扭矩的确定方法、系统及车辆与流程
- 国知局
- 2024-08-01 07:37:05
本公开涉及车辆控制领域,具体地,涉及一种扭矩的确定方法、系统及车辆。
背景技术:
1、电动助力转向系统(electric power steering,eps)是通过电机输出扭矩来为车辆转向进行助力的控制系统。l2级的驾驶辅助驾驶系统行车功能包括:车道保持辅助(lanekeeping assist,lka)、紧急车道保持辅助(elka)、智能巡航控制(intelligent cruisecontrol,icc)、高速公路驾驶辅助(highway assist,hwa)、交通拥堵领航(traffic jampilot,tjp)等,这些功能可以实现不同行车工况下的驾驶辅助功能。adas(英文:advanceddriving assistance system,中文:高级驾驶辅助系统)行车功能算法计算出转角指令值并通过车载总线网络发送给eps,由eps进行转角控制。目前,l2级自动驾驶/辅助驾驶系统已经被广泛普及,因此eps作为adas的角度指令执行端,其对于角度控制的执行效果尤为关键。
技术实现思路
1、本公开的目的是提供一种扭矩的确定方法、系统及车辆,用于提高控制车辆转向的准确度。
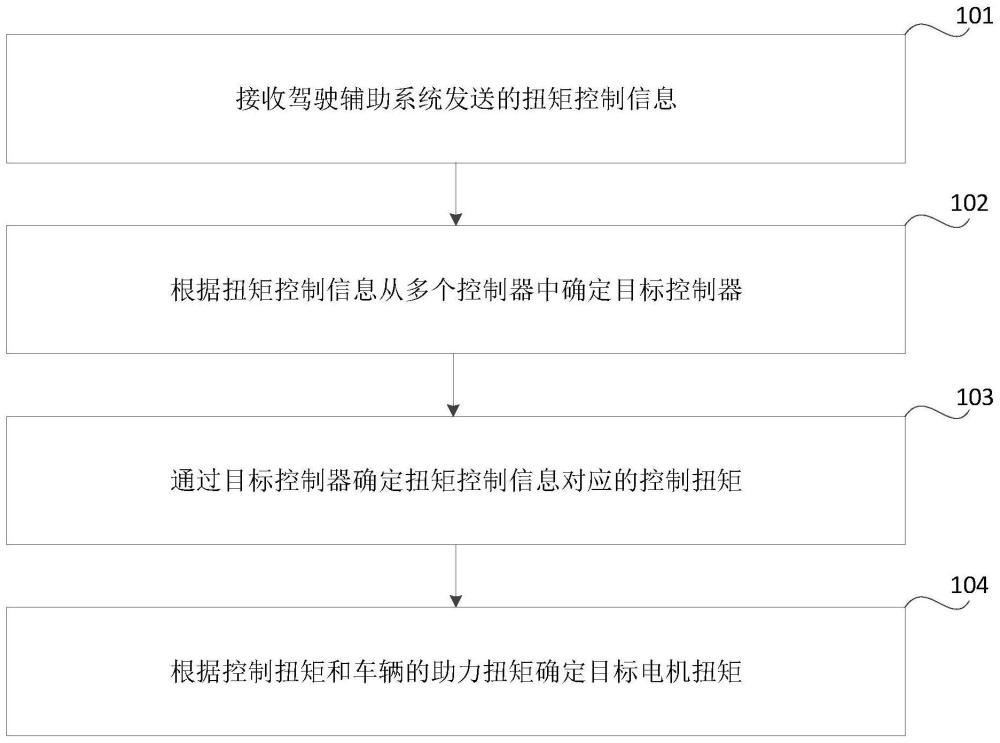
2、根据本公开实施例的第一方面,提供一种扭矩的确定方法,应用于电动助力转向系统eps,所述eps包括多个控制器;所述方法包括:
3、接收驾驶辅助系统发送的扭矩控制信息;
4、根据所述扭矩控制信息从所述多个控制器中确定目标控制器;
5、通过所述目标控制器确定所述扭矩控制信息对应的控制扭矩;
6、根据所述控制扭矩和车辆的助力扭矩确定目标电机扭矩。
7、可选地,所述方法还包括:
8、获取所述车辆的状态信息,所述状态信息指示所述eps的运行状态以及所述eps与所述驾驶辅助系统之间的交互状态;
9、所述根据所述扭矩控制信息从所述多个控制器中确定目标控制器包括:
10、在所述状态信息指示所述车辆未发生故障的情况下,根据所述扭矩控制信息从所述多个控制器中确定所述目标控制器。
11、可选地,所述方法还包括:
12、在所述状态信息指示所述车辆发生故障的情况下,确定所述控制扭矩为零。
13、可选地,所述方法还包括:
14、根据所述扭矩控制信息确定所述驾驶辅助系统的功能信息,所述功能信息指示所述驾驶辅助系统的行车功能;
15、所述根据所述控制扭矩和车辆的助力扭矩确定目标电机扭矩包括:
16、根据所述功能信息、所述控制扭矩和车辆的助力扭矩确定目标电机扭矩。
17、可选地,所述根据所述功能信息、所述控制扭矩和车辆的助力扭矩确定目标电机扭矩包括:
18、根据所述功能信息确定目标叠加模式;
19、在所述目标叠加模式指示执行扭矩坡度处理的情况下,根据预设坡度关系确定所述功能信息对应的目标斜率,所述预设坡度关系包括行车功能与斜率之间的对应关系;
20、按照所述目标叠加模式,根据所述控制扭矩、所述助力扭矩和所述目标斜率确定所述目标电机扭矩。
21、可选地,所述按照所述目标叠加模式,根据所述控制扭矩、所述助力扭矩和所述目标斜率确定所述目标电机扭矩包括:
22、将所述控制扭矩和所述助力扭矩进行叠加,得到第一待定扭矩;
23、按照所述目标斜率对所述第一待定扭矩进行坡度处理,得到所述目标电机扭矩。
24、可选地,所述按照所述目标叠加模式,根据所述控制扭矩、所述助力扭矩和所述目标斜率确定所述目标电机扭矩包括:
