融合在线地图不确定性的自动驾驶碰撞风险的预测方法
- 国知局
- 2024-08-02 16:32:49
本发明属于交通控制领域,涉及自动驾驶车辆碰撞风险的预测,具体地,涉及一种融合在线地图不确定性的自动驾驶碰撞风险的预测方法。
背景技术:
1、风险预测是自动驾驶堆栈的一个重要组成部分,它影响自动驾驶车辆下游的规划与控制模块,一种好的风险预测方法可以为人机共驾下的接管系统提供有效、准确的安全评估信号。
2、现有的风险预测大多基于高精地图所提供的数据,但是高精地图的标注和维护成本高昂,只能在特定的区域内使用,拓展性较差,部分学者将工作转向传感器数据在线估算高精度地图,但是这些在线估计的方法并没有考虑到估算的在线地图具有不确定性。因此,需要设计一种新的风险预测方法,用于产生在线地图的不确定性并将产生的不确定性融入到风险预测中,以提高风险预测的精度,为人机共驾下的自动驾驶接管系统的预警的研究提供有价值的参考。
技术实现思路
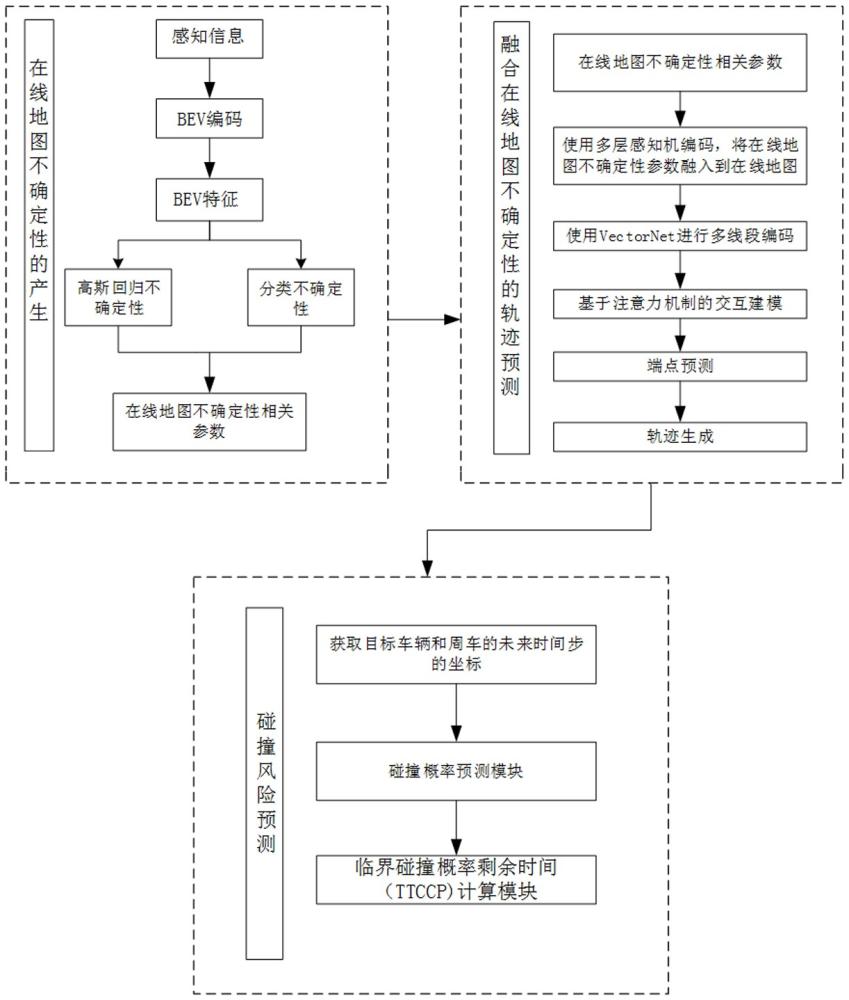
1、鉴于上述技术问题和缺陷,本发明的目的在于提供一种融合在线地图不确定性的自动驾驶碰撞风险的预测方法,该方法基于车载摄像头、雷达收集的在线数据产生在线地图和在线地图的不确定性参数,并将其融合到下游的轨迹预测模块进行特征提取、端点预测和轨迹生成,之后碰撞风险预测模块根据轨迹预测输出目标车辆和周车的轨迹点,输出未来时间步内发生碰撞的概率,同时计算碰撞概率剩余时间,该方法考虑了在线地图的不确定性,显著提高了下游风险预测模块的准确性,为人机共驾下自动驾驶车辆的接管系统提供了有效、准确的安全评估信号。
2、为实现上述目的,本发明采用如下技术方案:
3、一种融合在线地图不确定性的自动驾驶碰撞风险的预测方法,该方法包括以下步骤:
4、步骤1:在线地图不确定性的产生;
5、步骤1.1:收集车载摄像头、雷达获取到的周围道路和代理的信息,并进行相应的降噪处理;
6、步骤1.2:将经过降噪处理的数据输入到bev编码器中,将获取的数据转换为一个共同的bev空间特征;
7、步骤1.3:建立高斯回归不确定性模型和分类不确定性模型,将bev空间特征作为输入,使用在线地图回归模型生成地图元素顶点,所述地图元素顶点包括元素顶点的位置和类型,通过高斯回归不确定性模型和分类不确定性模型计算在线地图不确定性相关参数;其中,高斯回归不确定性模型计算每个地图元素顶点的预测位置和位置的相关的不确定性的参数,分类不确定性模型计算每个地图元素顶点的类型的置信度;
8、步骤2:融合在线地图不确定性的轨迹预测;
9、步骤2.1:使用多层感知机编码,将获得的地图元素顶点的预测位置和位置的相关的不确定性的参数及地图元素顶点的类型的置信度融合到在线地图中;
