一种高架梁腹自动化巡检设备的制作方法
- 国知局
- 2024-08-01 09:08:26
本技术涉及轨道交通设计,具体涉及一种高架梁腹自动化巡检设备。
背景技术:
1、目前轨道交通中,高架桥梁腹巡检主要由人工在梁腹内爬行巡检,人工巡检的作业模式存在空间狭小、作业强度高、巡检方式落后等问题。主要的问题有:
2、1.作业环境狭小且供氧不足
3、箱梁内空间矮小狭窄,入口处仅0.7米,桥梁梁腹内最高处也仅1.2米,需爬行进行巡检,人员作业难度较大。以广州地铁金洲站至蕉门站区间跨蕉门河的高架桥例,该段高架桥以三段三跨一联的连续梁组合而成,总长360米,该连续梁只有在两端各有一个进入口,维修作业人员需要在连续梁中部作业时最远要在箱梁内爬进160米,且梁腹内只有几个直径约10厘米排水孔兼顾通风通气功能,箱内氧气供给不足。
4、2.巡检时间长、劳动强度大
5、根据桥梁梁腹日常巡检作业指导书内容:巡检时每组不少于2人作业,全线巡检速度一般情况下平均不大于100m/h。一般每次巡检约300-400米,需在梁腹内作业3-4个小时,且作业过程不能站立,需要弯腰爬行巡检,作业劳动强度非常大,高温高噪声环境下长期作业会对人体造成伤害。
6、3.人工巡检模式落后
7、高架桥梁腹的巡检采用纯人工目视巡检的方式,单条每年要进行2次巡检,巡检成本高,检修方式更为落后,巡检结果记录停留在纸质记录,对病害发展难以全程追溯,难以实施精准维修。
技术实现思路
1、为了克服上述技术缺陷,本实用新型提供一种高架梁腹自动化巡检设备,其能大幅提升巡检效率,同时有效减轻巡检人员劳动强度及身心伤害。
2、为了解决上述问题,本实用新型按以下技术方案予以实现:
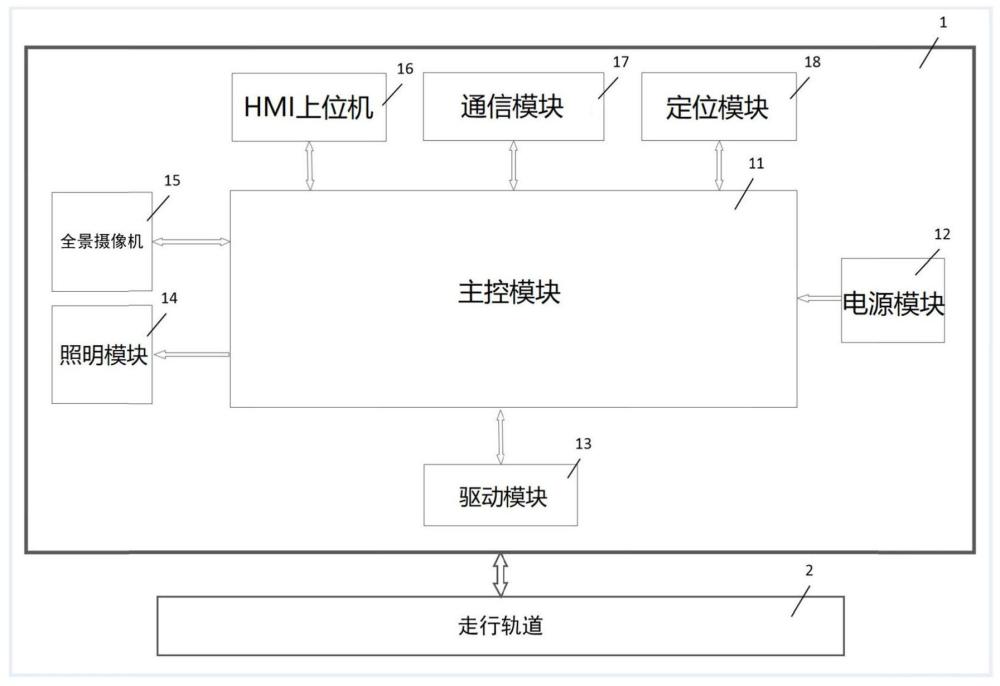
3、一种高架梁腹自动化巡检设备,包括巡检小车、主控模块、通信模块、定位模块、电源模块、驱动模块以及全景摄像机,所述全景摄像机设置于巡检小车的前端并与主控模块电连接,用于采集高架梁腹的图像信息,并将图像信息传输给主控模块;所述驱动模块与所述主控模块电连接,用于根据主控模块的控制信号驱动或停止巡检小车;所述定位模块与所述主控模块电连接,用于实时获取巡检小车位置信息,并将位置信息传输给主控模块;所述电源模块与所述主控模块电连接,用于为巡检小车提供工作电压;所述通信模块与所述主控模块连接,用于巡检小车与控制终端的无线通信,通信模块收发主控模块传递的图像信息和位置信息,同时向主控模块输入控制终端发出的控制信号。
4、作为上述方案的改进,所述高架梁腹自动化巡检设备还包括hmi上位机,所述hmi上位机与所述主控模块电连接,用于本地数据参数的设置和显示。
5、作为上述方案的改进,所述高架梁腹自动化巡检设备还包括照明模块,所述照明模块设置于巡检小车外部并与所述主控模块连接,用于根据主控模块的控制信号对巡检小车的巡检环境进行照明。
6、作为上述方案的改进,所述照明模块包括led泛光灯,所述led泛光灯设置于巡检小车前端的两侧和顶端。
7、作为上述方案的改进,所述照明模块还包括固定支架,所述固定支架安装在巡检小车外部并与所述led泛光灯连接。
8、作为上述方案的改进,高架梁腹自动化巡检设备还包括与巡检小车对应设置的走行轨道,用于供巡检小车在梁腹区域平稳行驶。
9、作为上述方案的改进,所述走行轨道包括若干圆管、若干连接板,并行的两圆管通过至少两个连接板固定并实现平行。
