一种基于人机混合智能的地铁列车无人驾驶控制方法
- 国知局
- 2024-08-01 09:02:56
本发明属于城市轨道交通列车运行控制,具体涉及一种基于人机混合智能的地铁列车无人驾驶控制方法。
背景技术:
1、无人驾驶可按列车自动化水平分为5个等级:goa0、goa1、goa2、goa3、goa4。目前我国大部分城市采用的是goa2,运行中仍需要司机下达关门与发车指令;goa3只配备一名监督人员进行全自动驾驶;尽管goa4级别的无人驾驶已经能够完全解放地铁运行过程中的人类劳动力,但其在安全性上仍然不如有人监管的自动驾驶系统。
2、虽然经过大量训练的智能体已经足以胜任常规运行任务,但是对于各种突发状况,智能体的处理能力仍然不足。因为深度学习目前来说仍然是一个可解释性差的黑盒,遇到突发问题导致列车自动驾驶系统出现故障时,专家们也很难对其做出解释进而优化纠错。因此,如何让列车做到在无人监管时自行处理突发情况,并做到自学习以增强泛化性,是当前研究的重点和难点。
3、综上所述,如何有效地解决突发情况时列车运行安全性不高的问题,是目前本领域技术人员急需解决的问题。
技术实现思路
1、为了克服以上问题,本发明的目的在于提供一种基于人机混合智能的地铁列车无人驾驶控制方法。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、一种基于人机混合智能的地铁列车无人驾驶控制方法,包括:
4、1)搭建地铁列车无人驾驶的虚拟场景;
5、2)构建列车运行的场景库,对列车的运行场景进行划分,分为常规场景与特殊场景两大类;
6、3)采用强化学习对列车智能体进行训练,利用训练后的列车智能体对驾驶状态进行智能控制;
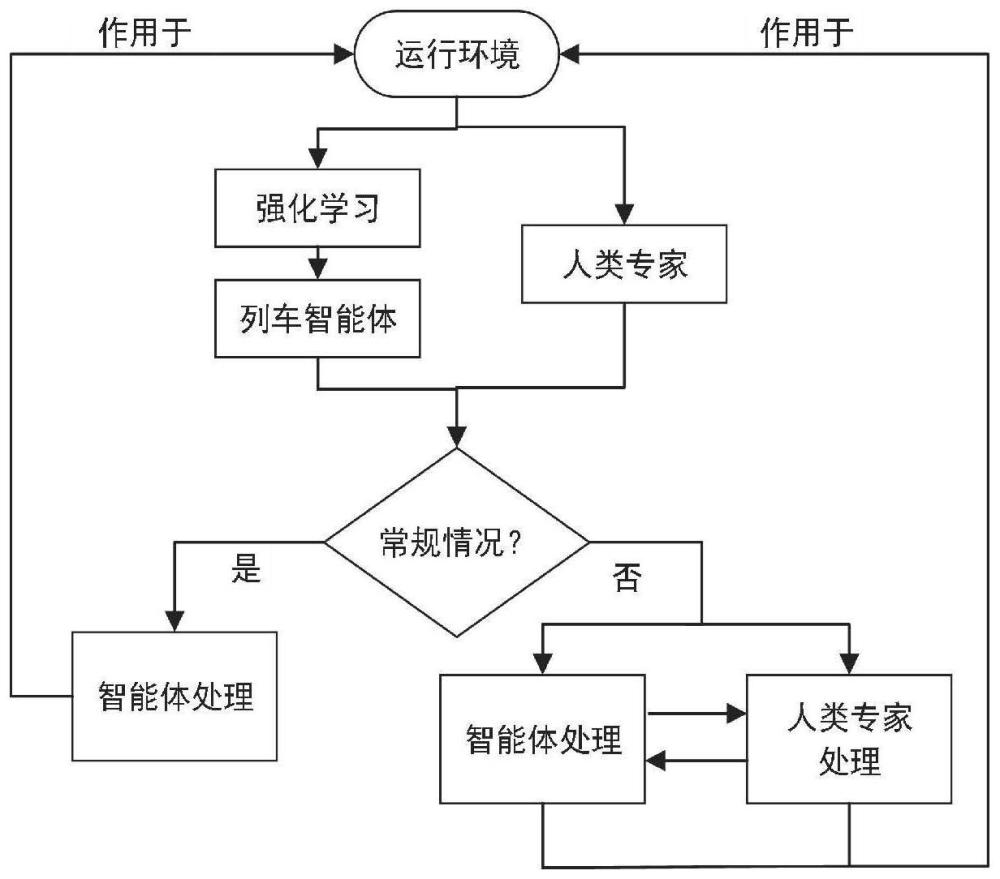
7、4)根据列车智能体对环境场景的判断结果,确定采用专家经验或列车智能体控制。
8、作为一种可能的实施方式,进一步,步骤1)搭建地铁列车无人驾驶的虚拟场景,具体为:
9、在unity 3d仿真软件中搭建地铁列车无人驾驶的虚拟场景,在场景视图中添加各种物体进行场景搭建,环境搭建完成后可在游戏视图中查看列车的运行场景。
10、作为一种可能的实施方式,进一步,步骤2)中所述列车运行的场景库,包括:
11、场景一:列车正常行驶于无障碍路段,列车智能体实时检测地铁列车的运行情况,并收集列车的各项运行参数;
12、场景二:列车运行过程中前方轨道出现障碍物,当轨道上障碍物进入碰撞检测器的检测范围内时,列车能够及时的进行减速直至在障碍物前方停下;
13、场景三:列车前方出现障碍物的同时后方出现可能追尾的列车;
14、其中,场景一为常规场景;场景二、场景三为特殊场景。
15、作为一种可能的实施方式,进一步,步骤3)中采用强化学习对列车智能体进行训练,具体为:
16、获取各环境场景中列车的运行参数,并对运行参数进行综合,运用强化学习对智能体进行训练。
17、作为一种可能的实施方式,进一步,所述运行参数包括列车速度、加速度、运行阻力、剩余路程等参数。
18、作为一种可能的实施方式,进一步,步骤4)中根据列车智能体对环境场景的识别结果,确定采用专家经验或列车智能体控制;具体为:
19、列车智能体判断环境场景是否为常规场景,若是,则通过列车智能体控制进行控制;若否,则通过专家经验进行决策判断。
20、作为一种较优的实施方式,优选的,专家经验下达判断决策后,通过列车智能体计算出具体加速度或制动速度。
21、作为一种可能的实施方式,进一步,当列车智能体判断环境场景不是常规场景时,列车控制方法具体如下:
22、当列车运行过程中前方出现障碍物,若障碍物距离小于设定的距离阈值,列车智能体根据目前运行状态计算,判断列车撞上障碍物的时长小于设定时间阈值时,则列车根据专家经验采取紧急制动,以尽量避免撞上障碍物或尽量减小动量以降低碰撞损伤。