10、步骤2.2:对于融合了不确定性参数的在线地图,使用vectornet进行多线段编码,并进行特征提取,在编码车道线特征时,使用vectornet为每个场景元素编码一个多段线子图,对代理和车道使用两个独立的子图,通过编码获得特征向量;
11、步骤2.3:将获得的特征向量传入到由代理到车道模块,车道到车道模块,车道到代理模块和代理到代理模块堆叠组成的交互建模模块中来更新特征,更新后的特征为;其中,所述代理到车道模块关注的是代理和车道之间的关系,所述车道到车道模块关注的是车道和车道之间的关系,所述车道到代理模块关注的是车道和代理之间的关系,所述代理到代理模块关注的是代理和代理之间的关系,代理到车道模块、车道到车道模块、车道到代理模块、代理到代理模块均为多头注意力块;
12、步骤2.4:基于元信息f和特征拼接后的特征向量,使用定点预测器和环境自适应预测器来预测目标车辆和周围代理轨迹的端点,并使用多层感知机mlp来生成轨迹;
13、步骤3:基于预测轨迹的碰撞风险预测;
14、步骤3.1:根据步骤2.4生成的轨迹获取目标车辆与周围代理的未来时间步的坐标,将预测的目标车辆和周围代理的未来时间步的坐标输入到碰撞概率预测模块,预测周围代理在未来总的时间步内发生碰撞的概率;
15、步骤3.2:将步骤3.1得到的碰撞概率输入到临界碰撞概率剩余时间计算模块中,计算临界碰撞概率剩余时间,并将其传输给人机共驾系统。
16、作为本发明的优选,步骤1.1中,周围道路信息包括:道路的类型、限速、是否处于交叉路口、红绿灯、道路的坡度;其中,道路的类型包括交叉路口、左转车道、右转车道、直行车道;周围代理信息包括:代理的类型、速度、加速度,代理的类型包括行人、车辆。
17、作为本发明的优选,步骤1.3中,建立的高斯回归不确定性模型表示为:
18、;
19、式中,v为地图元素m顶点的个数,第 i个顶点的坐标是,是均值,表示顶点位置的预期值,是标准差,衡量预测位置的不确定性,是方差; i和 j用于表示地图元素m的第 i个顶点的第 j个维度,为高斯回归不确定性模型的输出;
20、所述分类不确定性模型使用多层感知机mlp输出每个地图元素顶点的类型的置信度。
21、作为本发明的优选,步骤2.1中,将地图元素顶点的预测位置和位置的相关的不确定性的参数及地图元素顶点的类型的置信度融合到在线地图中的模型为:
22、
23、 式中,是第i个顶点的高斯分布均值向量,是高斯回归不确定性模型输出的第i个顶点的不确定性的标准差向量,是第i个顶点的置信度组成的类别概率向量,[ ;; ]表示三个向量的连接,为多层感知机mlp。