10、作为上述方案的改进,所述走行轨道还包括若干公插套,所述公插套套设在所述圆管的端部。
11、与现有技术相比,本实用新型具有以下有益效果:
12、本申请通过巡检小车定速行驶,由全景摄像机对梁腹内部自动拍摄,人工后期可读取数据检查梁腹状态,替代人工巡检,实现巡检作业的自动化,全过程数据追溯,大幅提升巡检效率,同时有效减轻巡检人员劳动强度及身心伤害。
技术特征:1.一种高架梁腹自动化巡检设备,其特征在于,包括巡检小车、主控模块、通信模块、定位模块、电源模块、驱动模块以及全景摄像机,所述全景摄像机设置于巡检小车的前端并与主控模块电连接,用于采集高架梁腹的图像信息,并将图像信息传输给主控模块;所述驱动模块与所述主控模块电连接,用于根据主控模块的控制信号驱动或停止巡检小车;所述定位模块与所述主控模块电连接,用于实时获取巡检小车位置信息,并将位置信息传输给主控模块;所述电源模块与所述主控模块电连接,用于为巡检小车提供工作电压;所述通信模块与所述主控模块连接,用于巡检小车与控制终端的无线通信,通信模块收发主控模块传递的图像信息和位置信息,同时向主控模块输入控制终端发出的控制信号。
2.根据权利要求1所述的高架梁腹自动化巡检设备,其特征在于,还包括hmi上位机,所述hmi上位机与所述主控模块电连接,用于本地数据参数的设置和显示。
3.根据权利要求1所述的高架梁腹自动化巡检设备,其特征在于,还包括照明模块,所述照明模块设置于巡检小车外部并与所述主控模块连接,用于根据主控模块的控制信号对巡检小车的巡检环境进行照明。
4.根据权利要求3所述的高架梁腹自动化巡检设备,其特征在于,所述照明模块包括led泛光灯,所述led泛光灯设置于巡检小车前端的两侧和顶端。
5.根据权利要求4所述的高架梁腹自动化巡检设备,其特征在于,所述照明模块还包括固定支架,所述固定支架安装在巡检小车外部并与所述led泛光灯连接。
6.根据权利要求1-5任一项所述的高架梁腹自动化巡检设备,其特征在于,还包括与巡检小车对应设置的走行轨道,用于供巡检小车在梁腹区域平稳行驶。
7.根据权利要求6所述的高架梁腹自动化巡检设备,其特征在于,所述走行轨道包括若干圆管、若干连接板,并行的两圆管通过至少两个连接板固定并实现平行。
8.根据权利要求6所述的高架梁腹自动化巡检设备,其特征在于,所述走行轨道还包括若干公插套,所述公插套套设在所述圆管的端部。
技术总结本技术提供了一种高架梁腹自动化巡检设备,包括巡检小车、主控模块、通信模块、定位模块、电源模块、驱动模块以及全景摄像机,全景摄像机位于巡检小车的前端,用于采集高架梁腹的图像信息,并将其传输给主控模块,驱动模块根据主控模块的指令来控制巡检小车的运动。通过各模块协同工作,使设备能够自动巡检高架梁腹并将数据传输到控制终端,解决了城市轨道交通中,高架桥梁腹人工巡检作业模式的高劳动强度、高安全风险及低作业效率等突出瓶颈问题,为梁腹巡检提供了更加便捷化、自动化、智能化、数字化的解决方案。技术研发人员:刘宝林,邓东强,陈智华,王冬华,李天明,陈坤,杨金石,崔佐铭,邓水超受保护的技术使用者:广州地铁集团有限公司技术研发日:20231130技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240718/235064.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表