一种悬挂式磁浮轨道厢梁道岔监测系统及方法与流程
- 国知局
- 2024-08-02 16:19:42
本公开属于轨道交通领域,特别涉及一种悬挂式磁浮轨道厢梁道岔监测系统及方法。
背景技术:
1、磁悬浮导轨是一种基于磁浮原理进行悬浮的轨道交通系统,其特点是能够实现高速、平稳、低噪音的运行。在磁悬浮导轨系统中,通过线圈产生的电磁场和车厢上的永磁体间的相互作用,使车厢悬浮在导轨上,而导轨上的线圈则产生控制磁场,以控制车厢的运动。磁浮悬挂式轨道交通走行方式独特,即车厢悬挂在轨道梁下方行驶,不同于普通的轮对式轨道系统,它是采用钢梁作为车辆行走轨道,钢梁悬挂于钢柱上,并承受列车的荷载。
2、回转道岔由直线道岔梁和曲线道岔梁组合而成(图1所示),通过旋转移动两根道岔梁的位置,实现道岔梁与线路轨道梁对接后通行。道岔曲线线型使用了直线-圆弧-直线的方式,两段直线分别与圆弧相切。当直线道岔梁与两直线线路轨道梁对接时,道岔转辙位置位于d位,当曲线道岔梁与两直线线路轨道梁对接时,道岔转辙位置位于f位。
3、悬挂式回转道岔是悬挂式空轨交通线路中使用的一种特殊轨道转辙设备。回转式道岔的梁体由一根直线梁和一根曲线梁组成,由走形车轮整体悬挂于横梁上(图2所示),采用电力驱动,转辙时两根道岔梁整体转动,其中任意一根梁和接口轨道梁对接形成岔道,转换列车行驶路线,从而完成车辆行驶线路的转线需要。道岔锁紧时,道岔相当于轨道梁,列车从其下方通过。当列车需要转线时,道岔梁在驱动及走行装置的驱动下,整体发生回转(电机转动带动下方的道岔梁做弧形移动,也可以称为水平平移),道岔两端旋转相同的角度,从而形成道岔梁前后两端与相邻的轨道梁对接,完成转辙。
4、转辙工作原理:悬挂式回转道岔转辙采用齿轮齿条传动机构;驱动系统采用减速电机驱动。通过电机转动使其电机齿轮在预定的齿条旋转移动,从而带动道岔整体移动,实现道岔厢梁的切换,完成道岔的转辙。
5、现有的磁浮悬挂式回转道岔缺少监测系统,无法对磁浮悬挂式回转道岔实时位置监测,并精确判断道岔锁止位置精度。而在在运行过程中,车厢的定位是通过磁悬浮导轨系统实现的,因此道岔的定位精度很大程度上影响了整个系统的稳定性和安全性。
6、因此,现提出一种悬挂式磁浮轨道厢梁道岔监测系统及方法,在道岔厢梁转换时实时监测回转道岔的位置并精确判断道岔锁止位置精度,且能测量道岔厢梁相对固定厢梁在转换中的移动速度。
技术实现思路
1、鉴于上述问题,本公开提出了一种悬挂式磁浮轨道厢梁道岔监测系统及方法,该方法将激光对射技术应用于移动厢梁进行相对定位,可以实时监测道岔的实时位置、道岔移动速度。
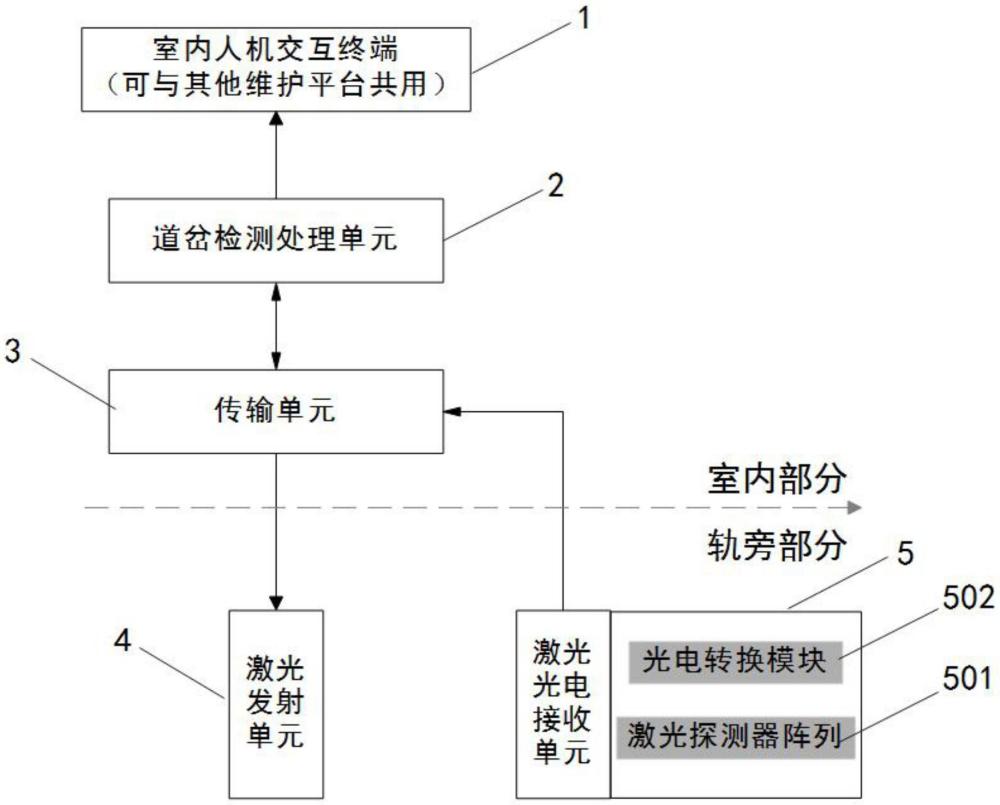
