一种面向无人驾驶的集群分布式农用车
- 国知局
- 2024-08-01 07:29:43
本技术涉及无人集群机器人,尤其涉及一种面向无人驾驶的集群分布式农用车。
背景技术:
1、随着我国农业生产力及生产水平的提升,传统农业耕作模式已无法适应现代农业发展需求,目前,中国农业机械化已经进入稳定发展期,但我国农业机械化和农机装备产业落后,特别是农机科技创新能力不强,农业装备受工作环境影响较大,缺少智能农业设备的协同工作,集群机器人的灵感来源于自然界的自组织系统,例如社交昆虫,鱼类或鸟群,它们都是基于简单本地交互规则的涌现性群体行为,集群机器人对该行为进行研究并提取出了工程原理,从而构建具有类似性能的多机器人系统,但我国对于集群应用还停留在相当受限的领域中。
2、从核心市场来看,我国为全球主要的农业无人车消费市场之一,且对农业无人车的需求也在稳步增加,从农耕人口来看,我国人口不断向城市迁移,大面积土地无人耕种,土地资源浪费严重,从现有农业设备来看,传统农机设备并不适用于受限环境中,集群智能体农业设备应用于未来农业是必然趋势,因此,本实用新型提出一种面向无人驾驶的集群分布式农用车用以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本实用新型的目的在于提出一种面向无人驾驶的集群分布式农用车,解决目前的农业作业过程中单一作业的大型农机设备效率较低,而采购多个设备成本又过高,以及大型农业设备无法工作在狭小环境,由于部分果蔬需在大棚栽培,而大棚入口小,植间距窄,传统农机设备使用受限的问题。
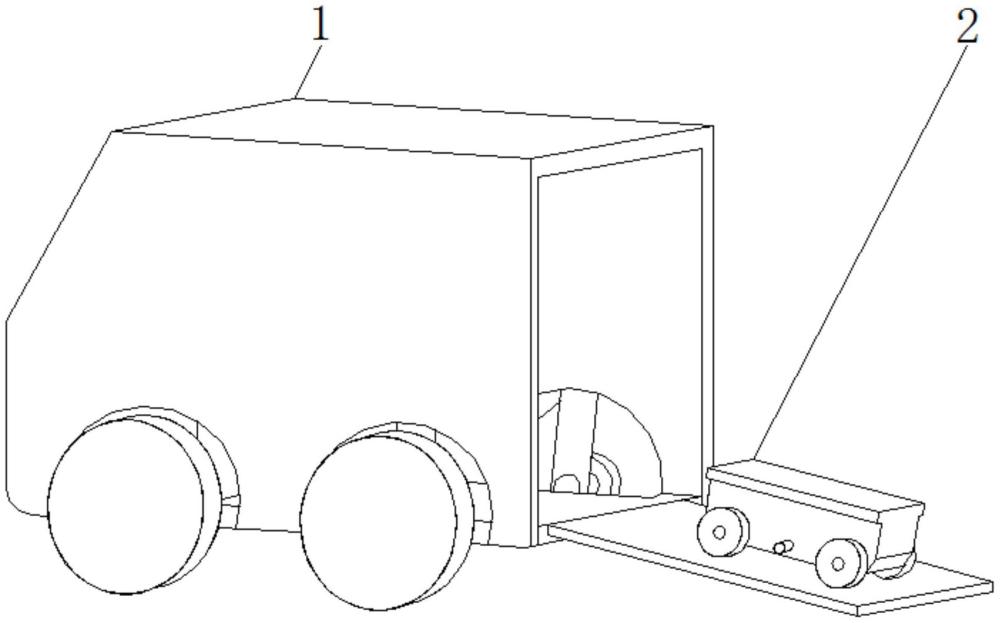
2、为了实现本实用新型的目的,本实用新型通过以下技术方案实现:一种面向无人驾驶的集群分布式农用车,包括主控车和集群小车,所述主控车上搭载有上位机平台,所述集群小车上搭载有下位机平台,所述主控车包括主控车体、控制模块、执行模块和监控模块,所述集群小车上安装有gps与北斗导航模块和深度相机,所述主控车体由独立悬挂车轮、车厢和箱门构成,所述集群小车装载于车厢内部,所述集群小车由整车车身和升降模块构成,所述整车车身下部装配有行走车轮,所述升降模块可拆卸安装于整车车身的尾部。
3、进一步改进在于:所述主控车的车厢尾部搭载大扭矩舵机并控制箱门起放,所述集群小车通过打开的箱门自主驶出主控车。
4、进一步改进在于:所述集群小车正常行驶时升降模块处于收缩状态,所述集群小车工作时升降模块处于拉伸状态,所述升降模块上还搭载有末端执行器。
5、进一步改进在于:所述集群小车上还装配有转向舵机、速度编码器、imu姿态传感器、电压传感器和无线传输模块,所述集群小车通过无线传输模块接收主控车下达的指令。
6、进一步改进在于:所述控制模块和监控模块利用ros分布式通信机制,实现对集群小车的分布式控制。
7、进一步改进在于:所述集群小车结合ros操作系统实现单独个体的全局路径规划,并根据当前路况生成实时行进的本地路径规划。
