一种站场停留车位置及车厢装载状态的检测方法与流程
- 国知局
- 2024-08-01 08:32:39
本发明属于铁路站场,具体涉及一种站场停留车位置及车厢装载状态的检测方法。
背景技术:
1、铁路站场是以车站为中心,线路的上行线和下行线两侧都设有进站信号机和出站信号机,站场是以两侧进站信号机为界,里面都属于站场。现有的站场停留车位置获取的方法包括人工打点方式、aei方式和雷达方式。
2、人工打点方式为当有新车列被牵入站场,站场内的作业人员利用手持装置,手持装置内含有定位模块,通过手持装置对车辆靠近机车的一端进行手动打点定位,发送车辆端位置到调度系统;
3、人工打点方式存在如下问题:
4、(1)打点采用人工方式,打点位置难以保证准确,且存在忘记打点的情况;
5、(2)打点位置只在车列的一端,车列长度无法获取;
6、(3)各车厢的装载状态无法获取,不知道是重车、空车;
7、(4)各车厢内装货的要求是否达标也无法获取;
8、(5)人工工作量大,效率低。
9、aei方式为在车厢上加装电子标签,同时在入场和出厂位置设置电子标签识别装置,由牵入和牵出的车辆综合判断当前股道内的车辆数目,并根据车辆数目和车型计算车长;
10、aei方式存在如下问题
11、(1)只能计算当前股道的停车数量和车长,无法判断车列停留的精确位置;
12、(2)施工量大,需要在每节车厢上加装电子标签,在每条股道安装识别装置;
13、(3)各车厢的装载状态无法获取,不知道是重车、空车;
14、(4)各车厢内装货的要求是否达标也无法获取;
15、(5)一旦一次识别错误,后续车列的识别将一直存在错误,例如某次出站有一节车厢因为电子标签识别故障,则在系统中记录本股道一直存在一节车。
16、雷达方式为在股道的一侧布置多台激光雷达,根据雷达数据实时分析股道存车的位置和长度。
17、雷达方式存在如下:
18、(1)只能在最外侧股道实施此方案,因为在多条股道的站场中,中间股道间距一般不超过5m,因此很难用少量雷达实现几百米范围内的探测;
19、(2)施工量大,需要在每条股道上部署;
20、(3)各车厢的装载状态无法获取,不知道是重车、空车;
21、(4)各车厢内装货的要求是否达标也无法获取。
22、现有技术中获取的停留车位置不精准,且无法识别车厢的装载状态。
技术实现思路
1、为解决上述技术问题,本发明提供一种站场停留车位置及车厢装载状态的检测方法。
2、具体方案如下:
3、一种站场停留车位置及车厢装载状态的检测方法,包括如下步骤,
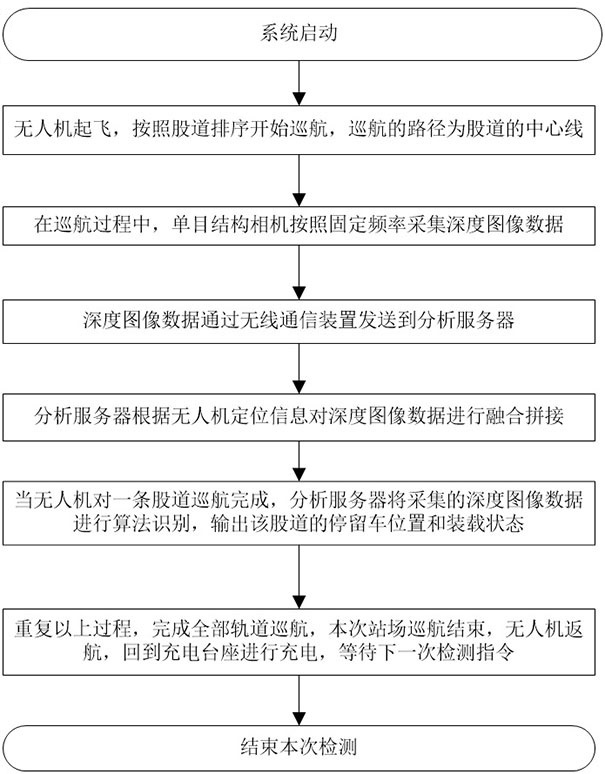
4、s1):将无人机按照股道排序开始巡航,巡航的路径为股道的中心线;
5、s2):在巡航过程中,无人机上搭载的单目结构光相机按照固定频率采集深度图像数据;
6、s3):深度图像数据通过无线通信装载发送到分析服务器;
7、s4):分析服务器根据无人机定位信息对深度图像数据进行融合拼接;
8、s5):无人机对一条股道巡航完成时,分析服务器将采集的深度图像数据进行算法识别,输出所巡航股道的停留车位置和装载状态;
9、s6):按照股道顺序,重复步骤s2)至s5)直至完成全部股道的巡航。
10、无人机在股道上巡航时,采用深度图像数据进行无人机航线校验,实时矫正无人机飞行位置的误差。
11、实时矫正无人机飞行位置误差的方法,包括如下步骤,
12、t1):分析服务器采用双边滤波器对当前帧的深度图像数据进行噪声抑制;
13、t2):计算深度图像灰度的最大值,将最大值作为图像灰度的零点进行深度图像的空间变换;所述图像灰度的最大值为地面数据;
14、t3):深度图像空间变换后,计算转换后深度图像灰度的最大值,转换后深度图像灰度的最大值为轨道高度或车厢顶部高度;
