轨道车辆防滑控制方法与流程
- 国知局
- 2024-08-01 08:43:38
本发明属于轨道交通,尤其涉及一种轨道车辆防滑控制方法。
背景技术:
1、铁道车辆防滑系统是一种用于防止车轮出现抱死擦伤的技术,其主要目的是保持车轮和铁轨之间的粘附,以避免车轮滑行。目前,主要的滑行检测方法包括速度差判据和减速度判据。
2、铁道车辆防滑系统旨在防止车轮抱死和踏面擦伤。目前,这些系统通常采用速度差和减速度判据来检测滑行情况。速度差判据根据车辆的参考速度和轮轴速度之间的差异进行判断,而减速度判据则依赖于轮轴速度的减少。当满足这些判据之一时,系统会触发防滑控制,通过调整制动缸压力来消除滑行,从而避免车轮踏面擦伤。
3、然而,在当前方法中存在问题。车辆的参考速度通常是通过估算得出的,这可能导致速度差检测的不准确性。
技术实现思路
1、针对相关技术中存在的不足之处,本发明提供了一种轨道车辆防滑控制方法,解决防滑控制数据来源不准确的技术问题。
2、根据本申请的另一方面,提供了一种轨道车辆防滑控制方法,该方法包括以下步骤:获取车辆的减速度a车和轮减速a轴,并在车辆的减速度大于理论最大减速度或在车辆的减速度为0且轮减速不为0时,舍弃该车辆的减速度,采用备用的车辆的减速度;当车辆的减速度a车的采集值在合理范围内时,对车辆的减速度a车进行滤波处理,使用自适应滤波算法计算补偿值,以剔除采集波动带来的误差;测量各个轴的轴速,计算车辆速度,包括:比较各个轴的轮减速a轴与车辆的减速度a车,若至少1个轴的轮减速a轴不大于测得的车辆的减速度a车,则取所有轴速中的最大值作为车辆速度;若所有轴的轮减速均大于车辆的减速度a车,则车辆速度按照如下公式计算:,为前一次计算或者更新的车辆轴速,a车为最新滤波计算得到的车辆的减速度,t为采样时间间隔;当所有轴的轮减速均大于车辆的减速度a车,则确定各轴均处于滑行中,根据如下的滑移率的计算公式,计算出理想的轴速度:λ=(v_车-v_轴)/v_车*100%;根据滑移率λ与μ粘着系数的对应关系,确定滑移率在β点为第一理想轴速,滑移率在α点的轴速为第二理想轴速;其中,α点滑移率为1.5%,β点滑移率为5%一25%;当测得的轴速小于第一理想轴速时,控制防滑阀排风;当测得的轴速大于第二理想轴速时,控制防滑阀充风;当测得的轴速小于或等于第二理想轴速时且大于或等于第一理想轴速时,控制防滑阀保压。
3、在一种可能的实施方式中,所述自适应滤波算法包括连续多次采样以计算一段时间内的车辆的减速度值,采样间隔时间t为100ms,采样数量为5次。
4、在一种可能的实施方式中,对车辆的减速度a车进行滤波处理,使用自适应滤波算法,按照如下公式计算:
5、
6、e(k)=d(k)-y(k);
7、ωi(k+1)=ωi(k)+2μe(k)x(k-i);
8、其中:x(k)为车辆的减速度值采样的输入,y(k)为输出车辆的减速度值的采集值,d(k)为参考的补偿值,此处取最近5次计算出的理论值的中位数,e(k)为误差值,ωi(k)为权重系数,μ为步长;
9、令x(k)为x(k)的自相关矩阵,λmax为x(k)的最大特征值,则μ的取值范围为(0<μ<λmax),其中,μ=0.9999λmax。
10、在一种可能的实施方式中,还包括:计算理论制动缸压力,以先验防滑的方式调节制动缸压力。
11、在一种可能的实施方式中,根据系统机械结构特性计算出制动压力p与施加在轮轴上的减速度的对应关系,p=κ*a轴,其中κ为机械系数。
12、在一种可能的实施方式中,所述制动缸压力的计算方法包括使用先统计后查表的方式获取机械系数κ,根据实时记录更新的数据以确定制动缸压力与轮轴减速度的对应关系。
13、在一种可能的实施方式中,所述查表方法使用先前统计的车辆减速度与理论制动缸压力的关系。
