一种具有连续跳跃能力的球形移动机器人
- 国知局
- 2024-08-01 07:37:04
【】本发明涉及机器人技术,尤其涉及一种具有连续跳跃能力的球形移动机器人。
背景技术
0、背景技术:
1、几个世纪以来,人类开展了大量的太空探测任务,对未知的宇宙有了更深刻的认识。在过去的半个世纪里,人们对探索太阳系的地外栖息地或科研基地越来越感兴趣,尤其是地外生命的存在性的考察。目前人类发射到地外星球上的移动探测器均是着陆和工作在广阔平坦的地形上,然而那些存在生命和水源的证据则更有可能位于洞穴、峡谷、火山口等崎岖混乱的地形中。人类对这些区域的探测,将最有可能获得最大的科学回报。本发明提出的一种具有连续跳跃能力的球形机器人,将为机器人在空间探测技术的进一步发展做出贡献。
2、外星球环境常常具有高真空、低重力、强辐射、高低温交变、多粉尘等特点,而球形机器人的封闭外壳对内部机构具有天然的保护作用,同时由于球形几何形状的全对称性,因此不存在倾覆问题,非常适用于外星球陡峭斜坡上行驶。然而传统的球形移动机器人只具备滚动能力,这限制了其越障性能不及腿式机器人灵活。因此本发明在保持传统球形移动机器人的原有优势的前提下,创新性提出具有连续跳跃能力的新型机构方案,反向利用外星球低/微重力环境特点使机器人具备比地面更高的越障性能。同时值得注意的是,相比于旋翼飞行,跳跃运动不依赖与外星球表面是否存在足够的空气;相比于喷射移动,跳跃运动不需要携带额外的燃料;滚动和跳跃运动的结合将在满足任务要求的前提下大大降低机器人的能耗需求,可适应多种外星球环境。本发明将为我国探索地外星球崎岖复杂地形提供新的技术参考,有助于保持和提升我国太空探测领域技术在全世界范围内的领导优势。
技术实现思路
0、技术实现要素:
1、有鉴于此,本发明实施例提供了一种具有连续跳跃能力的球形移动机器人,用以解决现有技术中对外星球复杂崎岖地形探测能力弱的问题。
2、本发明实施例提供了一种具有连续跳跃能力的球形移动机器人,包括:
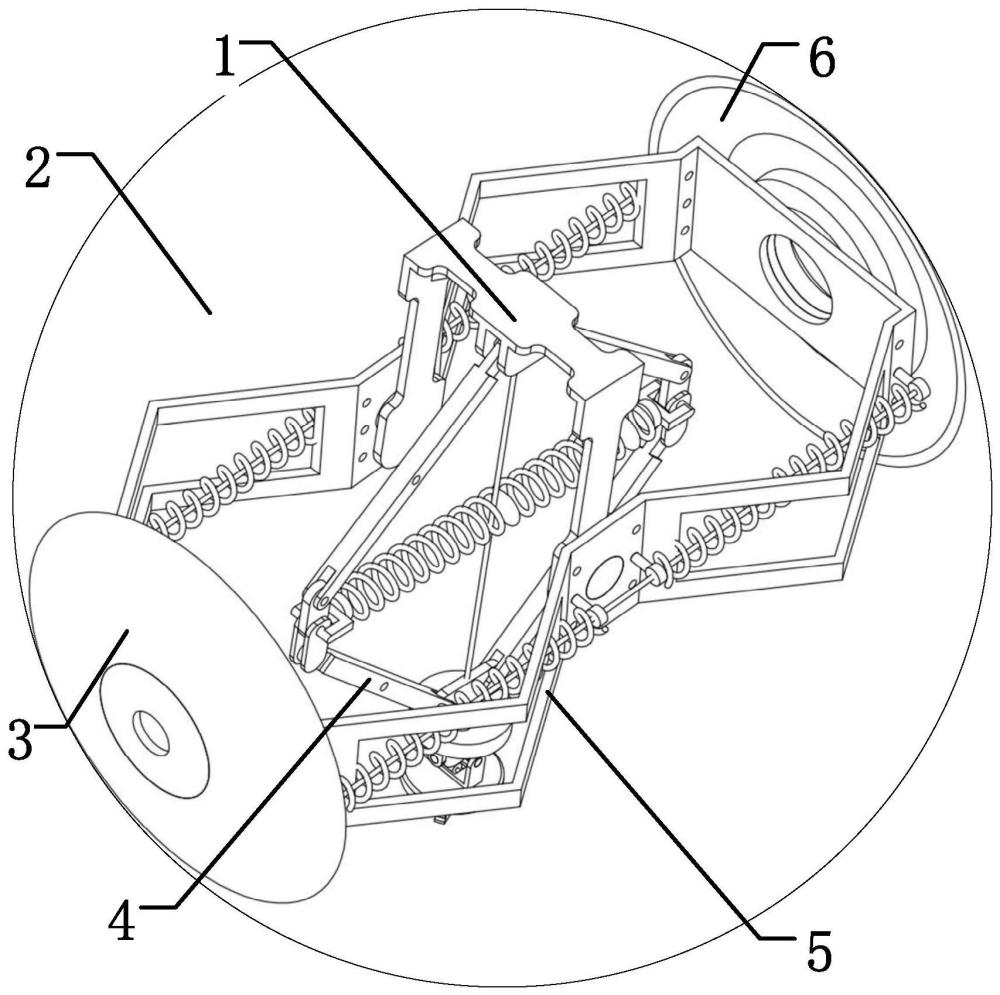
3、所述一种具有连续弹跳能力的球形移动机器人,其特征在于,所述机器人包括:复合机构弹性球壳、左球冠、右球冠、长轴框架、短轴框架和五连杆弹跳机构。
4、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式。
5、所述复合机构弹性球壳与左球冠和右球冠固连,其特征在于,左右球冠是内部驱动机构的支撑平台,左右球冠的设计便于机器人的制造、安装和拆卸维护。
6、所述长轴框架一端外侧通过长轴框架驱动电机与左球冠连接器连接,另一端外侧通过电滑环与能源和控制系统连接,能源和控制系统与右球冠连接器固连,右球冠连接器与右球冠固连;该设计的有益之处在于,可保证球形机器人左右两端有效质量的平衡,同时能源与控制系统安装在侧面便于对外接口的设计,在充电或调试时减少机器人的拆卸或方便进行有线调试。
7、所述短轴框架一端通过轴承与长轴框架连接,另一端通过短轴驱动电机与长轴框架连接。
8、所述复合机构弹性球壳,其特征包括,所述球壳由弹性铰链、高强度弹性薄板骨架、分段式轮刺和柔性球壳组成,弹性铰链安装在薄板骨架内侧,薄板骨架外侧与柔性球壳和分段式轮刺固连。
9、所述弹性铰链和高强度弹性薄板骨架的设计,目的在于为柔性球形结构提供足够强度的支撑以及弹性蓄能,防止柔性球形结构发生塑性变形;所述分段式轮刺的设计目的在于,提高球壳与地面的牵引力,防止球壳打滑。
