超高速低真空管道磁浮交通系统舱载设备控制系统的制作方法
- 国知局
- 2024-08-01 09:02:46
本发明涉及运行控制,尤其涉及一种超高速低真空管道磁浮交通系统舱载设备控制系统。
背景技术:
1、运行控制系统并不是针对于超高速低真空管道磁浮交通系统而独有的,对于轮轨交通及磁浮列车而言,运行控制系统已经历了长足的发展,目前已形成一套较为完整的体系。
2、目前的轮轨交通中,运行控制系统多采用ctcs3(多应用于城际铁路)和cbtc(多应用于城轨交通)制式,主要分为地面运控设备及车载运控设备,车载运控设备负责速度防护控制等,一般由车载安全计算机、连续信息通信模块、点式信息通信模块、列车接口单元等组成。车载设备通过列车接口单元获取列车上设备的状态,并通过它将制动和相关的控制命令输出。
3、中低速磁浮运控系统采用技术成熟先进的atc系统,由自动列车监控ats、计算机联锁系统、自动列车防护atp、自动列车运行ato、车地通信系统组成,车载设备的控制由atp进行控制,负责列车悬浮/降落控制、车门防护等。
4、在上海高速磁浮中,运行控制系统主要分为中央运控、分区运控、车载运控三个子系统,其中车载运控与其他子系统配合,一起协同工作保证列车安全。车载运控由车载安全计算机与车载传输计算机构成,车载安全计算机与车载控制装置通过数字输入/输出电路进行连接。
5、在日本山梨试验线低温超导磁浮列车中,按照功能把运行控制系统划分为运输控制、安全控制、驱动控制三个子系统,系统构成略显复杂。
6、由于当前技术成熟的轮轨、磁浮运行控制系统不能完全应用于超高速低真空管道磁浮交通系统。新技术带来的故障模式更多,分析过程较为复杂、分析覆盖范围不够全面且分析出来应对措施无法进行充分验证。同时涉及悬浮控制等,不同故障模式对应的系统“故障安全侧”不相同。
技术实现思路
1、本发明提供了一种超高速低真空管道磁浮交通系统舱载设备控制系统,能够解决现有技术中的问题。
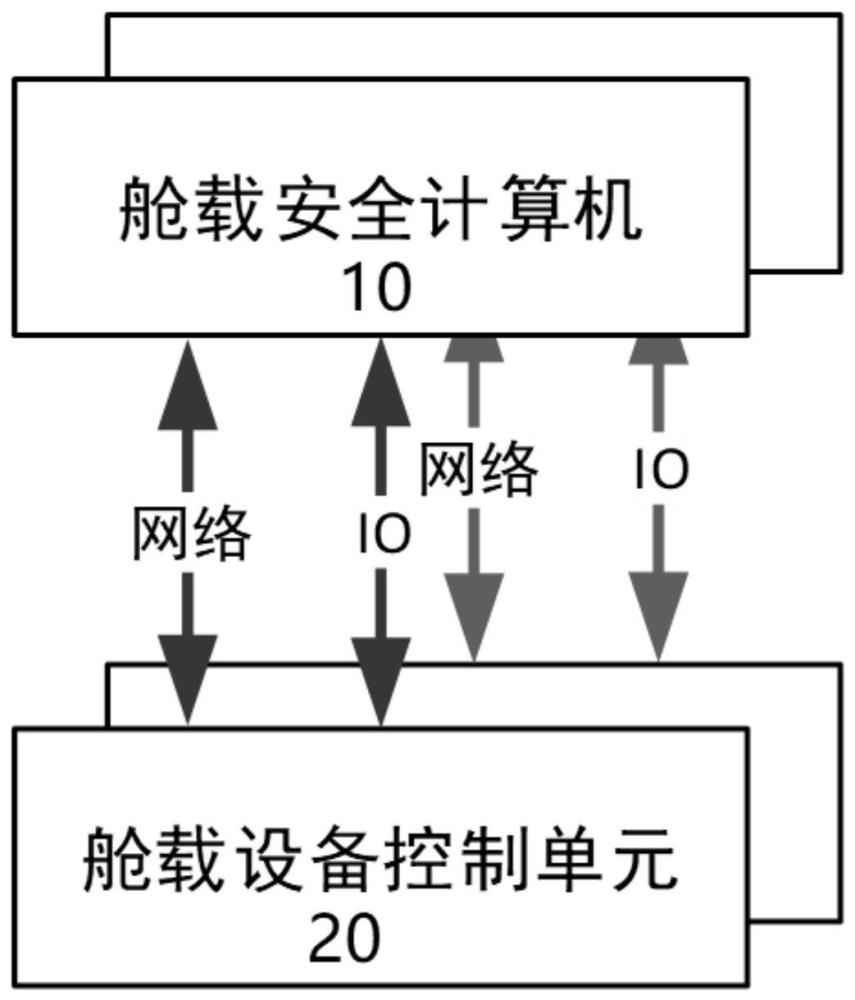
2、本发明提供了一种超高速低真空管道磁浮交通系统舱载设备控制系统,其中,该系统包括:
3、舱载安全计算机,用于输出施加控制信号和不施加控制信号;
4、舱载设备控制单元,与所述舱载安全计算机连接,用于接收施加控制信号和不施加控制信号,根据施加控制信号和不施加控制信号判断舱载安全计算机的状态,并根据判断结果确定是否输出控制信号。
5、优选地,根据施加控制信号和不施加控制信号判断舱载安全计算机的状态包括:
6、如果施加控制信号的状态和不施加控制信号的状态均为无效,则判断舱载安全计算机处于上电后的初始状态或异常状态;
7、如果施加控制信号的状态为无效而不施加控制信号的状态为有效,则判断安全计算机处于正常输出不施加控制信号的状态;
8、如果施加控制信号的状态为有效而不施加控制信号的状态为无效,则判断安全计算机处于正常输出施加控制信号的状态;
9、如果施加控制信号的状态和不施加控制信号的状态均为有效,则判断安全计算机处于异常状态。
10、优选地,根据判断结果确定是否输出控制信号包括:
11、在舱载安全计算机处于上电后的初始状态的情况下,不输出控制信号;
12、在舱载安全计算机处于异常状态的情况下,保持上一控制信号输出;
13、在舱载安全计算机处于正常输出不施加控制信号的状态的情况下,输出指示不施加操作的控制信号;
14、在舱载安全计算机处于正常输出施加控制信号的状态的情况下,输出指示施加操作的控制信号。
15、优选地,所述舱载设备控制单元包括输入采集电路、第一安全处理电路、第二安全处理电路和输出电路,输入采集电路包括用于采集施加控制信号的第一继电器a和用于采集不施加控制信号的第二继电器b,第一安全处理电路包括第三继电器c,第二安全处理电路包括第四继电器d,输出电路包括第一常开节点和第二常开节点。
16、优选地,在舱载安全计算机处于上电后的初始状态的情况下,第一继电器a、第二继电器b、第三继电器c和第四继电器d均不吸合,第一常开节点和第二常开节点保持断开。