15、t4):对转换后的深度图像使用sobel算法,计算转换后深度图像的梯度;
16、t5):依据梯度进行阈值分割,形成连通阈;
17、t6):对连通阈使用矩形凸包检测算法,根据矩形的长度和面积特征剔除干扰区域;
18、t7):计算筛选后的矩形中心的行坐标,计算当前中心行坐标与巡航路径的起点中心航坐标的偏差值,将所述偏差值作为偏航的矫正值,依据矫正值对无人机航线进行矫正。
19、对深度图像进行融合拼接,包括以下步骤,
20、s41):根据任意两帧深度图像数据拍摄时的定位信息,计算两帧深度图像间的重合区域;
21、s42):使用两帧深度图像间的重合区域的数据分别在两帧深度图像上生成掩膜;
22、s43):在所述掩膜区域使用sift配准算法,计算出两帧图像的变换参数;
23、s44):采用变换矩阵完成两帧图像的拼接融合。
24、停留车位置识别方法,包括如下步骤:
25、p1):对融合拼接后的深度图像计算深度图像灰度的最大值graymax;
26、p2):采用阈值分割算法对融合拼接后的深度图像进行分割,其中,阈值分割最小值为1/3*graymax,阈值分割的最大值为graymax;
27、p3):使用连通阈检测算法检测分割后区域的连通域;
28、p4):使用区域面积特征过滤算法,提取出干扰区域,使用区域长度特征过滤算法,筛选出车辆区域;
29、p5):计算连通域的数量,所述连通阈的数量即为停留的车辆数量;
30、p6):对筛选出的车辆区域取并集运算,是的筛选出的车辆区域合并为一个区域;
31、p7):计算合并后区域的最大列坐标colummax和最小列坐标colummin,根据图像的定位数据、最大列坐标colummax和最小列坐标colummin计算出停留车辆的最前端的经纬度坐标和最末端的经纬度坐标,即为停留车的位置。
32、停留车装载状态识别方法包括如下步骤:
33、q1):根据步骤p1)至p4)获取车辆区域,计算各车辆区域的重心坐标;
34、q2):根据重心坐标的列标进行排序;
35、q3):按照排序,分别计算车辆的体积;
36、q4):对车辆进行矩形凸包检测算法,近似拟合车辆的外轮廓;
37、q5):使用自适应网格的有限元法计算车辆的体积。
38、使用自适应网络的有限元法计算车辆的体积包括如下步骤,
39、q51):对车辆区域进行固定网格划分;
40、q52):计算各网格内的图像灰度的均方差;
41、q53):判断均方差是否超过设定值σ0,若超过则对网格继续进行划分,并形成四个子网格;
42、q54):计算子网格内图像灰度的均方差,判断子网格内的图像灰度的均方差是否超过设定值σ0,若超过则继续将网格划分为四个子网格,直至均方差小于设定值σ0;
43、q55):计算网格内图像的灰度均值graymean,并获取网格的体积,所述网格的体积等于网格的像素面积与网格内图像的灰度均值graymean的乘积;
44、q56):完成车辆图像上全部网格区域的体积计算并求和,即可得到车辆的体积;
45、q57):根据车辆体积输出车辆的装载状态。。
46、本发明公开了一种站场停留车位置及车厢装载状态的检测方法,采用无人机和激光雷达对站场巡航扫描的方式实现站场内的数据采集,并对采集的数据进行算法识别,实现站场停留车的厘米级定位,厘米级的车列计算、精确装载状;具有车列定位精度高、车列长度计算精准和装载状态识别精准的优点。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232220.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。