面向全自动无人驾驶的多岗位协同处置系统、方法及设备与流程
- 国知局
- 2024-08-01 08:43:43
本发明涉及列车信号控制系统,尤其是涉及一种面向全自动无人驾驶的多岗位协同处置系统、方法及设备。
背景技术:
1、近几年城市轨道交通全自动无人驾驶项目蓬勃发展,国内越来越多的线路采用全自动无人驾驶建设和运营模式。全自动无人驾驶车辆不再配备司机,司机的职责转向运行控制中心(occ)调度人员。为了更好地服务乘客,同时在故障或应急情况下,能够快速的进行故障处置,一般全自动无人驾驶线路车辆还会设置车辆值乘人员,其主要负责车辆故障应急处置,快速响应乘客需求,特殊场景下人工驾驶车辆等。
2、全自动无人驾驶技术的应用在提高追踪间隔、运营效率等方面有了显著提升。但目前中心运营调度、车控室值班员、站务巡视以及车辆乘务人员主要通过对讲机进行故障协同处置,且故障应急处置主要依托纸质的故障应急处置指导文件,总体故障应急处置效率比较低,故障处置过程中存在误操作风险,从而扩大故障影响范围。
3、经过检索中国专利公开号cn116039722a公开了一种全自动无人驾驶车辆移动值乘辅助装置及方法,具体公开了包括:车辆数据采集单元,接入全自动运行车辆数据以及轨旁关键运营信息;车辆数据处理单元,用于对采集的数据进行统一化处理,并写入实时数据库,根据状态信息生成故障报警;车辆数据分析单元,用于对采集处理后的数据进行融合分析,并对复杂故障进行定位、原因分析和影响分析;便携仪值乘单元,用于实时获取本车相关的关键故障和运行信息,让值乘人员快速主动获取全自动车辆运营信息,并提供相关的排故指导;lte通信单元,用于通过lte网络与便携式值乘单元进行通信,将车辆、车站等关键故障和运行推送给便携仪值乘单元。但是该现有专利并未涉及全自动无人驾驶中的多岗位协同处置技术,因此如何来提高全自动运行线路故障应急处置效率和运营安全可靠性,成为需要解决的技术问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种面向全自动无人驾驶的多岗位协同处置系统、方法及设备,从而大大提高了全自动运行线路关键岗位协同和故障应急处置效率以及运营安全可靠性。
2、本发明的目的可以通过以下技术方案来实现:
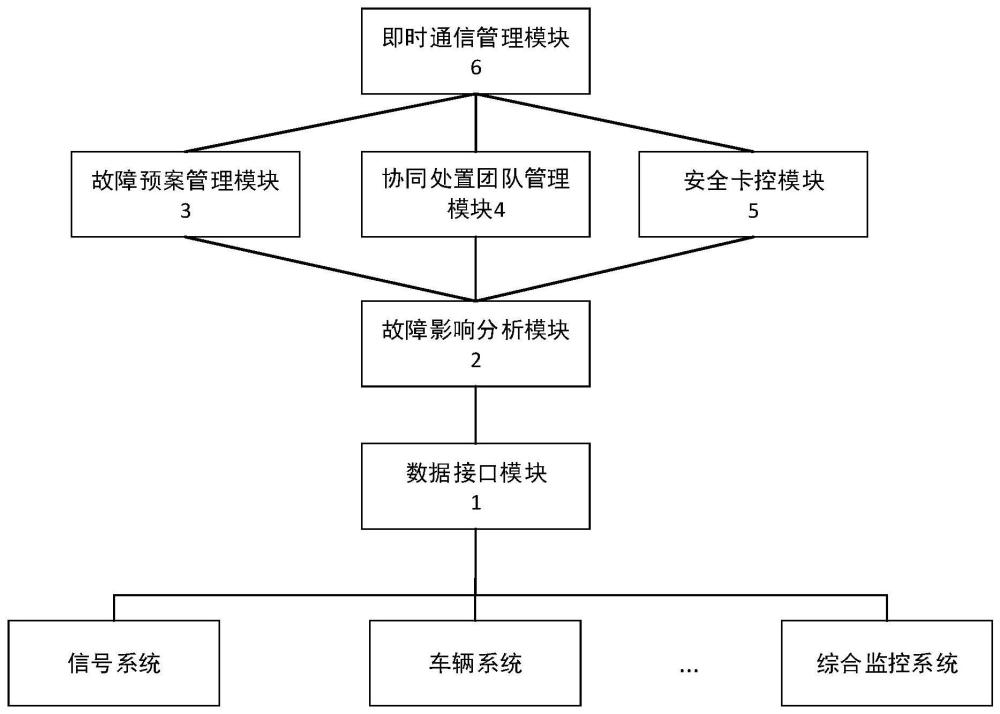
3、根据本发明的第一方面,提供了一种面向全自动无人驾驶的多岗位协同处置系统,该系统包括:
4、数据接口模块,分别与信号系统、车辆系统和综合监控系统连接,用于实时接收全自动无人驾驶线路关键故障和事件、列车实时位置信息;
5、故障影响分析模块,与数据接口模块连接,用于实时分析故障需要哪些位置和岗位的人员参与协同处置;
6、故障预案管理模块,与故障影响分析模块连接,用于根据故障情况提供故障应急处置指导和关键设备状态、运营信息;
7、协同处置团队管理模块,与故障影响分析模块连接,用于实时监督关键运营岗位人员,根据故障情况自动创建协同处置团队;
8、安全卡控模块,与故障影响分析模块连接,用于实时监督和保障应急处置过程中的关键操作是否及时执行到位;
9、即时通信管理模块,分别与故障预案管理模块、协同处置团队管理模块和安全卡控模块连接,用于实时向协同处置团队发布共享信息以及故障处置进展、故障相关的设备状态信息。
10、作为优选的技术方案,所述数据接口模块用于实时感知和采集全自动无人驾驶线路的影响运营的关键设备故障和事件,并将关键设备故障和事件信息实时写入专用实时库。
11、作为优选的技术方案,所述故障影响分析模块融合信号系统、车辆系统、电力系统信息,准确定位故障发生位置,并分析需要哪些位置和专业岗位人员协同处置,其中故障发生位置包括车站、区间和场段。
12、作为优选的技术方案,所述故障预案管理模块根据故障发生位置信息,提供与之匹配的动态预案流程,该流程融合显示故障相关的状态信息和必要的操控功能,并在预案流程处置中进行安全监督和可靠性保障。
13、作为优选的技术方案,所述故障预案管理模块具备交互式排除故障预案指导过程,对需要人工判断场景,支持人工选择或输入关键信息,并根据人机交互信息提供下一步的处置建议信息。
14、作为优选的技术方案,所述协同处置团队管理模块管理全线路关键运营岗位人员,包括各岗位人员所属专业、工作处所、是否在岗在线和每个岗位所具备的操控权限信息。
15、作为优选的技术方案,所述关键运营岗位人员包括occ的行车调度、电力调度、车辆调度、和环控调度员;车站控制室的值班长和值班员;车站站台的站务巡视以及负责全自动车辆的车辆值乘人员。
