无人驾驶列车休眠请求控制方法与流程
- 国知局
- 2024-08-01 08:39:26
本发明实施例涉及列车控制,具体而言涉及一种无人驾驶列车休眠请求控制方法。
背景技术:
1、目前列车中全自动无人驾驶技术,在正常运营情况下,由自动化设备取代司机自动驾驶列车在全线运行。目前现有方案中,车辆大多采用司机值守的列车运营方式,列车停止正线运营服务后,由司机操作列车回库和列车断电,并需专门的人员进行列车维护和检修状态的检测;另外目前的无人驾驶列车休眠设计注重从信号系统角度以及信号与行车综合自动化系统(tias)控制过程角度考虑列车休眠,而缺少从车辆及车辆控制管理系统(简称tcms)去实现车辆休眠过程的控制方法。目前采用的方法中,存在下述缺点:
2、1)网络智能化控制程度不高,车辆停止正线服务和断电由信号系统或人工通过硬线控制实现,tcms系统几乎不参与。
3、2)网络自动化诊断程度不高,车辆断电前的状态检查主要通过人工检查,无法实现远程控制自动测试,无法为无人驾驶车辆再次唤醒提供准备工作。
4、3)维护和运营成本高,设备检查等一系列的回库后检查工作需要花费较多的人力和物力。
技术实现思路
1、为了解决上述问题,本发明实施例提供了一种无人驾驶列车休眠请求控制方法。
2、本发明实施例提供了一种无人驾驶列车休眠请求控制方法,包括:
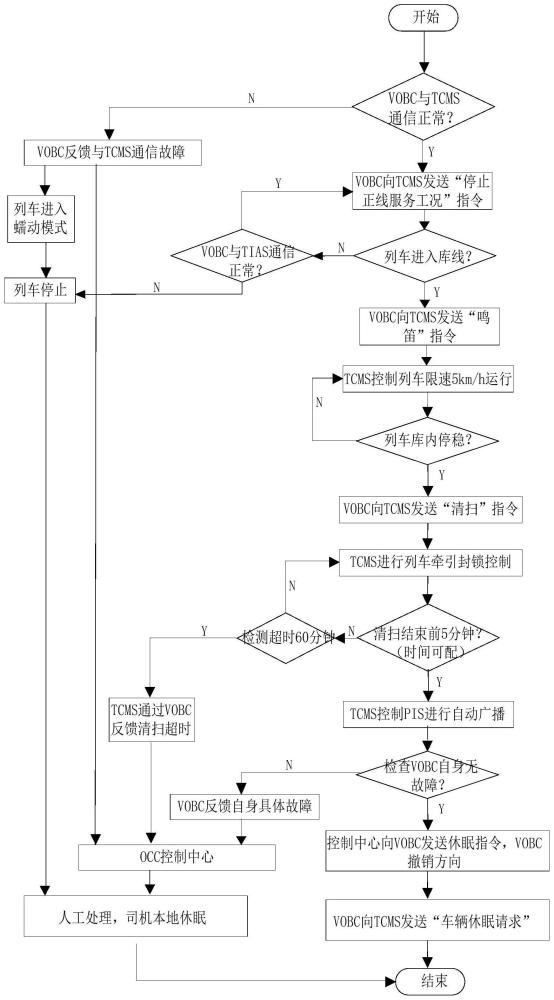
3、若确定列车进入停止正线服务的状态,判断vobc与车辆tcms之间是否通信正常;
4、若vobc与车辆tcms之间通信正常,则vobc向车辆tcms发送停止正线服务工况指令,列车以正线服务运行模式控制列车运行至回库;
5、列车进入库线后,vobc向tcms发送鸣笛指令,tcms通过do输出控制车辆鸣笛,并同时控制列车限速,tcms将限速定值指令发送给列车牵引系统控制单元(tcu),tcu控制牵引电机转速,实现列车库内低速运行直至列车停稳;
6、列车停稳后,vobc向tcms发送清扫指令,tcms根据清扫指令封锁列车牵引,以防止清扫过程中列车移动,tcms根据清扫指令计时,并在清扫结束前设定时长内向车辆乘客信息系统(pis)发送自动广播指令,pis系统根据预录制信息进行列车广播,以提醒清扫人员及时下车;
7、若在规定清扫时间内,vobc仍向tcms发送清扫指令,则tcms通过vobc向控制中心反馈清扫超时故障,等待控制中心人工处理;
8、清扫结束,并且vobc检测自身系统无故障,则通过vobc向车辆tcms发送车辆休眠请求。
9、可选的,所述方法还包括:
10、若vobc与车辆tcms之间发生通信故障,则vobc将向控制中心请求进入蠕动模式(cam),控制中心确认后,列车以蠕动模式停在转换轨或正线存车线、终端折返轨不发车,等待人工处理。
11、可选的,所述方法还包括:
12、在车辆进入休眠请求准备条件的控制过程中,如果出现故障或其他不满足条件,则车载vobc向控制中心反馈列车不满足休眠条件的原因及结果。
13、可选的,所述方法还包括:
14、列车tcms在收到vobc发送的“车辆休眠请求”后,检测车辆是否进入允许休眠状态,若车辆进入允许休眠状态,控制车辆休眠。
15、可选的,所述检测车辆是否进入允许休眠状态,包括:
16、判断休眠请求指令是否有效;
17、若休眠请求指令有效,判断列车是否处于fam模式;
18、若列车处于fam模式,tcms对列车进行状态检查;
19、判断列车是否处于检修状态;
20、若列车未处于检修状态,判断列车是否处于紧急牵引/cam模式;
21、若列车未处于紧急牵引/cam模式,判断列车是否处于零速状态;
22、若列车处于零速状态,判断列车司机室钥匙是否处于off位;
23、若列车司机室钥匙处于off位,判断tcms与车载各子系统是否通信正常;
24、若tcms与车载各子系统通信正常,tcms向车载各子系统控制单元发“休眠”指令;
25、判断车载各子系统是否均无故障;
