一种无人运输矿车用弯道转弯用协助装置的制作方法
- 国知局
- 2024-08-01 08:43:45
本发明涉及矿材运输,尤其涉及一种无人运输矿车用弯道转弯用协助装置。
背景技术:
1、矿车是矿山中输送煤、矿石和废石等散状物料的窄轨铁路搬运车辆,一般须用机车或绞车牵引。矿车按结构和卸载方式不同分为:固定式矿车(材料车、平板车)、翻斗式矿车、单侧曲轨侧卸式矿车、底(侧)卸式矿车和梭式矿车共5大类;无人运输矿车是指通过纯机械遥控或调试操作进行无人驾驶的矿车,来进行运输矿材。
2、现有无人运输矿车在进行运输移动过程中多通过程序设定或远程遥控进行调节运输速度,在直线行平缓驶过程中多为相对加速状态,转弯时多通过相对减速状态以保持行驶过程的稳定性,上述两种操作方式多为遥控及传感检测方式,都需要进行信号传输,同时在矿坑内型号传输收到影响且都具有成本高的特点,因此如何提出一种机械化直线轨道匀速、弯道转弯减速的协助装置就显得尤为重要;鉴于此,我们提出一种无人运输矿车用弯道转弯用协助装置。
技术实现思路
1、本发明的目的在于克服现有技术的不足,适应现实需要,提供一种无人运输矿车用弯道转弯用协助装置,以解决当前无人运输矿车多通过信号传输、高科技监测方式协助减速转弯带来的高成本及信号传输不稳定的技术问题。
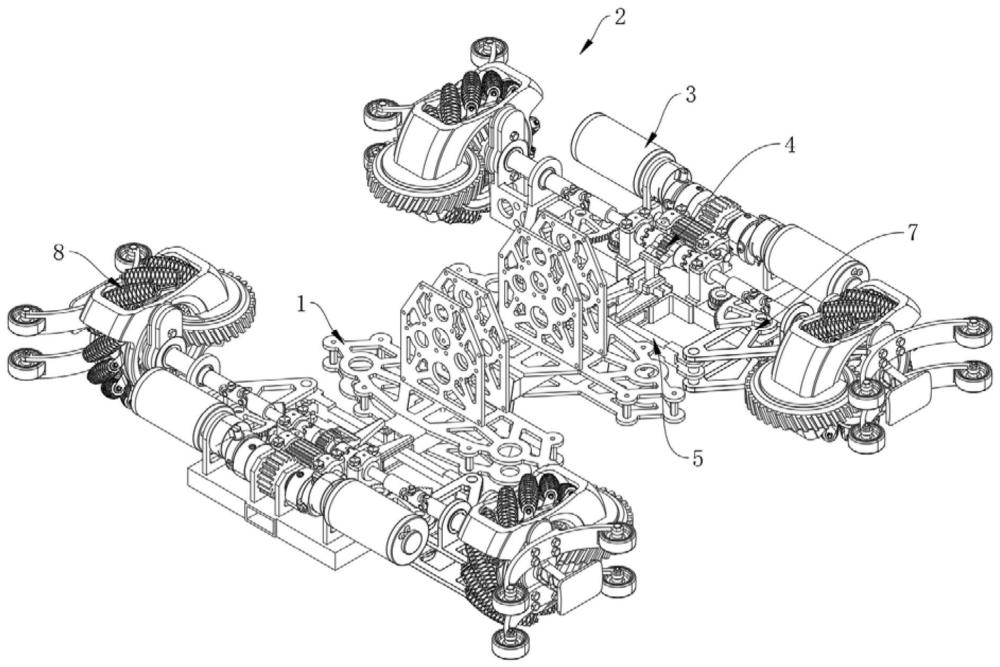
2、为了实现本发明的目的,本发明所采用的技术方案为:设计一种无人运输矿车用弯道转弯用协助装置,包括第二底盘骨架及行驶单元;两个行驶单元呈对称布置于所述第二底盘骨架两端;其中,所述行驶单元包括动力输出结构、离合结构、弯道适配轴杆、转向架及行驶轮组件;两个所述动力输出结构呈对称布置于所述第二底盘骨架两端;所述离合结构布置于所述动力输出结构输出端;两个所述转向架呈对称状布置于所述离合结构两个输出端;其中,所述转向架相对远离所述输出电机一侧设置延伸部;两个所述弯道适配轴杆呈对称状活动布置于所述第二底盘骨架上连接所述转向架;所述行驶轮组件布置于所述转向架上;其中,所述行驶单元具有直线四轮匀速驱动状态及弯道对角减速驱动状态;其中,所述行驶单元在直线四轮匀速驱动状态下;两个所述动力输出结构驱动所述离合结构两个输出端旋转运动,致使四个对称分布的行驶轮组件匀速驱动行进;形成居中直线式四轮驱动结构;其中,所述述行驶单元在弯道对角减速驱动状态下;两个所述动力输出结构驱动所述离合结构其中一个输出端旋转运动;致使两个呈对角分布的行驶轮组件减速驱动;形成弯道倾斜式减速驱动结构。
3、优选地,所述第二底盘骨架轴向两侧均开设有两个适配调节腔;其中,所述第二底盘骨架相对适配调节腔的径向两侧及上表面均开设有调节槽;其中,所述第二底盘骨架表面相对所述适配调节腔靠近所述动力输出结构一侧设置限位滑轨。
4、优选地,所述动力输出结构包括输出电机及键接齿轮;至少两个输出电机通过安装座a呈对称状布置于所述第二底盘骨架轴向两端;且,所述输出电机输出端设置有驱动齿轮a;所述键接齿轮通过轴承座a布置于所述驱动齿轮a一侧。
