一种列车巡检系统与方法与流程
- 国知局
- 2024-08-01 09:08:26
本申请涉及城市轨道交通车辆维护,尤其涉及一种列车巡检系统与方法。
背景技术:
1、
2、为保证巡检人员的安全,同时降低巡检人员的工作量,实际生活中,通过采用巡检机器人采集列车图像,以代理巡检人员完成工作。然而,这种方法的缺陷在于,巡检机器人的所采集的图像普遍较为模糊,且由于图像视角单一,不能较为准确的反映列车的实际情况,使得巡检结果的准确性较低。
技术实现思路
1、本申请实施例提供一种列车巡检系统与培训方法,用以解决当前的雷车巡检结果准确性低的技术问题。
2、为解决上述技术问题,本申请实施例提供以下技术方案:
3、本申请提供一种列车巡检系统,包括:
4、列车巡检机器人,所述列车巡检机器人有多台,分别设置于列车车顶、列车车底,以及列车两侧;
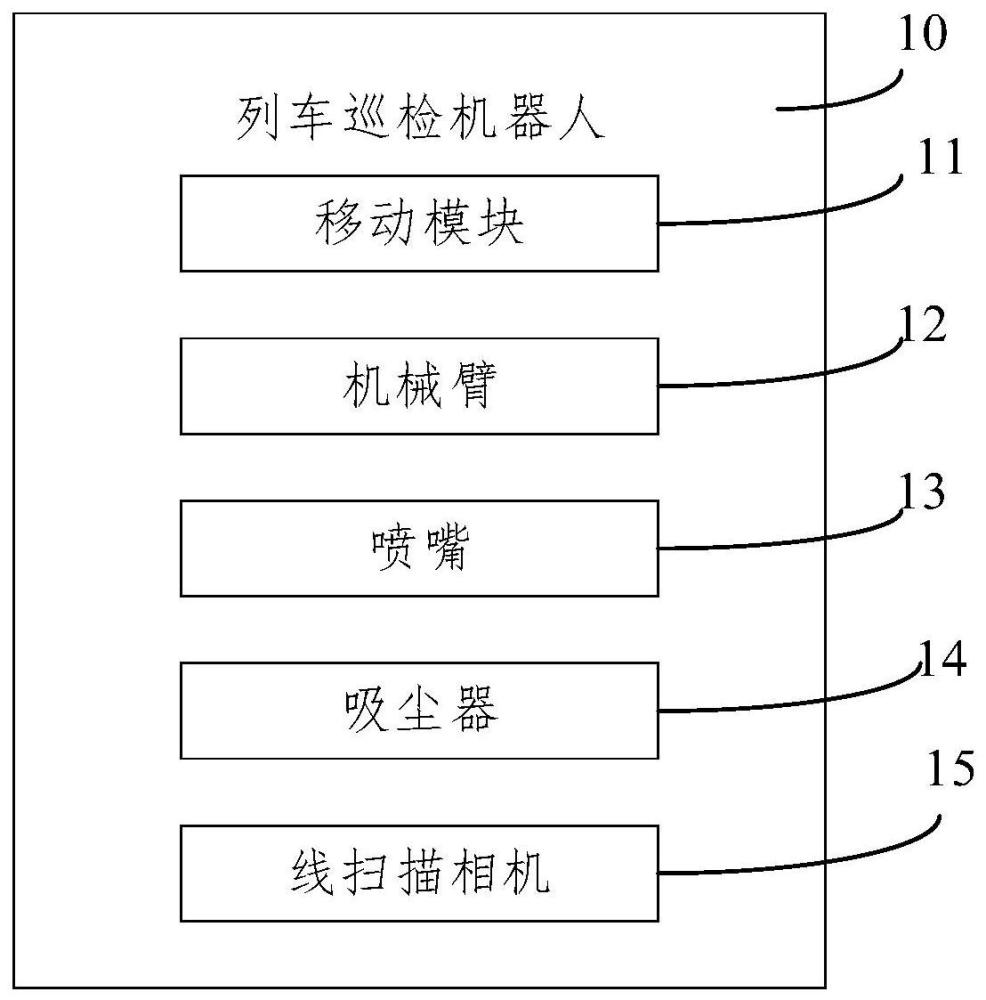
5、所述列车巡检机器人包括:
6、移动模块,用于控制所述列车巡检机器人按照预设路线行驶;
7、机械臂,与所述移动模块连接,所述机械臂被配置为根据预设轨迹调整姿态;
8、线扫描相机,设置于机械臂上,所述线扫描相机被配置为在所述机械臂的不同姿态下,拍摄多个视角下的列车部件的图像。
9、进一步地,上述列车巡检系统,其中,所述预设轨迹包括清扫轨迹,所述机械臂上设置有喷嘴,所述喷嘴用于按照所述清扫轨迹向所述列车部件喷出气流,以吹起所述列车部件的表面灰尘。
10、进一步地,上述列车巡检系统,其中,所述机械臂上还设置有吸尘器,当所述喷嘴吹起所述列车部件的表面灰尘时,所述吸尘器用于对吹起的灰尘进行吸附。
11、进一步地,上述列车巡检系统,其中,所述系统还包括多个显示模块,所述多个显示模块沿所述预设路线设置,所述列车巡检机器人上设置有扫码器;
12、所述显示模块用于显示指令标签,所述扫码器用于扫描所述指令标签,所述列车巡检机器人根据所述指令标签中的指令执行预设操作调整所述机械臂的姿态。
13、进一步地,上述列车巡检系统,其中,所述系统还包括磁条与磁传感器,所述磁条沿列车方向设置于列车车顶、列车车底,以及列车两侧,所述磁传感器设置于移动模块底部,所述列车巡检机器人通过所述磁传感器沿磁条方向直线往返运动。
14、本申请还提供一种列车巡检方法,包括:
15、将多台列车巡检机器人分别设置于列车车顶、列车车底,以及列车两侧;
16、控制所述列车巡检机器人按照预设路线行驶;
17、在行驶过程中,根据预设轨迹调整所述巡检机器人的机械臂的姿态,并在所述机械臂的不同姿态下,拍摄多个视角下的列车部件的图像。
18、进一步地,上述列车巡检方法,其中,所述预设轨迹包括清扫轨迹,所述机械臂上设置有喷嘴,所述根据预设轨迹调整所述巡检机器人的机械臂的姿态,并在所述机械臂的不同姿态下,拍摄多个视角下的列车部件的图像的步骤之前,包括:
19、按照所述清扫轨迹控制所述喷嘴向所述列车部件喷出气流,以吹起所述列车部件的表面灰尘。
20、进一步地,上述列车巡检方法,其中,所述机械臂上还设置有吸尘器,所述方法还包括:
21、当所述喷嘴吹起所述列车部件的表面灰尘时,控制所述吸尘器对吹起的灰尘进行吸附。
22、进一步地,上述列车巡检方法,其中,所述列车巡检机器人上设置有扫码器,所述方法还包括:
23、沿所述预设路线设置显示模块;其中,所述显示模块用于显示指令标签;
24、控制所述扫码器扫描所述指令标签,所述列车巡检机器人根据所述指令标签中的指令执行预设操作调整所述机械臂的姿态。