26、若车载各子系统均无故障,车载各子系统向tcms向发送允许休眠信息;
27、tcms进入高压断电休眠控制过程。
28、可选的,所述方法还包括:
29、若列车未处于fam模式、列车处于检修状态、列车处于紧急牵引/cam模式、列车未处于零速状态、列车司机室钥匙未处于off位,确定车辆状态不满足tcms发出休眠指令的条件;
30、tcms通过vobc向控制中心occ反馈列车休眠故障。
31、可选的,所述方法还包括:
32、若tcms与车载各子系统通信故障,tcms诊断出子系统出现通信故障;
33、tcms通过vobc向控制中心occ反馈列车休眠故障。
34、可选的,所述方法还包括:
35、若tcms与车载各子系统通信故障,检测时间超过2秒(时间可调),tcms诊断出子系统出现通信故障;
36、tcms通过vobc向控制中心occ反馈列车休眠故障。
37、可选的,所述方法还包括:
38、若并非车载各子系统均无故障,车载各子系统反馈或tcms诊断子系统休眠故障;
39、tcms通过vobc向控制中心occ反馈列车休眠故障。
40、可选的,所述方法还包括:
41、若并非车载各子系统均无故障,检测时间超过30秒(时间可调),车载各子系统反馈或tcms诊断子系统休眠故障;
42、tcms通过vobc向控制中心occ反馈列车休眠故障。
43、本技术实施例由于采用以上技术方案,具有以下技术效果:
44、本发明实施例提供了一种无人驾驶列车休眠请求控制方法,列车在完成正线运营服务任务后,准备进入车辆休眠请求状态之前,列车需先完成停止正线服务、回库、清扫等进入休眠请求的准备工作。若确定列车进入停止正线服务的状态,判断vobc与车辆tcms之间是否通信正常,vobc向车辆tcms发送停止正线服务工况指令,列车以正线服务运行模式控制列车运行至回库。列车进入库线后,vobc向tcms发送鸣笛指令,tcms通过do输出控制车辆鸣笛,并同时控制列车限速,tcms将限速定值指令发送给列车牵引系统控制单元(tcu),tcu控制牵引电机转速,实现列车库内低速运行直至列车停稳;若控制中心检测到列车回库,控制中心给列车中的车载控制单元的辅助驾驶模块发送休眠指令;车载控制单元的辅助驾驶模块收到休眠指令后,向列车的车辆控制管理系统发送车辆休眠请求;车辆控制管理系统收到车辆休眠请求后,判断列车是否满足休眠准备条件,若是,控制列车进行休眠准备;车辆控制管理系统检查列车的休眠准备情况,若休眠准备情况为完成状态,控制列车进行休眠,对列车休眠准备情况进行汇总,得到休眠准备结果,将休眠准备结果发送给车载控制单元;车载控制单元将车辆休眠准备结果发送给控制中心。实现了在列车回库后进行自动检测及自动休眠控制,且控制休眠的准确性、可靠性高。
45、基于上述的方案,解决了无人驾驶列车自动控制休眠的列车控制技术问题,提高了网络智能化控制程度和网络自动化诊断程,为列车全自动无人驾驶自动唤醒提供前提保障,进而实现列车指挥自动化、运行高效化和技术先进化。同时,通过tcms参与控制全自动无人驾驶车辆停止正线运营服务、回库清扫、休眠请求等一系列的自动化控制和自诊断功能,减少了列车硬线布置,为列车减重和布线简易提供了可能。另外,无人驾驶列车远程休眠过程不需要人员登车检查,而是按照精益控制流程进行车辆设备及回库后列休眠请求控制,形成了标准化和模块化的无人驾驶列车休眠请求控制方法,降低了人工操作风险。还有,网络智能化程度高,通过地面控制中心统一管理调度,实现了车辆控制的智能化和无指化,同时有效提高了系统全自动管理效率。再有,无人驾驶列车休眠请求控制方法自动化程度较高,节省了人力、物力。虽然初期建设成本较普通列车要高,但维护成本低,降低了运营成本。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232713.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表