5、优选地,所述离合结构包括啮合轴套筒、双向啮合套筒及拨动杆;所述两个啮合轴套筒通过轴承座b呈对称状布置于所述键接齿轮远离所述输出电机一侧;其中,两个所述啮合轴套筒相对面间隙构成离合调节腔;其中,所述离合调节腔两端呈环形等间距设置有若干呈波浪状的啮合凸起;所述双向啮合套筒通过支撑轴活动布置于所述离合调节腔内;且,所述双向啮合套筒两侧开设有与所述啮合凸起相适配啮合凹槽;其中,所述双向啮合套筒外壁中端固设有输出齿轮;且,所述双向啮合套筒相对所述输出齿轮两侧设置调节凹槽;所述拨动杆活动布置于所述限位滑轨上。
6、优选地,所述拨动杆由径向限位滑动部、挤压调节部及输出调节部构成;其中,所述径向限位滑动部与所述限位滑轨滑动配合;其中,所述挤压调节部由两个对称分布呈直角梯形状的挤压受力块组成;且,两个所述挤压受力块相对间隙构成呈梯形状的挤压受力槽;其中,所述输出调节部与所述调节凹槽抵接配合。
7、优选地,两个径向相对分布的所述转向架之间间隙构成联动腔;其中,所述弯道适配轴杆布置于所述联动腔内;且,所述转向架与所述弯道适配轴杆铰接连接;其中,所述弯道适配轴杆、第二底盘骨架与两个所述转向架为平行四边形铰接结构;且,所述弯道适配轴杆中端设置有向上延伸的挤压受力凸起。
8、优选地,所述行驶轮组件包括驱动承载安装架、驱动斜齿轮轴杆、麦克纳姆轮组件及稳持齿轮;两个所述驱动承载安装架呈对称状径向布置于所述第二底盘骨架端部;且,所述驱动承载安装架内部间隙依次构成行驶轮腔、内啮合驱动腔、水平温持腔;所述驱动斜齿轮轴杆通过万向节布置于所述啮合轴套筒端部连接所述驱动承载安装架;所述麦克纳姆轮组件活动布置于所述行驶轮腔内;且,所述麦克纳姆轮组件内部设置有与所述驱动斜齿轮轴杆相啮合的斜齿槽;所述稳持齿轮活动布置于所述水平温持腔内;且,所述稳持齿轮与所述驱动斜齿轮轴杆相啮合。
9、优选地,所述行驶轮组件还包括弹簧板及摩擦板;至少一个所述弹簧板布置于所述驱动承载安装架相对远离所述输出电机一侧;其中,所述弹簧板呈弧形结构;且,所述弹簧板两端均设置后辅助滚轮;至少一个所述摩擦板布置于所述弹簧板一侧连接所述驱动承载安装架。
10、一种无人运输矿车用弯道转弯用协助装置的使用方法,包括以下步骤:
11、s100:安装处理:可直接将无人运输矿车底部轮组进行拆卸,将该协助装置作为无人运输矿车底盘,也可将该协助装置作为牵引端与无人运输矿车连接进行拖曳工作。
12、s200:驱动处理:通过输出电机驱动驱动齿轮a,致使键接齿轮同步旋转工作,使得双向啮合套筒整体进行旋转工作;
13、s300:离合调节:
14、若在直线轨道行驶:四个行驶轮组件保持直线方向,使得两个径向相对分布的转向架旋转可驱动弯道适配轴杆的挤压受力凸起保持位于适配调节腔中端位置,使得双向啮合套筒同步带动两个左右分布的啮合轴套筒进行旋转工作,使得该协助装置整体保持匀速移动运输工作;
