基于声学信号的水轮机初生空化预警方法
- 国知局
- 2024-06-21 10:42:00
本发明属于水轮机,具体涉及基于声学信号的水轮机初生空化预警方法。
背景技术:
1、能源已成为当今世界各国经济发展最重要的制约因素和国际竞争的焦点问题,保护生态环境,发展清洁能源,改善电网稳定性及质量是未来电力工业新的发展方向。水电是公认的绿色环保能源,对于调节电网稳定性具有重要保障作用。作为水电系统中的核心换能部件,其稳定性对整个系统乃至电网的安全运行至关重要,但因其工况条件多变,偏工况下水轮机内部流态恶化,压强降低诱发空化空蚀,直接关系到水轮机的效率以及使用寿命。因此识别机组空化状态对于保障机组运行安全具有重要意义。
2、由于空化问题涉及到多个学科,耦合性较强,一直是人们研究的热点和难点。一般根据空化发展程度将水轮机运行状态分为无空化、初生空化、临界空化以及完全空化状态。而由于初生空化状态时产生的空泡数较临界空化和完全空化时较少,使得难以及时识别水轮机初生空化状态。目前尚无实际应用的在线监测设备,传统方法常通过观察转轮叶片上空泡对空化状态进行判别,这种人工目测观察法对观察者能力要求较高,效率较低且因观察位置不同可能会导致误判。现有技术常通过对空化信号提取简单的时频域特征并结合机器学习方法对水轮机空化状态进行判断,并没有结合水轮机空化原理,在空化现象识别精度及效率上有所欠缺。
技术实现思路
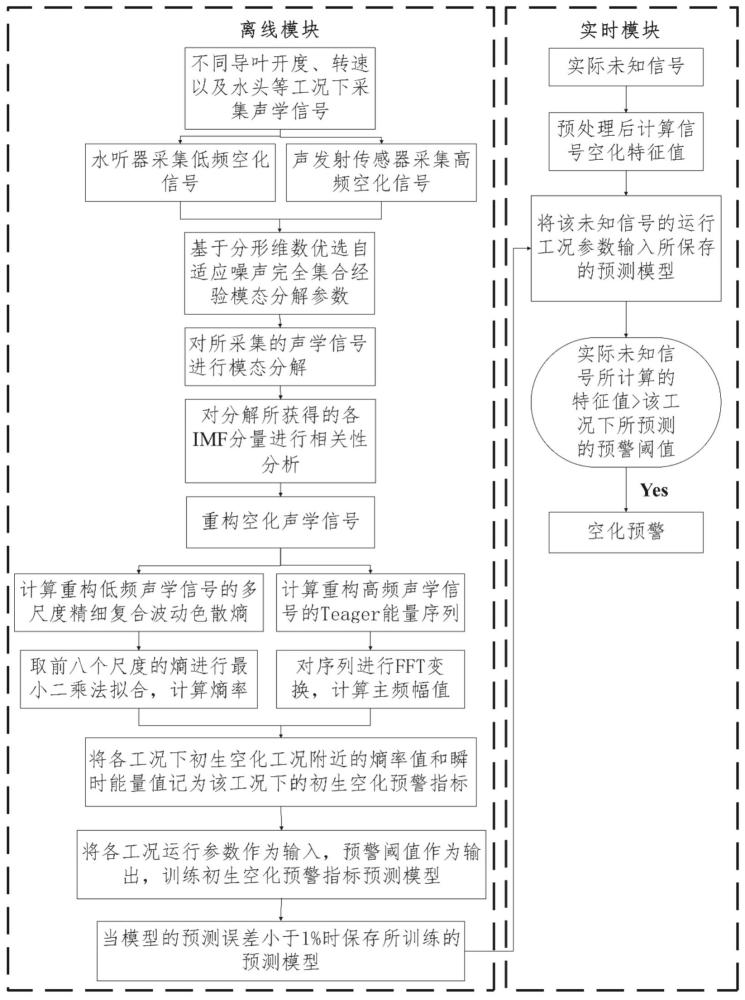
1、本发明的目的是提供基于声学信号的水轮机初生空化预警方法,采集低频和高频声学信号,利用改进降噪方法对所采集的声学信号进行降噪处理,基于空化原理分析空化状态与声学信号之间的关联特性,提出更有效的空化特征指标,可以有效解决强环境噪声干扰下空化识别不准确的问题。
2、本发明所采用的技术方案是,基于声学信号的水轮机初生空化预警方法,具体按照以下步骤实施:
3、步骤1、通过水轮机上安装的声学传感器获取空化声学信号数据集,包含各工况运行参数下无空化及空化状态下水轮机运行时的声学信号;
4、步骤2、对声学信号进行去噪处理,得到去噪声学信号;具体过程为:
5、步骤2.1、输入所采集的声学信号对应的时间序列,确定改进自适应噪声完全集合经验模态分解的最优白噪声幅值£和加噪次数ne;
6、步骤2.2、根据最优白噪声幅值£和加噪次数ne对采集的声学信号进行分解,获得k个imf分量;
7、步骤2.3、分别计算k个imf分量与分解前的声学信号之间的最大互信息系数,根据最大互信息系数对imf分量筛选、重构,得到去噪声学信号;
8、步骤3、计算低频空化声学信号熵率和高频空化声学信号的信号能量值;
9、步骤4、构建水轮机工况运行参数与初生空化声学信号预警特征值之间关系的预测模型,将水轮机工况运行参数作为输入数据,初生空化声学信号熵率和高频声学信号的信号能量值作为输出数据,每组输入数据及对应的输出数据作为训练样本训练预测模型;
10、步骤5、采集工况运行参数已知、空化状态未知状态的实况声学信号,计算实况声学信号的熵率和能量值,将实况声学信号对应的工况运行参数输入训练后的预测模型中获得熵率预警阈值与能量值的预警阈值;当实况声学信号的熵率超过熵率预警阈值或实况声学信号的能量值超过能量值的预警阈值,发出初生空化预警。
11、本发明的特点还在于:
12、工况运行参数包括导叶开度α0,转速n,水头h,下游水位hd、水轮机出力p和扭矩m。