2、一种悬挂式磁浮轨道厢梁道岔监测系统,包括激光光电接收单元、激光发射单元、道岔监测处理单元;所述激光光电接收单元、激光发射单元,其一安装在固定厢梁,另一安装在道岔活动厢梁上;所述激光光电接收单元包括激光探测器阵列、光电转换模块,以使得激光光电接收单元可接收激光发射单元发射的激光并转换为电信号;所述道岔监测处理单元与激光光电接收单元电气连接,以用于接收激光光电接收单元传输的电信号。
3、激光光电接收单元用于接收激光信号并确定激光发射单元位置,道岔监测处理单元将确定的位置信息转换成道岔的位置及相应的表示信息,也可用于监测过车时到道岔厢梁冲击振动。
4、在本方案的一种优选实施例中,所述的激光光电接收单元、激光发射单元通过传输单元与道岔监测处理单元电气连接,道岔监测处理单元与室内人机交互终端电气连接。室内人机交互终端可与其他维护平台共用。
5、在本方案的一种优选实施例中,所述的激光发射单元安装在固定厢梁上,激光探测器阵列包括安装在道岔活动厢梁上的多个探测器,所述道岔活动厢梁包括直线梁、曲线梁。当激光照射到激光探测器表面后,会生成电流,电流大小正比于输入的光功率。
6、在本方案的一种优选实施例中,所述的激光发射单元的激光发射端安装在固定厢梁内测顶部中心位置处,多个探测器均匀部署在直线梁和曲线梁靠近固定厢梁中心线的半侧,并确保道岔转到位后接收端能够正常接收发射端电信号。
7、在本方案的一种优选实施例中,在道岔活动厢梁转辙过程中,探测器的激光接收端与激光发射端的接收距离根据厢梁结构定义,优选的推荐值为200mm。激光测距的原理是光线的直线传播,测量距离过大会导致光斑较大,因此,本公开中,优选激光接收端与激光发射端的接收距离为200mm,有利于接收端光斑较小。
8、本公开可选择在直线梁的整个接收面,以及曲线梁的整个接收面全布设光电探测器;而本公开优选在直线梁的右半边和曲线梁的左半侧部署探测器的原因是:直线梁的右半边和曲线梁的左半侧为道岔厢梁转换的有效监测范围,探测器仅在有效监测范围内部署,可减少探测器的布置数量,有利于降低成本。
9、在本方案的一种优选实施例中,所述的激光探测器阵列包括安装在直线梁上的多个探测器,和安装在曲线梁上的多个探测器;所述直线梁和曲线梁上安装的探测器阵列布置间距根据检测精度需求灵活选取,优选的推荐值为50mm。本公开探测器间间隔均匀布置,在测得激光光源经过相邻两个或多个探测器的时间后,可计算道岔厢梁的移动速度,确定道岔平移转动的平顺性。
10、在本方案的一种优选实施例中,所述的激光发射单元包括对应安装在道岔活动厢梁上的两个激光发射端,激光探测器阵列包括安装在固定厢梁上的多个探测器;所述道岔活动厢梁包括直线梁、曲线梁,两个激光发射端分别安装在直线梁、曲线梁上。本公开中,两个激光发射端设有不同的光源发射频率,以用于区分直线梁、曲线梁。
11、在本方案的一种优选实施例中,所述的两个激光发射端载频相应确保接收端可区分识别。
12、在本方案的一种优选实施例中,所述的两个激光发射端其一的光源发射频率为f1=100khz,另一为f2=255khz。