17、优选地,在舱载安全计算机处于正常输出施加控制信号的状态的情况下,第一继电器a和第三继电器c均吸合,第二继电器b和第四继电器d均不吸合,第一常开节点导通且第二常开节点保持断开。
18、优选地,在舱载安全计算机处于正常输出不施加控制信号的状态的情况下,第一继电器a和第三继电器c均不吸合,第二继电器b和第四继电器d均吸合,第一常开节点保持断开且第二常开节点导通。
19、优选地,在舱载安全计算机处于从正常输出施加控制信号的状态切换为异常状态的情况下,第一继电器a从吸合切换为不吸合,第二继电器b不吸合,第三继电器c保持吸合,第四继电器d保持不吸合,第一常开节点导通且第二常开节点保持断开。
20、优选地,所述舱载安全计算机和舱载设备控制单元通过以太网和硬接线连接。
21、通过上述技术方案,可以在正常运行场景下完成对舱载设备的控制;并且,在故障场景下,可以依据运控系统的故障应对措施完成对舱载设备的控制,即使舱载运控系统宕机也会保障系统故障安全下的输出。本发明解决了因超高速低真空管道磁浮交通系统技术不完全成熟、系统的故障情况及应对措施较多、“故障安全侧”不唯一的问题,为运行控制系统“运行指挥,安全防护”提供了基本保障。
技术特征:1.一种超高速低真空管道磁浮交通系统舱载设备控制系统,其特征在于,该系统包括:
2.根据权利要求1所述的系统,其特征在于,根据施加控制信号和不施加控制信号判断舱载安全计算机的状态包括:
3.根据权利要求2所述的系统,其特征在于,根据判断结果确定是否输出控制信号包括:
4.根据权利要求3所述的系统,其特征在于,所述舱载设备控制单元包括输入采集电路、第一安全处理电路、第二安全处理电路和输出电路,输入采集电路包括用于采集施加控制信号的第一继电器a和用于采集不施加控制信号的第二继电器b,第一安全处理电路包括第三继电器c,第二安全处理电路包括第四继电器d,输出电路包括第一常开节点和第二常开节点。
5.根据权利要求4所述的系统,其特征在于,在舱载安全计算机处于上电后的初始状态的情况下,第一继电器a、第二继电器b、第三继电器c和第四继电器d均不吸合,第一常开节点和第二常开节点保持断开。
6.根据权利要求4所述的系统,其特征在于,在舱载安全计算机处于正常输出施加控制信号的状态的情况下,第一继电器a和第三继电器c均吸合,第二继电器b和第四继电器d均不吸合,第一常开节点导通且第二常开节点保持断开。
7.根据权利要求4所述的系统,其特征在于,在舱载安全计算机处于正常输出不施加控制信号的状态的情况下,第一继电器a和第三继电器c均不吸合,第二继电器b和第四继电器d均吸合,第一常开节点保持断开且第二常开节点导通。
8.根据权利要求4所述的系统,其特征在于,在舱载安全计算机处于从正常输出施加控制信号的状态切换为异常状态的情况下,第一继电器a从吸合切换为不吸合,第二继电器b不吸合,第三继电器c保持吸合,第四继电器d保持不吸合,第一常开节点导通且第二常开节点保持断开。
9.根据权利要求1-8中任一项所述的系统,其特征在于,所述舱载安全计算机和舱载设备控制单元通过以太网和硬接线连接。
技术总结本发明涉及运行控制技术领域,公开了一种超高速低真空管道磁浮交通系统舱载设备控制系统。其中,该系统包括:舱载安全计算机,用于输出施加控制信号和不施加控制信号;舱载设备控制单元,与所述舱载安全计算机连接,用于接收施加控制信号和不施加控制信号,根据施加控制信号和不施加控制信号判断舱载安全计算机的状态,并根据判断结果确定是否输出控制信号。本发明解决了因超高速低真空管道磁浮交通系统技术不完全成熟、系统的故障情况及应对措施较多、“故障安全侧”不唯一的问题,为运行控制系统“运行指挥,安全防护”提供了基本保障。技术研发人员:毛凯,张艳清,张鹏举,石贺,王松林,宋悦熙,李萍受保护的技术使用者:中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院)技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240718/234595.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表