13、步骤1具体过程为:在尾水管直锥段接近转轮出口处安装水听器与声发射传感器,其中水听器采样频率设置为60khz,声发射传感器采样频率设置为2mhz;固定水轮机的运行参数,并在不同的空化状态下利用水听器与声发射传感器同步采集水轮机空化声学信号,通过数据采集卡发送到计算机并记录声学信号对应时间,直至当转轮叶片上出现空泡时,将此状态判断为初生空化状态,通过水听器与声发射传感器采集声学信号,当一个工况的空化声学信号采集完成后,分别改变工况运行参数,获得不同工况下声学信号。
14、步骤2.1具体过程为:
15、步骤2.1.1、以白噪声幅值和加噪次数为粒子坐标,设定好坐标参数搜索范围,初始化粒子群算法参数;
16、步骤2.1.2、在当前白噪声幅值和加噪次数下,对所采集的声学信号序列进行自适应噪声完全集合经验模态分解,计算各imf分量的分形维数,将分形维数的和作为适应度函数;将初始粒子适应度作为个体最优值,粒子历史最优适应度值作为全局最优值;
17、步骤2.1.3、对粒子位置以及速度、粒子种群最优解进行更新,更新公式为:
18、
19、式中,是个体历史最优位置;是全局历史最优位置;是目前粒子位置,是下一次迭代的粒子速度即更新后的速度;w代表惯性权重,,分别取0.9和0.4, c1, c2为学习因子,,是(0,1)之间的随机数,下标 i, j表示第 i个粒子和第 j维, t代表迭代次数,表示最大进化代数,计算更新后的粒子适应度值,将当前粒子种群适应度值与个体最优值、全局最优值进行比较,更新粒子种群的个体最优以及全局最优极值;
20、步骤2.1.4、判断是否满足迭代条件,设置容忍度阈值、最大容忍代数,最大迭代次数,计算当前最优适应度与上一代最优适应度的相对变化量作为容忍度,比较容忍度与容忍度阈值大小,若前者小则容忍代数加1,判断容忍代数是否大于最大容忍代数或者迭代次数是否超过最大迭代次数,若满足,则输出目前全局最优解对应的白噪声幅值和加噪次数,作为最优白噪声幅值£和加噪次数ne,若不满足,则返回步骤2.1.3。
21、计算各imf分量的分形维数过程为:
22、设定imf分量序列c的时间序列为 x(t),t =1,2,, n, n表示整个时间序列的长度;构造新的以延迟时间 k为参数的时间序列表示为:
23、
24、将时间序列展开后计算时间序列矩阵的曲线长度lm(k),表示为:
25、
26、式中, n表示整个时间序列的长度,是归一化因子,[]表示对取整,上式由 k=1到循环计算,求得一个k值下所有 lm( k)的均值 l( k),在双对数坐标系下利用最小二乘法拟合与得到直线斜率即是imf分量的分形维数。
27、步骤2.3具体过程为:
28、计算imf分量与分解前的声学信号之间的最大互信息系数:
29、
30、
31、其中, x, y分别为imf分量和分解前的声学信号,表示 x与 y之间的互信息,表示变量间的联合概率密度,为变量间的最大互信息系数, b表示网格划分系数;
32、选择最大互信息系数前5阶imf分量重构声学信号,得到去噪声学信号。
33、步骤3具体过程为:
34、步骤3.1、将去噪声学信号进行粗粒化,粗粒化过程中不同的起点创建不同的时间序列,重构后声学序列的粗粒化序列为:
35、
36、其中, l为重构声学序列长度;τ为尺度因子, ub表示重构声学序列的第 b个值;
37、步骤3.2、计算粗粒化时间序列中色散模式π的平均概率;
38、
39、其中,色散模式π为重构空间中序列的组合形式,其中为不同起始点每个可能的色散模式的概率;