13、在本方案的一种优选实施例中,所述的探测器的可以是圆形光电探测器。
14、在本方案的一种优选实施例中,所述的激光探测器阵列中的相邻探测器均设置有黑色材质的格挡。设置黑色格挡能有利于避免光反射、散射。
15、基于同一发明构思,本公开还提供了一种悬挂式磁浮轨道厢梁道岔监测方法,所述监测方法包括以下步骤:
16、s1、对探测器进行标号,并对不同的探测器进行id编号,将探测器的id与道岔位置关系建立相应的表;
17、s2、轨道厢梁道转辙时,探测器接收激光发射单元发出的光信号并转变为电信号,电信号经传输单元的运放放大电路处理,转换为电压信号,通过ad进行采集,电压信传输至道岔监测处理单元;
18、s3、道岔监测处理单元包括cpu模块,cpu模块将采集电压信号进行光强信号的比较,筛选电压信号满足门限要求信号确定探测器id,并根据采集探测器的id转变为道岔的位置。
19、在本方案的一种优选实施例中,还包括步骤s4:根据激光光源经过相邻两个或多个探测器的时间,计算道岔厢梁的移动速度。
20、激光测速是对被测物体进行两次有特定时间间隔的激光测距,取得在该时段内被测物体的移动距离,从而得到该被测物体的移动速度;本公开中,直线梁、曲线梁上的探测器间距已知,得到激光光源经过相邻两个或多个探测器的时间,即可计算道岔厢梁的移动速度。
21、在本方案的一种优选实施例中,当激光发射单元安装在固定厢梁上,步骤s2中的激光发射单元为常亮。
22、在本方案的一种优选实施例中,当激光发射单元安装在安装在直线梁、曲线梁上时,两个激光发射端发射不同载频驱动。
23、本公开的有益效果:
24、本方案一种悬挂式磁浮轨道厢梁道岔监测系统,包括激光光电接收单元,激光发射单元,道岔监测处理单元,以及传输单元和室内人机交互终端;通过在道岔梁和固定梁安装激光光电接收单元与激光发射单元,来监测悬挂式轨道厢梁道岔实时位置,并能精确判断道岔锁止位置精度;本公开激光光电接收阵列单元的设计,还能用于检测道岔在转换过程中道岔平移转动的平顺性,给予道岔机电维护的参考数据,且本公开根据激光光源经过相邻两个或多个探测器的时间,能计算道岔厢梁的移动速度;
25、此外,激光发射单元以预设的频率向外发射激光,激光光电接收单元由多个激光探测器阵列和光电转换模块构成,用于接收激光信号并确定激光发射单元位置,道岔监测处理单元将确定的位置信息转换成道岔的位置及相应的表示信息,可用于监测过车时到道岔厢梁冲击振动。
26、本公开的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本公开而了解。本公开的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240718/250265.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表