8、本实用新型的有益效果为:本实用新型包括主控车和集群小车,通过在主控车内搭载多辆集群小车,实现对农用车的集群化分布式设计,将传统农业作业过程中的一车多次作业转变为多车一次作业,由于集群车体积小,使得工作环境变得更加广泛,既可用在露天的农田环境中多车集群化工作,又可少车集群化工作于农用大棚等环境受限的场景,一定程度上提高了农业作业效率,并降低了设备使用成本,制得广泛推广应用。
技术特征:1.一种面向无人驾驶的集群分布式农用车,其特征在于:包括主控车和集群小车,所述主控车上搭载有上位机平台,所述集群小车上搭载有下位机平台,所述主控车包括主控车体、控制模块、执行模块和监控模块,所述集群小车上安装有gps与北斗导航模块和深度相机,所述主控车体由独立悬挂车轮、车厢和箱门构成,所述集群小车装载于车厢内部,所述集群小车由整车车身和升降模块构成,所述整车车身下部装配有行走车轮,所述升降模块可拆卸安装于整车车身的尾部。
2.根据权利要求1所述的一种面向无人驾驶的集群分布式农用车,其特征在于:所述主控车的车厢尾部搭载大扭矩舵机并控制箱门起放,所述集群小车通过打开的箱门自主驶出主控车。
3.根据权利要求1所述的一种面向无人驾驶的集群分布式农用车,其特征在于:所述集群小车正常行驶时升降模块处于收缩状态,所述集群小车工作时升降模块处于拉伸状态,所述升降模块上还搭载有末端执行器。
4.根据权利要求1所述的一种面向无人驾驶的集群分布式农用车,其特征在于:所述集群小车上还装配有转向舵机、速度编码器、imu姿态传感器、电压传感器和无线传输模块,所述集群小车通过无线传输模块接收主控车下达的指令。
5.根据权利要求1所述的一种面向无人驾驶的集群分布式农用车,其特征在于:所述控制模块和监控模块利用ros分布式通信机制,实现对集群小车的分布式控制。
6.根据权利要求1所述的一种面向无人驾驶的集群分布式农用车,其特征在于:所述集群小车结合ros操作系统实现单独个体的全局路径规划,并根据当前路况生成实时行进的本地路径规划。
技术总结本技术公开一种面向无人驾驶的集群分布式农用车,包括主控车和集群小车,主控车上搭载有上位机平台,集群小车上搭载有下位机平台;本技术通过在主控车内搭载多辆集群小车,实现对农用车的集群化分布式设计,将传统农业作业过程中的一车多次作业转变为多车一次作业,由于集群车体积小,使得工作环境变得更加广泛,既可用在露天的农田环境中多车集群化工作,又可少车集群化工作于农用大棚等环境受限的场景,一定程度上提高了农业作业效率,并降低了设备使用成本,制得广泛推广应用。技术研发人员:余涛,陈晓宁,孙明健受保护的技术使用者:安徽大学技术研发日:20231229技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/227687.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表