一种垂直提升锻造操作机主运动机构
- 国知局
- 2024-06-20 16:42:00
本发明涉及锻造设备,尤其涉及一种垂直提升锻造操作机主运动机构。
背景技术:
1、锻造操作机是自由锻造液压机组的重要辅助设备,也是国家重工业、核电、航空航天以及风能等事业发展急需的重大机械装备之一。其中,钳杆升降、钳杆俯仰和钳杆水平移动是锻造操作机需要提供的最主要的三个运动方向,这三个运动由锻造操作机的主运动机构实现。
2、目前使用比较广泛的大吨位锻造操作机主运动机构有平行连杆式机构和摆动杠杆式机构两种,其提升机构都采用四杆机构进行钳杆升降控制,由于四杆机构末端轨迹为近似直线,在锻造操作机主运动机构进行钳杆升降运动时,钳杆在水平方向会发生一定的位移,因此降低了操作机的控制精度。专利号为201410079956.5的中国专利公开了一种完全解耦式锻造操作机提升机构,其升降机构能实现钳杆的直线提升,但是,该机构的结构较为复杂,连杆数量较多,结构总体刚度较低,难以承载大型锻件。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种垂直提升锻造操作机主运动机构,结构简单且可实现垂直提升。
2、本发明采用的技术方案如下:
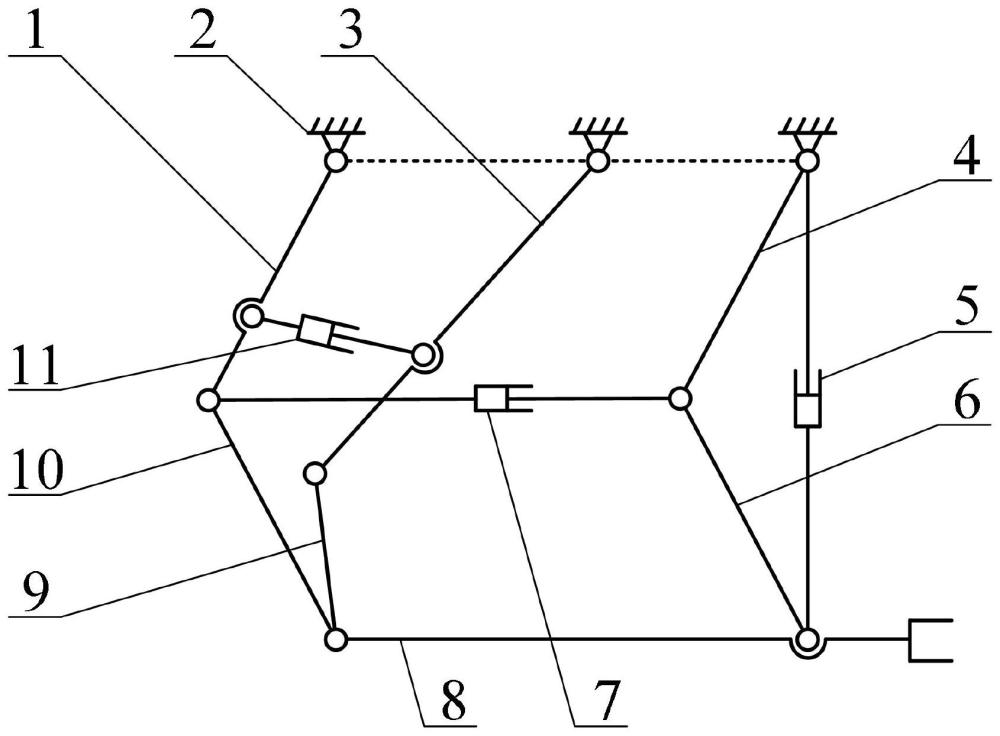
3、本发明所提出的一种垂直提升锻造操作机主运动机构,包括前提升杆、前同步杆、后提升杆、后同步杆、机架、连杆、定位连杆、钳杆、升降直线驱动器、俯仰直线驱动器和缓冲直线驱动器;所述钳杆前端通过铰链与前同步杆下端连接;所述前同步杆上端通过铰链与前提升杆下端连接;所述前提升杆上端通过铰链与机架前端连接;所述升降直线驱动器下端通过铰链与钳杆前端连接,上端通过铰链与机架前端连接;所述钳杆后端通过铰链与后同步杆下端连接;所述后同步杆上端通过铰链与后提升杆下端连接;所述后提升杆上端通过铰链与机架后端连接;所述定位连杆下端通过铰链与钳杆后端连接,上端通过铰链与连杆下端连接;所述连杆上端通过铰链与机架中前部连接;所述俯仰直线驱动器前端通过铰链与前提升杆和前同步杆的连接点连接,后端通过铰链与后提升杆和后同步杆的连接点连接;所述缓冲直线驱动器前端通过铰链与连杆中部连接,后端通过铰链与后提升杆中部连接。
4、进一步的,所述前提升杆、前同步杆、后提升杆和后同步杆的长度均相同。
5、进一步的,所述缓冲直线驱动器与连杆的连接点和连杆与定位连杆的连接点之间的杆长与定位连杆的杆长相同。
6、进一步的,所述缓冲直线驱动器与后提升杆的连接点和后提升杆与机架的连接点之间的杆长与缓冲直线驱动器长度相同。
7、进一步的,所述缓冲直线驱动器与连杆的连接点和连杆与机架的连接点之间的杆长与后提升杆与机架的连接点和连杆与机架的连接点之间的长度相同。
8、进一步的,所述钳杆处于最低点时,缓冲直线驱动器与连杆的连接点和连杆与定位连杆的连接点之间的连线与缓冲直线驱动器垂直。
9、进一步的,所述俯仰直线驱动器处于初始状态时,前提升杆与机架前端的连接点和后提升杆与机架后端的连接点之间的距离、钳杆与前同步杆的连接点和钳杆与后同步杆的连接点之间的杆长以及俯仰直线驱动器的杆长之间的长度比为1:1:1。
10、进一步的,所述缓冲直线驱动器、连杆、定位连杆、后提升杆、后同步杆与机架构成直线六杆机构,能够使钳杆沿直线运动;所述前提升杆、后提升杆、俯仰直线驱动器与机架构成四杆机构;所述前同步杆、后同步杆、俯仰直线驱动器与钳杆构成四杆机构。
11、本发明与现有技术相比具有以下有益效果:
