ATO控车曲线的计算方法和装置与流程
- 国知局
- 2024-08-01 08:43:41
本发明涉及轨道交通,尤其涉及一种ato控车曲线的计算方法和装置。
背景技术:
1、现有技术中使用的基于移动闭塞通信的第一代信号控制系统中,ato系统采用的pid控车算法在列车的运行舒适度和停车精度方面存在不足。
技术实现思路
1、本发明提供一种ato控车曲线的计算方法和装置,用以解决现有技术中控车精度低且区间运行的舒适度低的缺陷,实现在第一代信号控制系统中兼容新ato控车算法,进而提高列车的停车精度以及及区间运行的舒适度。
2、本发明提供一种ato控车曲线的计算方法,应用于列车的ato系统,所述方法包括:
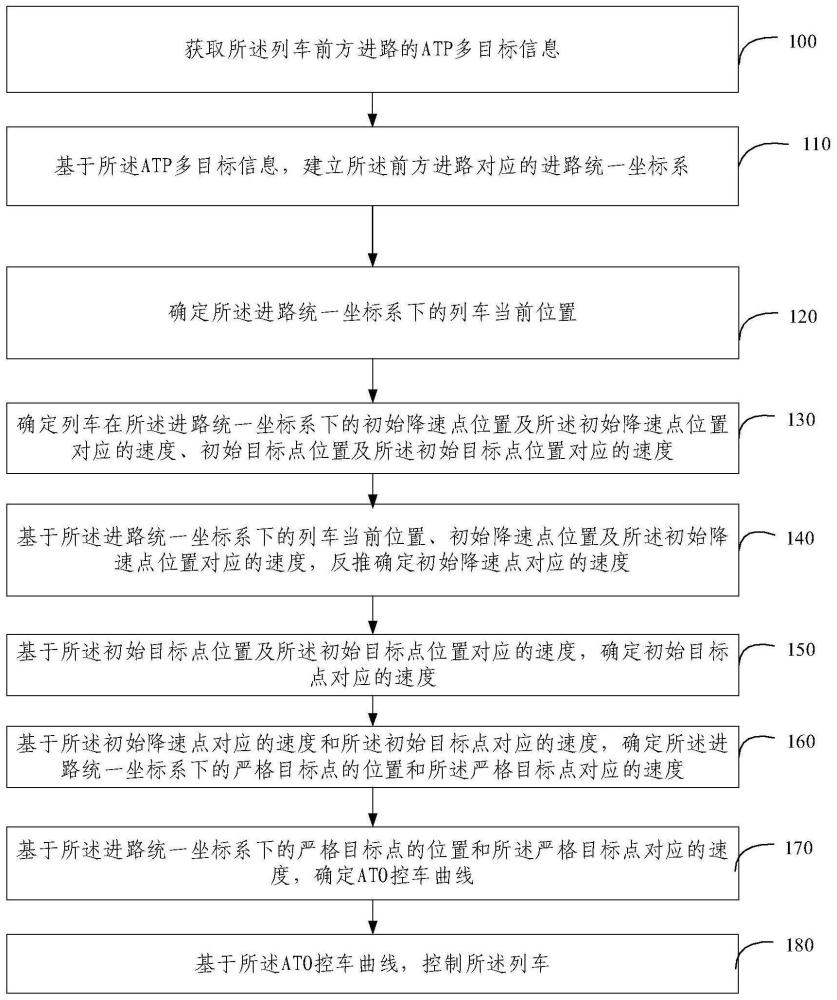
3、获取所述列车的前方进路的atp多目标信息;
4、基于所述atp多目标信息,建立所述前方进路对应的进路统一坐标系;
5、确定所述进路统一坐标系下的列车当前位置;
6、确定列车在所述进路统一坐标系下的初始降速点位置及所述初始降速点位置对应的速度、初始目标点位置及所述初始目标点位置对应的速度;
7、基于所述进路统一坐标系下的列车当前位置、初始降速点位置及所述初始降速点位置对应的速度,反推确定初始降速点对应的速度;
8、基于所述初始目标点位置及所述初始目标点位置对应的速度,确定初始目标点对应的速度;
9、基于所述初始降速点对应的速度和所述初始目标点对应的速度,确定所述进路统一坐标系下的严格目标点的位置和所述严格目标点对应的速度;
10、基于所述进路统一坐标系下的严格目标点的位置和所述严格目标点对应的速度,确定ato控车曲线;
11、基于所述ato控车曲线,控制所述列车。
12、根据本发明提供的一种ato控车曲线的计算方法,所述确定列车在所述进路统一坐标系下的初始降速点位置及所述初始降速点位置对应的速度、初始目标点位置及所述初始目标点位置对应的速度,包括:
13、根据所述前方进路中各个轨道的固定限速及分段限速信息,确定所述前方进路的最严格限速;
14、基于所述前方进路的最严格限速和所述eb限制速度,确定所述前方进路的初始顶棚速度;
15、基于所述初始顶棚速度,确定列车在所述进路统一坐标系下的初始降速点位置及所述初始降速点位置对应的速度;
16、基于所述atp多目标信息,确定列车在所述进路统一坐标系下的初始目标点位置及所述初始目标点位置对应的速度。
17、根据本发明提供的一种ato控车曲线的计算方法,所述获取所述列车的前方进路的atp多目标信息,包括:
18、接收atp系统发送的第一相关信息,所述第一相关信息包括:所述列车的目标制动个数、目标速度、目标距离、所述列车的当前轨道、当前轨道偏移位置、前方进路的进路代码、eb限制速度、运营等级;
19、基于所述前方进路,对电子地图数据信息进行索引,得到第二相关信息,所述第二相关信息包括:前方进路的轨道长度、坡度及限速信息,所述限速信息包括前方进路中各个轨道的固定限速及分段限速信息;
20、基于所述第一相关信息和/或所述第二相关信息,确定所述atp多目标信息。
21、根据本发明提供的一种ato控车曲线的计算方法,所述确定所述进路统一坐标系下的列车当前位置,包括:
22、确定所述进路统一坐标系下的列车当前位置为poscur=poso+len1+…+lenm-posδ;
23、其中,poso为所述统一坐标系的起点位置,列车当前处于前方进路的第m条轨道,posδ为当前轨道偏移位置,lenm表示第m个目标制动的轨道。
24、根据本发明提供的一种ato控车曲线的计算方法,确定所述进路统一坐标系下的初始目标点位置,包括:
25、确定所述进路统一坐标系下的初始目标点位置为post=poscur+目标距离;
26、其中,poscur为所述进路统一坐标系下的列车当前位置。
27、根据本发明提供的一种ato控车曲线的计算方法,所述基于所述进路统一坐标系下的列车当前位置、初始降速点位置及所述初始降速点位置对应的速度,反推确定初始降速点对应的速度,包括:
28、确定初始降速点对应的速度为
29、其中,posb为初始降速点位置,vb为所述初始降速点位置对应的速度,posa为列车当前位置。
30、本发明还提供一种ato控车曲线的计算装置,应用于列车的ato系统,所述装置包括:
31、第一获取模块,用于获取所述列车的前方进路的atp多目标信息;
32、坐标系建立模块,用于基于所述atp多目标信息,建立所述前方进路对应的进路统一坐标系;
33、第一确定模块,用于确定所述进路统一坐标系下的列车当前位置;