14、在一种可能的实施方式中,进一步包括控制防滑阀根据实时采集到的制动缸压力与计算得到的理论制动缸压力的差值进行动作,以调整实际制动缸压力至理论值。
15、在一种可能的实施方式中,实时记录更新制动命令施加后轴速达到第一理想速度时的车辆减速度a车ideal,此减速度应为该路段轮轨间粘着的最大值或者接近最大值;将该车辆的减速度代入p=κ*a,计算制动缸压力p。
16、基于上述技术方案,本发明实施方式的轨道车辆防滑控制方法,自动完成空气弹簧上料、角度调整、搬运和检测,实现空气弹簧检测的自动化,提高生产线工作效率,降低工人劳动强度。
技术特征:1.一种轨道车辆防滑控制方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述自适应滤波算法包括连续多次采样以计算一段时间内的车辆的减速度值,采样间隔时间t为100ms,采样数量为5次。
3.根据权利要求2所述的方法,其特征在于,对车辆的减速度a车进行滤波处理,使用自适应滤波算法,按照如下公式计算:
4.根据权利要求3所述的方法,其特征在于,还包括:计算理论制动缸压力,以先验防滑的方式调节制动缸压力。
5.根据权利要求4所述的方法,其特征在于,根据系统机械结构特性计算出制动压力p与施加在轮轴上的减速度的对应关系,p=κ*a轴,其中κ为机械系数。
6.根据权利要求5所述的方法,其特征在于,所述制动缸压力的计算方法包括使用先统计后查表的方式获取机械系数κ,根据实时记录更新的数据以确定制动缸压力与轮轴减速度的对应关系。
7.根据权利要求6所述的方法,其特征在于,所述查表方法使用先前统计的车辆减速度与理论制动缸压力的关系。
8.根据权利要求7所述的方法,其特征在于,进一步包括控制防滑阀根据实时采集到的制动缸压力与计算得到的理论制动缸压力的差值进行动作,以调整实际制动缸压力至理论值。
9.根据权利要求8所述的方法,其特征在于,实时记录更新制动命令施加后轴速达到第一理想速度时的车辆减速度a车ideal,此减速度应为该路段轮轨间粘着的最大值或者接近最大值;将该车辆的减速度代入p=κ*a,计算制动缸压力p。
10.根据权利要求9所述的方法,其特征在于,若采集到的制动缸压力大于p,即可按照压力差的不同级位进行排风至制动缸压力等于计算值;在此过程中,继续保持速度采集,若根据速度差和减速度判据控制算法应该进入更高级位排风则进入更高级位的控制;当速度差被控制小于判定值后,防滑阀会充风或保压,当再次检测到速度差从小于第二理论值变到大于第二理论值,可使用同样的方法,使用车辆减速度计算出理论制动缸压力值并控制防滑阀动作。
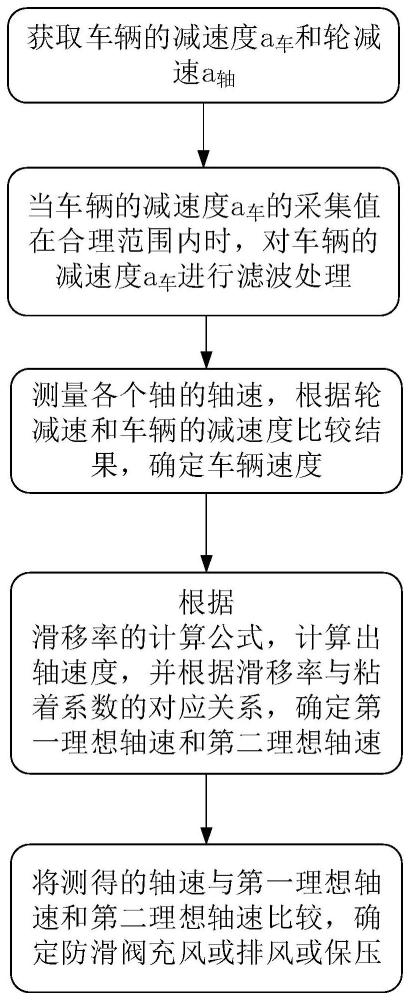
技术总结本发明涉及一种轨道车辆防滑控制方法,该方法包括:获取车辆的减速度a<subgt;车</subgt;和轮减速a<subgt;轴</subgt;;当车辆的减速度a<subgt;车</subgt;的采集值在合理范围内时,对车辆的减速度a<subgt;车</subgt;进行滤波处理;测量各个轴的轴速,根据轮减速和车辆的减速度比较结果,确定车辆速度;根据滑移率的计算公式,计算出轴速度,并根据滑移率与粘着系数的对应关系,确定第一理想轴速和第二理想轴速;将测得的轴速与第一理想轴速和第二理想轴速比较,确定防滑阀充风或排风或保压。本发明解决了现有技术中轨道车辆防滑控制中数据来源不准确的问题。技术研发人员:孙海标,许丰磊,张乾乾,赵欣受保护的技术使用者:中车制动系统有限公司技术研发日:技术公布日:2024/3/17本文地址:https://www.jishuxx.com/zhuanli/20240718/232995.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表