15、若在弯曲轨道行驶:四个行驶轮组件收到轨道弯曲变化,发生旋转调节,使得两个行驶前端径向相对分布的转向架同步旋转可驱动弯道适配轴杆的挤压受力凸起向弯折弯折外侧进行移动,两个行驶后端径向相对分布的转向架同步旋转可驱动弯道适配轴杆的挤压受力凸起向弯折弯折内侧进行移动;致使挤压受力凸起挤压挤压调节部,使得拨动杆整体进行径向滑动移动,同步调节输出调节部的位置,使得双向啮合套筒与其中一个啮合轴套筒分离;保持另一个啮合轴套筒旋转驱动,通过啮合轴套筒及万向节带动驱动斜齿轮轴杆旋转驱动麦克纳姆轮组件进行旋转工作;此时行驶前端相对弯道内侧的麦克纳姆轮组件未受到驱动旋转,行驶后端相对弯道外侧的麦克纳姆轮组件未受到驱动旋转;基于麦克纳姆轮旋转驱动远离使得该协助装置整体相对发生倾斜,挤压弹簧板,使得弹簧板形变,摩擦板与轨道内壁进行摩擦接触,使得该协助装置实现减速移动运输工作。
16、与现有技术相比,本发明的有益效果在于:
17、1.本发明通过四个行驶轮组件相互对称设置,且基于麦克纳姆轮驱动原理,四轮同步同向旋转工作,以及行驶轮组件与分别与轨道弹性接触,致使该协助装置整体位于轨道居中来进行稳定匀速滑动移动工作;同时在轨道弯曲段,行驶前端相对靠近弯道内侧的行驶轮组件与离合结构分离,行驶前端相对靠近弯道外侧的行驶轮组件持续旋转;行驶后端相对靠近弯道内侧的行驶轮组件持续旋转;行驶后端相对靠近弯道外侧的行驶轮组件与离合结构分离;并在麦克纳姆轮驱动原理,在保持前进的同时,向弯道内侧挤压,使得行驶轮组件摩擦端与轨道内部接触,以实现减速效果,且上述行驶方式通过机械化联动控制,无需信号传输,直线行驶及弯折行驶依靠轨道弯折变化自适配调节切换。
18、2.本发明通过调节槽的设置以适配弯道适配轴杆活动调节所需空间位置,以及通过限位滑轨的来对离合结构活动调节进行径向限位,保持离合结构如图4所示的左右的移动。
19、3.本发明中键接齿轮相对驱动齿轮a及离合结构输入啮合端径向尺寸长,通过该键接齿轮以适配离合结构啮合调节所需持续的动力输入。
20、4.本发明中双向啮合套筒通过支撑轴穿插至两个相对分布的啮合轴套筒之间,且啮合轴套筒与双向啮合套筒活动转动,同时在双向啮合套筒相对位于离合调节腔的中轴线位置可分别与两个双向啮合套筒局部接触,通过上述操作以实现两个径向分布的行驶轮组件保持同步旋转及单一旋转操作。
21、5.本发明通过弯道适配轴杆的挤压驱动,致使拨动杆整体在限位滑轨的限位下做相对径向滑动调节,使得输出调节部可带动双向啮合套筒进行滑动调节,实现双向啮合套筒与啮合轴套筒同步啮合状态及单一啮合状态所需调节驱动。
22、6.本发明通过弯道适配轴杆、第二底盘骨架与两个转向架为平行四边形铰接结构,致使两个径向相对分布的转向架可同步驱动弯道适配轴杆进行调节移动,通过弯道适配轴杆空间位移挤压拨动杆进行自由适配调节啮合状态所需。
23、7.本发明通过弹簧板的设置在直线轨道行驶过程中,辅助保持该协助装置居中性,在弯道行驶过程中,基于麦克纳姆轮组件相对靠近弯道内侧的偏移,挤压弹簧板致使摩擦板内轨道内壁进行接触形成摩擦受力效率,实现减速功能。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233008.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。