25、按照所述目标斜率对所述控制扭矩进行坡度处理,得到第二待定扭矩;
26、将所述第二待定扭矩和所述助力扭矩进行叠加,得到所述目标电机扭矩。
27、可选地,所述方法还包括:
28、根据所述目标电机扭矩确定目标控制电流;
29、按照所述目标控制电流控制所述车辆的电机,以使所述电机输出所述目标电机扭矩。
30、根据本公开实施例的第二方面,提供一种扭矩的确定系统,包括:电动助力转向系统eps和驾驶辅助系统,所述eps包括多个控制器,所述驾驶辅助系统与所述eps连接;
31、所述eps,用于接收所述驾驶辅助系统发送的扭矩控制信息,并根据所述扭矩控制信息从所述多个控制器中确定目标控制器,通过所述目标控制器确定所述扭矩控制信息对应的控制扭矩,并根据所述控制扭矩和车辆的助力扭矩确定目标电机扭矩。
32、可选地,所述eps还用于:
33、获取所述车辆的状态信息,所述状态信息指示所述eps的运行状态以及所述eps与所述驾驶辅助系统之间的交互状态;
34、在所述状态信息指示所述车辆未发生故障的情况下,根据所述扭矩控制信息从所述多个控制器中确定目标控制器。
35、可选地,所述eps还用于:
36、在所述状态信息指示所述车辆发生故障的情况下,确定所述控制扭矩为零。
37、可选地,所述eps还用于:
38、根据所述扭矩控制信息确定所述驾驶辅助系统的功能信息,所述功能信息指示所述驾驶辅助系统的行车功能;
39、根据所述功能信息、所述控制扭矩和车辆的助力扭矩确定目标电机扭矩。
40、可选地,所述eps还用于:
41、根据所述功能信息确定目标叠加模式;
42、在所述目标叠加模式指示执行扭矩坡度处理的情况下,根据预设坡度关系确定所述功能信息对应的目标斜率,所述预设坡度关系包括行车功能与斜率之间的对应关系;
43、按照所述目标叠加模式,根据所述控制扭矩、所述助力扭矩和所述目标斜率确定所述目标电机扭矩。
44、可选地,所述eps用于:
45、将所述控制扭矩和所述助力扭矩进行叠加,得到第一待定扭矩;
46、按照所述目标斜率对所述第一待定扭矩进行坡度处理,得到所述目标电机扭矩。
47、可选地,所述eps用于:
48、按照所述目标斜率对所述控制扭矩进行坡度处理,得到第二待定扭矩;
49、将所述第二待定扭矩和所述助力扭矩进行叠加,得到所述目标电机扭矩。
50、可选地,所述eps还用于:
51、根据所述目标电机扭矩确定目标控制电流;
52、按照所述目标控制电流控制所述车辆的电机,以使所述电机输出所述目标电机扭矩。
53、根据本公开实施例的第三方面,提供一种车辆,所述车辆包括本公开实施例第二方面所述的扭矩的确定系统。
54、通过上述技术方案,本公开中的eps包括多个控制器,eps首先接收驾驶辅助系统发送的扭矩控制信息,并根据扭矩控制信息从多个控制器中确定目标控制器,然后通过目标控制器确定扭矩控制信息对应的控制扭矩,并根据控制扭矩和车辆的助力扭矩确定目标电机扭矩。本公开中的eps根据驾驶辅助系统发送的扭矩控制信息,从多个控制器中确定车辆当前开启的行车功能对应的目标控制器,并通过目标控制器确定控制扭矩,针对驾驶辅助系统的多个行车功能,能够准确地得到每个行车功能对应的控制扭矩,从而提高了车辆转向控制的准确度。
55、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228228.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表