23、当列车前方障碍物距离大于设定的距离阈值,列车智能体根据目前运行状态计算,判断列车碰撞障碍物的时长大于设定时间阈值时,则由智能体计算制动速度,使列车在安全距离之前停车即可,这样一来,既能保证列车运行安全,也能保证车上乘客不会因紧急制动而受伤,同时也能减少列车组件的损耗。
24、后方出现可能追尾的列车同时前方出现障碍物的情况下,当后方列车距离大于设定距离阈值且后方列车正在制动而前方障碍物距离小于设定的距离阈值时,则优先减少前方障碍物可能造成的危险,进行紧急制动;若后方列车距离小于设定的距离阈值且速度大于设定的速度阈值而前方障碍物距离大于设定的距离阈值,则控制车速使列车与后方车保持距离,待后方列车成功制动后再进行本列车制动。
25、相比现有技术,本发明具有如下有益效果:
26、1)本发明提出了将数据驱动智能和人类专家经验有机融合的地铁列车智能无人驾驶系统,在确保安全性的前提下,提高列车驾驶的综合性能。
27、2)本发明提出一种基于场景库的人机控制权协调分配方法,通过对场景的确定,将场景判断为常规场景或特殊场景,进而确定采用专家经验或是智能控制,在保证列车运行的智能化的同时提高了安全性。
28、3)本发明通过构建列车运行过程的场景库,将列车运行过程中可能发生的情况进行划分,场景的创建可以自定义,保证了一定的泛化性。
技术特征:1.一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,包括:
2.根据权利要求1所述的一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,步骤1)搭建地铁列车无人驾驶的虚拟场景,具体为:
3.根据权利要求1所述的一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,步骤2)中所述列车运行的场景库,包括:
4.根据权利要求1所述的一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,步骤3)中采用强化学习对列车智能体进行训练,具体为:
5.根据权利要求4所述的一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,所述运行参数包括列车速度、加速度、运行阻力、剩余路程。
6.根据权利要求3所述的一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,步骤4)中根据列车智能体对环境场景的识别结果,确定采用专家经验或列车智能体控制;具体为:
7.根据权利要求6所述的一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,专家经验下达判断决策后,通过列车智能体计算出具体加速度或制动速度。
8.根据权利要求6所述的一种基于人机混合智能的地铁列车无人驾驶控制方法,其特征在于,当列车智能体判断环境场景不是常规场景时,列车控制方法具体如下:
技术总结本发明公开了一种基于人机混合智能的地铁列车无人驾驶控制方法,运用人机混合智能解决地铁列车无人驾驶,合理安排专家(远程控制)与智能体的协调工作;通过对场景权值的确定,将场景判断为常规场景或特殊场景,进而确定采用专家经验或是智能控制;构建列车运行过程的场景库,将列车运行过程中可能发生的情况进行划分,场景的创建可以自定义,保证了一定的泛化性。本发明提出的将数据驱动智能和人类专家经验有机融合的地铁列车智能无人驾驶系统,在确保安全性的前提下,提高了列车驾驶的综合性能,可进一步推广应用。技术研发人员:陈德旺,周佳丽,陈远东,郑少峰,赵文迪受保护的技术使用者:福建理工大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240718/234606.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。