面向冰层攀附的仿葎草的轮式结构及其运动方式
- 国知局
- 2024-08-01 07:37:18
本发明涉及一种面向冰层攀附的仿葎草的轮式结构及其运动方式,属于冰层上附着移动平台。
背景技术:
0、技术背景
1、极地探索机器人首先需要解决在冰层上运动的问题。目前机器人的采用的运动主要以履带式、轮式等。履带式的极地探索的机器人主要的劣势是结构复杂,移动缓慢;轮式的极地探索的机器人在面对倾斜过一定角度的冰层面容易出现打滑。因此,设计一种能够在冰层上攀附的机器人,将有重要的研究意义和工程价值。
2、中国科学院沈阳自动化研究所提出了一种便携式的冰雪面的移动机器人采用两个电机带动主动轮转动的方式在冰面上移动,该机器人在能实现在冰面上前进、转弯,不能实现在倾斜的冰面上附着等运动。(中国科学院沈阳自动化研究所.便携式的冰雪面的移动机器人[p]:中国,101439671a.2009-05-17.)。上海大学提出了一种履带式冰面检测标记机器人,该机器人在倾斜冰层上攀爬和附着的能力不行。(上海大学.履带式冰面检测标记机器人[p]:中国,109398515a.2019-03-01)。
3、目前关于面向冰层攀附的仿葎草的轮式结构尚未有报道。
技术实现思路
1、本发明的目的是使得设计出能够在冰层面上运动的装置。通过对自然界中葎草茎上的纺锤形的双头刺在不同方向上表现出不同的摩擦的特性进行仿生,将该仿生的双头尖刺安装至轮子上,提供一种面向冰层攀附的仿葎草的轮式结构及其运动方式。
2、上述的面向冰层攀附的运动的轮式结构,其特征在于:由轮毂、轮毂外侧端盖、减速电机、滚动轴承、套筒、轮毂内侧端盖组成;其中轮毂通过滚动轴承安装于套筒上,可相对转动;其中轮毂内侧端盖和轮毂外侧端盖分别固定安装于轮毂内、外两侧;其中套筒安装于车架上;其中减速电机安装于套筒内,其输出轴与轮毂外侧端盖相连,带动轮毂外侧端盖、轮毂及其轮毂内侧端盖一起转动;上述的轮毂由n片沿着轮毂周向均匀分解的轮毂片组成;上述的轮毂的表面布置有若干对葎草仿生双头刺;每个对葎草仿生双头刺均由方向相反的两根刺结构组成;且对葎草仿生双头刺的刺的安装朝向轮子周向。
3、一个轮毂上的全部对葎草仿生双头刺沿轮毂周向均匀分成若干组刺结构,每一组刺结构由带扭簧的销轴、连接件、沿轮毂表面平行轴线方向布置的若干个对葎草仿生双头刺组成;对葎草仿生双头刺通过装有扭簧的销轴安装于连接件,连接件安装于轮毂上;上述的带扭簧的销轴具有两个方向相反的扭簧,分别布置于销轴的两端。
4、上述的面向冰层攀附的运动的轮式结构的运动方式,其特征包括以下部分:当轮毂开始转动,与倾斜冰层表面接触的轮毂上的对葎草仿生的双头刺由于压力的作用,将在装有扭簧的销轴上转动与轮子的转向相反的方向,并刺入冰层,从而实现沿倾斜冰面向上攀爬运动;在沿倾斜冰面向上攀爬运动过程中当减速电机停止转动,轮毂停止转动;由于该仿生的结构在此状态下,对葎草仿生的双头刺的表面较为光滑,该装置将在冰面上滑行一段距离后,速度减至0;随后在重力的作用下,整个结构沿着倾斜的冰面向下运动,轮子在倾斜的冰面上将会反向转动,与倾斜冰层表面接触的轮毂上的对葎草仿生的双头刺将再次受到压力的作用而转动,转向与此时的轮子转向相反,并刺入冰层,当能抵消重力时,将会相对静止在倾斜的冰层上,从而实现附着在冰层表面。
5、本发明与现有技术相比有如下优点:
6、本发明能够通过仿葎草的纺锤形刺的结构,使得机器人能够在冰层上实现攀爬、附着、滑行的运动。
7、本发明能长时间附着在冰层的表面,节省能源。
8、结构简单,适应性强、灵活性好。
9、上述沿轮毂周向分成的若干组刺结构;相邻组的刺结构可为对称均匀布置方式。
10、上述轮毂可以由n片沿着轮毂周向均匀分解的轮毂片组合而成。
技术特征:1.一种面向冰层攀附的仿葎草的轮式结构,其特征在于:
2.根据权利要求1所述的面向冰层攀附的仿葎草的轮式结构,其特征在于:
3.根据权利要求2所述的面向冰层攀附的仿葎草的轮式结构,其特征在于:
4.根据权利要求1至3任一所述的面向冰层攀附的仿葎草的轮式结构,其特征在于:
5.根据权利要求2所述的面向冰层攀附的仿葎草的轮式结构的运动方式,其特征在于:
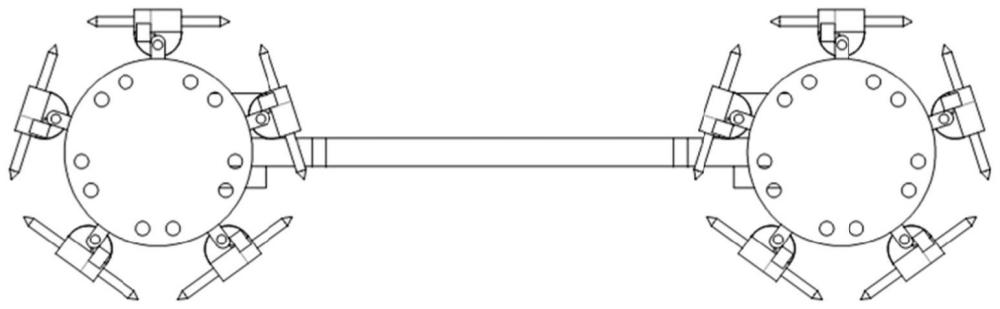
技术总结本发明涉及一种面向冰层攀附的仿葎草的轮式结构及其运动方式,属于冰层上附着移动平台技术领域。该轮式结构由前轮架(1)、前连接件(2)、中间连接板(3)、后连接件(4)、后轮架(5)、对葎草仿生的双头刺(6)、装有扭簧的销轴(7)、连接件(8)、轮毂片(9)、轮毂外侧端盖(10)、减速电机(11)、轴承(12)、套筒(13)、轮毂内侧端盖(14)组成。该结构汲取了葎草的纺锤形刺的优点,能够实现在倾斜的冰层上攀附、滑行的运动,可以更好的适应冰层的环境。对极地勘察等领域具有重要研究意义和应用价值。技术研发人员:俞志伟,吴黎涛,徐小峰,梁铭烨,程林文,邱一帆受保护的技术使用者:南京航空航天大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/228239.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表