34、第二确定模块,用于确定列车在所述进路统一坐标系下的初始降速点位置及所述初始降速点位置对应的速度、初始目标点位置及所述初始目标点位置对应的速度;
35、第三确定模块,用于基于所述进路统一坐标系下的列车当前位置、初始降速点位置及所述初始降速点位置对应的速度,反推确定初始降速点对应的速度;
36、第四确定模块,用于基于所述初始目标点位置及所述初始目标点位置对应的速度,确定初始目标点对应的速度;
37、第五确定模块,用于基于所述初始降速点对应的速度和所述初始目标点对应的速度,确定所述进路统一坐标系下的严格目标点的位置和所述严格目标点对应的速度;
38、第六确定模块,用于基于所述进路统一坐标系下的严格目标点的位置和所述严格目标点对应的速度,确定ato控车曲线;
39、控制模块,用于基于所述ato控车曲线,控制所述列车。
40、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一项所述ato控车曲线的计算方法的步骤。
41、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述ato控车曲线的计算方法的步骤。
42、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现上述任一项所述ato控车曲线的计算方法的步骤。
43、本发明提供的ato控车曲线的计算方法和装置,通过建立进路统一坐标系,基于既有接口,根据固定限速分段限速、坡度、ep限速、临时限速轨道信息等信息通过统一坐标系的综合计算得到进路统一坐标系下的严格目标点的位置和所述严格目标点对应的速度,进而确定ato控车曲线并基于所述ato控车曲线,控制所述列车,从而实现列车能够响应线路限速、运营等级及临时限速信息并执行有效的控车策略,实现区间自动运行及站台的精确停车。
技术特征:1.一种ato控车曲线的计算方法,其特征在于,应用于列车的ato系统,所述方法包括:
2.根据权利要求1所述的ato控车曲线的计算方法,其特征在于,所述确定列车在所述进路统一坐标系下的初始降速点位置及所述初始降速点位置对应的速度、初始目标点位置及所述初始目标点位置对应的速度,包括:
3.根据权利要求1所述的ato控车曲线的计算方法,其特征在于,所述获取所述列车的前方进路的atp多目标信息,包括:
4.根据权利要求1所述的ato控车曲线的计算方法,其特征在于,所述确定所述进路统一坐标系下的列车当前位置,包括:
5.根据权利要求1所述的ato控车曲线的计算方法,其特征在于,确定所述进路统一坐标系下的初始目标点位置,包括:
6.根据权利要求1所述的ato控车曲线的计算方法,其特征在于,所述基于所述进路统一坐标系下的列车当前位置、初始降速点位置及所述初始降速点位置对应的速度,反推确定初始降速点对应的速度,包括:
7.一种ato控车曲线的计算装置,其特征在于,应用于列车的ato系统,所述装置包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述ato控车曲线的计算方法的步骤。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述ato控车曲线的计算方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述ato控车曲线的计算方法的步骤。
技术总结本发明提供一种ATO控车曲线的计算方法和装置,该ATO控车曲线的计算方法应用于列车的ATO系统,包括:获取列车的前方进路的ATP多目标信息;基于ATP多目标信息,建立前方进路对应的进路统一坐标系;确定进路统一坐标系下的列车当前位置;确定列车在进路统一坐标系下的初始降速点位置及所述初始降速点位置对应的速度、初始目标点位置及所述初始目标点位置对应的速度;确定初始降速点对应的速度;确定初始目标点对应的速度;确定进路统一坐标系下的严格目标点的位置和严格目标点对应的速度;基于进路统一坐标系下的严格目标点的位置、严格目标点对应的速度,确定ATO控车曲线;基于ATO控车曲线,控制所述列车。技术研发人员:李涛涛,吴亮,彭朝阳,张晨,柴荣阳,马新成,周丽华,郑志军,穆继文,李萌受保护的技术使用者:通号城市轨道交通技术有限公司技术研发日:技术公布日:2024/3/17本文地址:https://www.jishuxx.com/zhuanli/20240718/233001.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表