12、本发明使用六连杆机构作为操作机直线提升装置,在钳杆升降时实现了垂直提升,在六连杆机构中设置水平缓冲直线驱动器,解决了直线六连杆机构无缓冲功能的缺点,而且结构布局简单,能够实现锻造操作机垂直提升、俯仰、缓冲等主运动功能。
技术特征:1.一种垂直提升锻造操作机主运动机构,其特征在于:包括前提升杆、前同步杆、后提升杆、后同步杆、机架、连杆、定位连杆、钳杆、升降直线驱动器、俯仰直线驱动器和缓冲直线驱动器;所述钳杆前端通过铰链与前同步杆下端连接;所述前同步杆上端通过铰链与前提升杆下端连接;所述前提升杆上端通过铰链与机架前端连接;所述升降直线驱动器下端通过铰链与钳杆前端连接,上端通过铰链与机架前端连接;所述钳杆后端通过铰链与后同步杆下端连接;所述后同步杆上端通过铰链与后提升杆下端连接;所述后提升杆上端通过铰链与机架后端连接;所述定位连杆下端通过铰链与钳杆后端连接,上端通过铰链与连杆下端连接;所述连杆上端通过铰链与机架中前部连接;所述俯仰直线驱动器前端通过铰链与前提升杆和前同步杆的连接点连接,后端通过铰链与后提升杆和后同步杆的连接点连接;所述缓冲直线驱动器前端通过铰链与连杆中部连接,后端通过铰链与后提升杆中部连接。
2.根据权利要求1所述的一种垂直提升锻造操作机主运动机构,其特征在于:所述前提升杆、前同步杆、后提升杆和后同步杆的长度均相同。
3.根据权利要求2所述的一种垂直提升锻造操作机主运动机构,其特征在于:所述缓冲直线驱动器与连杆的连接点和连杆与定位连杆的连接点之间的杆长与定位连杆的杆长相同。
4.根据权利要求3所述的一种垂直提升锻造操作机主运动机构,其特征在于:所述缓冲直线驱动器与后提升杆的连接点和后提升杆与机架的连接点之间的杆长与缓冲直线驱动器长度相同。
5.根据权利要求4所述的一种垂直提升锻造操作机主运动机构,其特征在于:所述缓冲直线驱动器与连杆的连接点和连杆与机架的连接点之间的杆长与后提升杆与机架的连接点和连杆与机架的连接点之间的长度相同。
6.根据权利要求5所述的一种垂直提升锻造操作机主运动机构,其特征在于:所述钳杆处于最低点时,缓冲直线驱动器与连杆的连接点和连杆与定位连杆的连接点之间的连线与缓冲直线驱动器垂直。
7.根据权利要求6所述的一种垂直提升锻造操作机主运动机构,其特征在于:所述俯仰直线驱动器处于初始状态时,前提升杆与机架前端的连接点和后提升杆与机架后端的连接点之间的距离、钳杆与前同步杆的连接点和钳杆与后同步杆的连接点之间的杆长以及俯仰直线驱动器的杆长之间的长度比为1:1:1。
8.根据权利要求1所述的一种垂直提升锻造操作机主运动机构,其特征在于:所述缓冲直线驱动器、连杆、定位连杆、后提升杆、后同步杆与机架构成直线六杆机构,能够使钳杆沿直线运动;所述前提升杆、后提升杆、俯仰直线驱动器与机架构成四杆机构;所述前同步杆、后同步杆、俯仰直线驱动器与钳杆构成四杆机构。
技术总结本发明涉及一种垂直提升锻造操作机主运动机构,包括前提升杆、前同步杆、后提升杆、后同步杆、机架、连杆、定位连杆、钳杆、升降直线驱动器、俯仰直线驱动器和缓冲直线驱动器。本发明使用六连杆机构作为操作机直线提升机构,在钳杆升降时实现了垂直提升,在六连杆机构中设置水平缓冲直线驱动器,解决了直线六连杆机构无缓冲功能的缺点,而且结构布局简单,能够实现锻造操作机垂直提升、俯仰、缓冲等主运动功能。技术研发人员:翟富刚,赵润远,王晓楠,何志强,邢杨涛受保护的技术使用者:燕山大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240618/14077.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表