一种铁路机车司控器故障应急控制系统及方法与流程
- 国知局
- 2024-08-01 08:43:52
本发明属于铁路机车控制领域,具体而言,涉及一种铁路机车司控器故障应急控制系统及方法。
背景技术:
1、司控器作为机车“油门”和“电刹车”,承载着控制机车实现牵引、电制等多重作用,其一系列功能通过其内部多个微动开关触点信号以及电位器电压信号共同控制实现。
2、司控器触点信号由远程输入输出单元riom的数字量输入模块采集。司控器手柄所在位置由中央控制单元mpu根据触点信号判断,分为牵引区间、电制区间和零位三部分。其中,牵引区间包含t1/3、t2/3、t三个触点信号,电制区间包含b1/3、b2/3、b三个触点信号,零位包含1个触点信号。当司控器处于相应区间时,微动开关动作,对应触点信号有效。
3、司控器电位器电压信号由远程输入输出单元riom的模拟量采集模块采集。模拟量采集模块为司控器提供电压源,同时采集司控器电位器分压信号,司控器手柄动作时电位器电压值随之发生变化,对应牵引/电制级位随之发生变化。司控器牵引/电制级位由中央控制单元mpu根据触点信号和电位器电压信号综合判断。触点信号表征牵引/电制区间,电位器电压信号表征级位大小。远程输入输出单元riom采集触点信号和电位器电压信号,然后通过多功能车辆总线mvb传送给中央控制单元mpu,中央控制单元mpu根据去电信号区间和电压值大小计算牵引/电制级位,然后通过多功能车辆总线mvb传送给牵引控制单元tcu进行牵引/电制控制。电压越大,则级位越高,对应牵引/电制力越大。然而,机车运行过程中,司控器微动开关、电位器及采集模块一直处于工作状态,时常出现异常情况。该类故障导致机车无法获得正常级位,只能被迫停车。
4、当出现司控器故障时,机车无法获得正常级位,只能被迫停车,等待其他机车救援,没有有效的应急控制方法,严重影响机车运用效率。同时故障机车占用铁路线路,影响其他机车正常运用。
5、目前,司控器出现故障时,机车无法获得牵引/电制级位信息,失去了动力源,只能被迫停车,等待其他机车救援。
6、针对铁路机车司控器故障情况,目前并没有有效的应急控制方法。
技术实现思路
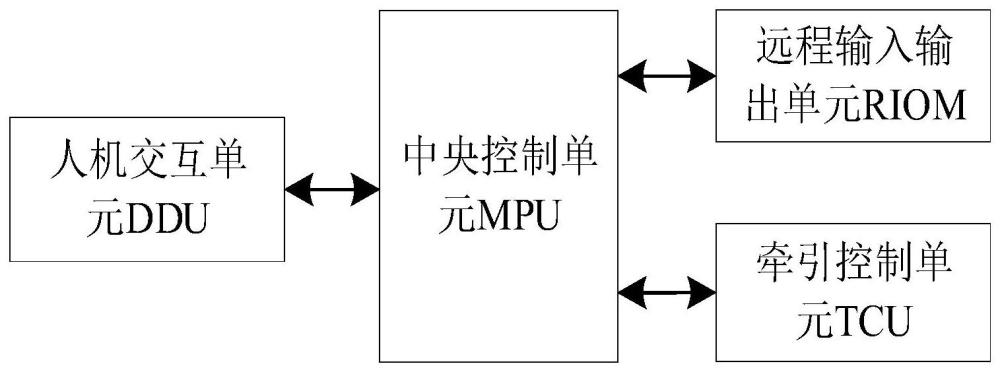
1、为了解决对司控器故障导致机车无法继续行驶问题,本发明采用的技术方案是:一种铁路机车司控器故障应急控制系统,包括:
2、远程输入输出单元riom,用于获取集司控器触点信号及电位器电压信号、驱动开关信号;
3、中央控制单元mpu,用于基于司控器触点信号及电位器电压信号监测司控器健康状态,判断是否满足应急模式行车条件,当满足应急模式行车条件时,进入司控器应急模式;
4、人机交互单元ddu,用于实现虚拟司控器功能,获取司控器的位置区间指令及司控器级位指令,同时实时显示机车状态;
5、牵引控制单元tcu,执行牵引/电制指令及司控器级位,发出电机转矩控制信号,控制电机转矩;
6、所述中央控制单元mpu分别与远程输入输出单元riom,人机交互单元ddu,牵引控制单元tcu通过总线双向信号连接。
7、进一步地,所述中央控制单元mpu包括司控器健康状态监测模块和级位运算模块;
8、所述远程输入输出单元riom包括模拟量采集模块和数字量采集模块;
9、所述司控器健康状态监测模块用于监测司控器健康状态,对司控器是否故障进行判断,并通过人机交互单元进行提示,判断过程如下:
10、所述级位运算模块在正常工况下根据模拟量采集模块采集的电压信号进行级位计算,在应急控制模式下,根据人机交互单元的虚拟司控器信号进行级位计算,并将最终级位发送给牵引控制单元进行牵引制动控制。