25、进一步地,上述列车巡检方法,其中,所述吸尘器包括浓度传感器,所述当所述喷嘴吹起所述列车部件的表面灰尘时,控制所述吸尘器对吹起的灰尘进行吸附的步骤之后,包括:
26、通过所述浓度传感器检测灰尘浓度;
27、若灰尘浓度大于预设的清洁标准,则控制所述喷嘴再次向所述列车部件喷出气流,吹起所述列车部件的表面灰尘,并控制所述吸尘器对吹起的灰尘进行吸附,再次检测灰尘浓度,直至所述灰尘浓度小于或等于预设的清洁标准。
28、有益效果:本申请提供一种列车巡检系统与方法,本申请将线扫描相机设置于机械臂上,根据预设轨迹调整机械臂的姿态,使得线扫描相机可以拍摄多个视角下的列车部件的图像,进而提高巡检结果的准确性。
技术特征:1.一种列车巡检系统,其特征在于,包括:
2.根据权利要求1所述的列车巡检系统,其特征在于,所述预设轨迹包括清扫轨迹,所述机械臂上设置有喷嘴,所述喷嘴用于按照所述清扫轨迹向所述列车部件喷出气流,以吹起所述列车部件的表面灰尘。
3.根据权利要求2所述的列车巡检系统,其特征在于,所述机械臂上还设置有吸尘器,当所述喷嘴吹起所述列车部件的表面灰尘时,所述吸尘器用于对吹起的灰尘进行吸附。
4.根据权利要求1所述的列车巡检系统,其特征在于,所述系统还包括多个显示模块,所述多个显示模块沿所述预设路线设置,所述列车巡检机器人上设置有扫码器;
5.根据权利要求1所述的列车巡检系统,其特征在于,所述系统还包括磁条与磁传感器,所述磁条沿列车方向设置于列车车顶、列车车底,以及列车两侧,所述磁传感器设置于移动模块底部,所述列车巡检机器人通过所述磁传感器沿磁条方向直线往返运动。
6.一种列车巡检方法,其特征在于,包括:
7.根据权利要求6所述的列车巡检方法,其特征在于,所述预设轨迹包括清扫轨迹,所述机械臂上设置有喷嘴,所述根据预设轨迹调整所述巡检机器人的机械臂的姿态,并在所述机械臂的不同姿态下,拍摄多个视角下的列车部件的图像的步骤之前,包括:
8.根据权利要求7所述的列车巡检方法,其特征在于,所述机械臂上还设置有吸尘器,所述方法还包括:
9.根据权利要求6所述的列车巡检方法,其特征在于,所述列车巡检机器人上设置有扫码器,所述方法还包括:
10.根据权利要求8所述的列车巡检方法,其特征在于,所述吸尘器包括浓度传感器,所述当所述喷嘴吹起所述列车部件的表面灰尘时,控制所述吸尘器对吹起的灰尘进行吸附的步骤之后,包括:
技术总结本申请提供一种列车巡检系统与方法,该系统包括:列车巡检机器人,所述列车巡检机器人有多台,分别设置于列车车顶、列车车底,以及列车两侧;所述列车巡检机器人包括:移动模块,用于控制所述列车巡检机器人按照预设路线行驶;机械臂,与所述移动模块连接,所述机械臂被配置为根据预设轨迹调整姿态;线扫描相机,设置于机械臂上,所述线扫描相机被配置为按照预设轨迹在所述机械臂的不同姿态下,拍摄多个视角下的列车部件的图像。本申请将线扫描相机设置于机械臂上,根据预设轨迹调整机械臂的姿态,使得线扫描相机可以拍摄多个视角下的列车部件的图像,进而提高巡检结果的准确性。技术研发人员:占俊,雷崇,王俊,姚应峰,廖永亮,胡立翔,石航,张明,葛红,程春阳,王德威,李亚强,陈东,张昕,杨鸿泰受保护的技术使用者:中铁第四勘察设计院集团有限公司技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240718/235063.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。