池模块(10)、电气控制箱模块(11)、电缸控制器(12)、轮毂电机控制器(13)和相机(14)。
2.根据权利要求1所述的高速铁路轨道扣件自动拆装机器人,其特征是:电气控制箱模块(11)由电池模块(10)供电,电气控制箱模块(11)内部的主控电脑(9)控制轮毂电机控制器(13),轮毂电机控制器(13)控制轮毂电机(8)运行,轮毂电机(8)带动车轮(7)转动,实现所述机器人在轨道上智能移动。
3.根据权利要求1所述的高速铁路轨道扣件自动拆装机器人,其特征是:车架(19)上安装相机(14),当机器人向前或向后运动时,相机开始捕捉铁轨周围环境并识别检测铁轨道钉(16),当相机初次捕捉到道钉(16)后,将数据反馈到主控电脑(9),主控电脑(9)根据人工智能机器视觉方法从相机所捕捉的内容进行道钉(16)识别,然后主控电脑(9)发出驱动指令,使得所述机器人向作业点移动,直至抵达作业点后进行制动,实现所述机器人的自主定位。
4.根据权利要求1所述的高速铁路轨道扣件自动拆装机器人,其特征是:电动扳手总成(1)设置有升降机构(15),电池模块(10)给电气控制箱模块(11)供电,电气控制箱模块(11)内的主控电脑(9)控制电缸控制器(12),电缸控制器(12)控制电缸(6)的运行,电缸(12)的运行使定扭矩电动扳手(4)实现自动升降;同时电气控制箱模块(11)内部的主控电脑(9)控制电动扳手控制器(5),电动扳手控制器(5)控制定扭矩电动扳手(4)的运行,实现所述机器人对扣件螺栓(18)自动拆装。
5.根据权利要求6所述所述的高速铁路轨道扣件自动拆装机器人,其特征在于:所述电气控制系统(3)的控制信号传输协议方式包括且不限于rs-232,rs-485,can,模拟信号,modbus,以太网。
技术总结本发明是铁路轨道维护施工领域的一种高速铁路轨道扣件自动拆装机器人。车架上有电动扳手总成、轮毂总成和控制系统;电动扳手总成设置有定扭矩电动扳手、电动扳手控制器和电缸;轮毂总成有车轮和轮毂电机;控制系统设置有主控电脑、电池模块、电气控制箱模块、电缸控制器、轮毂电机驱动器和相机。主控电脑控制轮毂电机控制器、轮毂电机控制器、轮毂电机和车轮,实现机器人在轨智能移动。相机和主控电脑捕捉和识别道钉,驱动机器人通过移动和制动实现自主定位。电气控制箱模块、电缸控制器和升降机构、电动扳手控制器和定扭矩电动扳手,实现机器人对扣件螺栓的自动拆装。本发明具有结构优化简单、工程效率提高、维护成本低廉、施工质量可靠的优点。技术研发人员:蔡一杰,张伟,陈斌,刘学海,卢菲,古兴华,秦康,徐丽娟,陈胜,蔡尚衡受保护的技术使用者:金鹰重型工程机械股份有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/56119.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表