11、进一步地,所述监测司控器健康状态,对司控器是否故障进行判断,并通过人机交互单元进行提示的过程如下:
12、(2)司控器牵引区间,包括1/3t牵引区间、2/3t牵引区间、t牵引区间或制动区间包括1/3b制动区间,2/3b制动区间,b制动区间,触点信号有效时,模拟量采集模块采集的司控器级位信号与触点对应的级位范围相差较大持续固定时间,依据判断依据,判定为司控器故障,同时在显示屏进行故障提示;
13、(2)司控器在“零”位时,模拟量采集模块采集司控器级位信号大于1级,持续3s后判定为司控器故障,同时在显示屏进行故障提示。
14、进一步地,所述判断依据如下:
15、1/3t牵引区间或1/3b制动区间触点有效,2/3t牵引区间或2/3b制动区间触点还未有效时,但是级位已达到5级左右;
16、或者2/3t牵引区间或2/3b制动区间触点有效,t牵引区间或b制动区间触点还未有效时,但是级位已达到10级左右;
17、或者2/3t牵引区间或2/3b制动区间触点有效时,但是级位还未达到1级左右;或者t牵引区间或b制动区间触点有效时,但是级位还未达到3级左右;
18、进一步地,所述中央控制单元mpu还包括应急模式激活判定模块,判定机车运行状态是否满足机车操纵端电钥匙激活、司机控制器零位,均满足则允许激活应急模式。
19、进一步地,所述中央控制单元mpu还包括应急模式退出判定模块,判定机车运行状态是否满足机车静止、操纵段电钥匙激活、司机控制器零位,均满足则允许退出应急模式。
20、根据所述的铁路机车司控器故障应急控制方法,包括以下步骤:
21、s0、通过中央控制单元mpu的司控器健康状态监测模块对司控器是否故障进行判断,当判断出司控器故障时,通过人机交互单元进行提示,司控器故障情况下,机车无法根据司控器计算级位,此时通过人机交互单元ddu手动设置进入应急模式;
22、s1、通过中央控制单元mpu的司控器故障应急模式激活判定模块,判定机车运行状态是否满足机车操纵端电钥匙激活、司机控制器零位,均满足则允许激活应急模式;
23、s2、通过人机交互单元ddu的应急模式激活按钮来激活应急模式,机车进入应急模式后,根据人机交互单元ddu应急模式虚拟司控器进行级位控制,应急模式虚拟司控器分为司控器位置区间按钮和级位控制按钮,司控器位置区间按钮分为司控器牵引位、司控器电制位、司控器零位;级位控制按钮分为级位增加、级位保持、级位减少,首先点选司控器位置区间按钮确定机车牵引/电制工况,然后点选级位控制按钮,此时中央控制单元mpu控制级位自动增加/减少/保持,并将级位发送给牵引控制单元tcu进行牵引/电制控制;
24、s3、通过中央控制单元mpu的司控器故障应急模式退出判定模块,判定机车运行状态是否满足机车静止、操纵端电钥匙激活、司机控制器零位,均满足则允许退出应急模式;
25、s4、通过人机交互单元ddu的应急模式退出按钮来退出应急模式。
26、本发明提供的一种铁路机车司控器故障应急控制系统及方法,当司控器无法使用时,由控制方法中定义的虚拟司控器通过软件实现司控器级位自动增加、减少或维持,能够使司乘人员在司控器出现故障时进行快速高效的应急处理,缩短故障处理时间,使机车继续维持运行,降低因机车停车造成的影响和故障救援成本,使机车运用更加高效和经济。该方法可以解决司控器故障时无法继续行车的问题,提高机车应急处理效率,降低故障处理时间和救援成本,避免停车或机破故障发生,使机车运用更加经济高效。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233019.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表