16、作为优选的技术方案,所述关键运营岗位人员依托pc工作站或移动终端设备进行协同处置,其中移动终端设备接入lte综合承载网。
17、作为优选的技术方案,所述安全卡控模块实时监督关键操控是否及时执行到位,若车站发生屏蔽门夹人时,同时站务人员没有及时激活esp按钮,所述安全卡控模块及时提醒协同处置团队及时激活esp按钮并执行站台扣车操作。
18、作为优选的技术方案,所述即时通信管理模块同时支持跨网络pc和移动终端设备,支持图片、文字、语音、视频信息共享;支持对共享的视频、图片进行大小和上传速度的控制。
19、根据本发明的第二方面,提供了一种采用所述面向全自动无人驾驶的多岗位协同处置系统的方法,包括以下步骤:
20、步骤s1、数据接口模块实时采集全自动运行线路严重影响运营关键设备故障和运营事件,并写入专业实时库;
21、步骤s2、故障影响分析模块根据故障设备信息和故障位置信息,实时分析故障影响范围,并准确分析故障协同处置岗位和人员;
22、步骤s3、协同处置团队管理模块实时监督和管理各关键岗位人员,并在故障发生后,根据故障专业和位置信息,自动创建协同处置团队;
23、步骤s4、故障预案管理模块根据故障设备所属专业和故障位置信息,为协同处置团队管理模块提供故障处置预案,并在预案执行过程中进行安全监督和可靠性保障;
24、步骤s5、协同处置团队管理模块依据故障预案管理模块提供的故障处置预案进行协同处置,在处置的过程中,各成员之间实时共享处置信息;
25、步骤s6、安全卡控模块实时监督关键操控是否及时执行到位,故障处理完成后对结果进行监督卡控。
26、作为优选的技术方案,所述步骤s2中的,准确分析故障协同处置岗位和人员具体为:
27、步骤s21,将车站、场段和车辆设置为故障所属区域,定义为唯一的zone;故障发生时,将确定故障所属的zone;
28、步骤s22,每类故障报警信息中设置zone字段,用于记录故障所属车站或车辆;每类故障报警中设置zone_relative字段,用于动态计算故障需要哪些其他的区域知晓并协同处置;
29、步骤s23,基于ats发送的列车实时位置车次窗信息,实时计算车辆所在的区间、车站以及场段范围,以及是否停靠在站台;
30、步骤s24,如果车辆在运营过程中发生严重故障,需要轨旁车站人员协同处置时,将故障的zone_relative设置为车辆运行或停靠车站的zone;
31、步骤s25,如果轨旁车站发生严重故障需要车辆乘务人员协同处置时,则将该故障的zone_relative设置为运行在车站区域的车辆zone;
32、步骤s26,根据zone和zone_relative确定协同处置成员并自动创建协同处置团队。
33、作为优选的技术方案,所述协同处置成员默认包括该设备故障所属专业对应负责的中心职能调度,若信号系统故障,包括行车调度员。
34、作为优选的技术方案,所述步骤s6中的安全卡控模块具体过程如下:
35、步骤s61,根据全自动运行场景建立安全卡控模型和规则;
36、步骤s62,建立安全卡控执行推理机,当严重故障触发并建立协同处置团队后,自动加载该故障场景的安全卡控模型;
37、步骤s63,根据故障场景订阅的安全卡控规则,进行关键操作的实时监督;
38、步骤s64,当关键操作没有及时执行时,及时调用即时通信模块,向协同处置团队广播监督结果并提醒及时执行;
39、步骤s65,当故障处置后,综合检查该故障相关设备的实时状态信息,并输出卡控结果作为故障最终处理完成的重要条件之一。
40、根据本发明的第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
41、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
42、与现有技术相比,本发明具有以下优点:
43、1、本发明设计了面向全自动无人驾驶的多岗位协同处置机制,可以显著各岗位协同处置和信息共享效率;
44、2、本发明为全自动无人驾驶线路提供了融合状态显示和操控的预案流程,可以显著提高故障应急处置效率和精准度;
45、3、本发明在故障应急处置过程中提供了关键操作的安全卡控功能,可以显著提高故障应急处置的安全可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233007.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表