40、步骤3.3、计算色散模式概率平均值的色散熵:
41、
42、其中, c为类别个数, m为嵌入维数, d为时延长度;
43、步骤3.4、利用色散熵的前八个尺度的熵值进行最小二乘法拟合,得到的曲线斜率即为低频声学信号的熵率;
44、步骤3.5、由下式计算重构后的高频声学信号的teager能量算子序列,重构公式为:
45、
46、式中,表示teager能量算子序列的第 n个值,表示重构高频信号序列中的第 n个数,表示重构高频信号序列中的第 n+1个数,表示重构高频信号序列中的第 n-1个数;
47、对信号teager能量算子序列进行快速傅里叶变换,其主频幅值即为高频声学信号的信号能量值。
48、步骤3.2中不同起始点每个可能的色散模式的概率计算过程为:
49、对于每个粗粒化时间序列,通过下式将变量映射到{1,2,,c}各类别中:
50、
51、
52、式中,为序列的期望,为序列的标准差, round为取整函数, c为类别个数;表示通过正态累积分布函数变换后的累积概率值;
53、将嵌入向量映射种基于波动的色散模式中,则有:
54、
55、
56、式中 m为嵌入维数, d为时延长度。
57、每个可能的色散模式的概率由下式计算:
58、
59、式中, count是指映射至的模式个数,再除以嵌入维数为 m对应的嵌入向量总数即为色散模式的概率, n表示粗粒化序列长度。
60、步骤4中水轮机工况运行参数与初生空化声学信号预警特征值之间关系的预测模型为bigru深度学习模型,将水轮机每个工况运行参数作为输入数据,每个工况运行参数对应的初生空化声学信号熵率和高频声学信号的信号能量值作为输出数据,每个输入数据及对应的输出数据作为训练样本,对训练样本进行归一化处理后输入bigru深度学习模型,采用十折交叉验证与网格搜索优化预测模型的超参数、bigru层数、神经元个数以及学习率,当训练次数达到设定最大次数或模型误差小于1%时保存bigru深度学习模型,作为训练后的预测模型。
61、本发明有益效果是:
62、本发明基于声学信号的水轮机初生空化预警方法,基于改进降噪方法去除环境噪声干扰,通过分析声学信号随水轮机运行状态的变化规律,采用teager能量算子为提取旋转机械空化信号中的瞬态冲击特征提供了一种有效途径,可以有效增强信号的瞬态特征,适用于处理信号中的空泡溃灭冲击特征,即为瞬时能量理论。本发明基于信号复杂度与瞬时能量理论提出了更适合用于进行水轮机空化状态预警的特征指标,并结合bigru深度学习模型实现水轮机初生空化在线预警,适用范围广,可以有效解决强环境噪声干扰下空化识别不准确的问题。本发明中基于水轮机空化原理将空化信号瞬时能量、随机性和复杂性与空化状态之间的规律作为判断水轮机空化状态的依据,可以有效提高空化状态识别准确率。当空化未发生时,水轮机声学信号熵率与瞬时能量值随空化系数降低而缓慢增加,当水轮机内发生空化时,声学信号随机性与复杂性迅速增加,熵率与瞬时能量值迅速增大。应该是随着水轮机空化系数的进一步降低,空泡群会淹没声学信号信息,并由于空泡之间的共振作用吸收声波能量,使得熵率与瞬时能量值有所减小;当空化程度进一步加深,这种现象消失,熵率与瞬时能量值又开始迅速增加。
本文地址:https://www.jishuxx.com/zhuanli/20240618/21306.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。