10、所述长轴框架具有折展能力,并通过压簧和绳索机构进行释放收缩,压簧使长轴框架具有恢复原先结构的能力,而通过收缩绳索可使得长轴框架进行收缩,复合机构弹性球壳将随着长轴框架的释放收缩而变形,实现弹性蓄能。
11、所述压簧安装在长轴框架长轴方向,压簧两端分别与长轴框架上的连接支座固连。所述绳索穿过压簧和连接支座中心,绳索一端与长轴框架右侧面固连,绳索另一端与绳索驱动电机连接。
12、所述五连杆弹跳机构也具有折叠释放能力,拉簧结构使得五连杆机构自然非受力状态下处于伸长状态,绳索机构则用于五连杆弹跳机构的弹性蓄力收缩。
13、所述拉簧与五连杆对称轴共线安装,拉簧两端分别与五连杆固连。所述绳索与拉簧垂直,从拉簧间隙间穿过,绳索一端与五连杆基座固连,另一端与五连杆绳索驱动电机连接。
14、所述末端执行器包括能源备份、探测用的传感仪器、无线通信装置等,作为所述球形移动机器人滚动和跳跃的重摆机构,以保证机器人摆式偏心力矩驱动的实现以及整体有效载荷的提升。
15、由以上技术方案可以看出,本发明实施例具有以下有益效果:
16、根据本发明实施例提供的技术方案,可实现球形移动机器人的连续跳跃能力,从而能够解决现有技术中对外星球复杂崎岖地形探测能力弱的问题,能够满足复杂未知的外星球多级障碍越障探测任务需求,进一步提高机器人的机动性能,提高作业效率。
技术特征:1.一种具有连续弹跳能力的球形移动机器人,其特征在于,所述机器人包括:短轴框架、复合机构弹性球壳、左球冠、右球冠、长轴框架和五连杆弹跳机构;所述复合机构弹性球壳与左球冠和右球冠固连;所述长轴框架一端外侧通过长轴框架驱动电机与左球冠连接器连接,另一端外侧通过电滑环与能源和控制系统连接,能源和控制系统与右球冠连接器固连,右球冠连接器与右球冠固连;所述短轴框架一端通过轴承与长轴框架连接,另一端通过短轴驱动电机与长轴框架连接。
2.根据权利要求1所述复合机构弹性球壳,其特征包括,所述球壳由弹性铰链、高强度弹性薄板骨架、分段式轮刺和柔性球壳组成,弹性铰链安装在薄板骨架内侧,薄板骨架外侧与柔性球壳和分段式轮刺固连。
3.依据权利要求1所述,其特征包括,所述长轴框架具有折展能力,并通过压簧和绳索机构进行释放收缩,压簧使长轴框架具有恢复原先结构的能力,而通过收缩绳索可使得长轴框架进行收缩,复合机构弹性球壳将随着长轴框架的释放收缩而变形,实现弹性蓄能。
4.根据权利要求1所述,其特征在于,所述五连杆弹跳机构也具有折叠释放能力,拉簧结构使得五连杆机构自然非受力状态下处于伸长状态,绳索机构则用于五连杆弹跳机构的弹性蓄力收缩。
5.根据权利要求3和权利要求4所述,其特征在于,所述球形移动机器人内部具有两种独立的弹跳蓄能机构,可实现球形机器人在滚动过程中的连续跳跃需求,在面对复杂未知的外星球环境中可跨越多级障碍,具有极高的机动性能。
技术总结本发明提供了一种具有高蓄能质量比可连续跳跃的球形移动机器人设计方案,属于移动机器人领域,首先,可变形球壳和可收缩释放长轴框架作为第一层蓄能机构;其次,安装在短轴框架上五连杆弹跳机构作为第二层蓄能;两种蓄能结构采用了统一的弹簧绳索机构作为驱动,便于控制;本发明具有滚动和跳跃多种运动形式,既保留了球形移动机器人全向移动和全封闭性的优势特点,同时克服了传统球形机器人越障能力弱的缺点。本发明在服役环境恶劣的外星球探测中具有深远的应用前景。技术研发人员:孙汉旭,李明刚,马龙,孙萍受保护的技术使用者:北京邮电大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/228227.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表