24、作为本发明的优选,步骤2.3中,交互建模模块使用自注意力编码器后跟前馈网络(ffn)来更新代理到代理模块、车道到车道模块,使用交叉注意力编码器后跟前馈网络来更新车道到代理模块、代理到车道模块,每个编码器都是用多头注意力机制(mha):
25、;
26、 = k = v = ;
27、;
28、式中,、、是学习到的投影,norm正则化;q、k、v分别是注意力机制的查询向量、键向量、值向量,激活函数,均为特征向量;
29、多头注意力块定义如下:
30、;
31、将代理到车道模块、车道到车道模块、车道到代理模块、代理到代理模块进行堆叠,以更新特征,获得更新后的特征。
32、作为本发明的优选,步骤2.4中,元信息f和特征拼接的模型为:
33、 = (,f);
34、式中,为多层感知机mlp,为元信息和特征拼接后的向量,元信息f包括预测时刻代理的方向和位置信息。
35、作为本发明的优选,步骤2.4中,定点预测器用于预测目标代理的端点,定点预测器借助一个多层感知机实现对端点进行预测,公式如下:
36、 = ();
37、式中,为预测的端点,多层感知机mlp,为元信息f和特征拼接后的特征向量。
38、作为本发明的优选,步骤2.4中,环境自适应预测器用于预测周围多个代理的端点,环境自适应预测器采用动态权重学习的方式适应每个代理的具体情况:
39、;
40、;
41、;
42、;
43、式中,、为可训练的参数,、是端点预测模块中的权重动态调节矩阵,norm为层归一化,relu为激活函数;是经过动态权重矩阵和特征正则化处理和非线性拟合后的矩阵,为预测的端点。
44、作为本发明的优选,步骤3.1中,碰撞概率预测模块建立了碰撞相交函数、目标车辆与周围代理在预测时间步的时间范围内的碰撞概率预测函数;其中,碰撞相交函数用于判断目标车辆与周车的矩阵在未来预测的每一个时间步是否有重叠的部分,如果有输出1,如果没有输出0;
45、碰撞相交函数为:
46、;
47、式中,为预测未来轨迹的时间范围,为目标车辆,为周围代理,为目标车辆的矩阵,为周围代理的矩阵;
48、目标车辆与周围代理在预测时间步的时间范围内的碰撞概率预测函数为:
49、;
50、式中,为目标车辆与周围代理发生碰撞的事件,= ;为目标车辆与周围代理在预测时间步发生碰撞的概率积分;是指目标车辆和周围代理在时间[]内通过交互性预测得来的分布概率;
51、设周围代理为n辆,定义目标车辆在t范围内至少与一辆周围代理发生一次碰撞为(),在未来总的时间步内发生碰撞的概率p(())的计算公式为:
52、;
53、式中,p(())计算了从s到n辆周车在总的时间步的碰撞概率。
54、作为本发明的优选,步骤3.2中,临界碰撞概率剩余时间计算模块的计算公式为:
55、;
56、式中,指在所有可能的预测时间步中,找到最小的一个,使得在时间的时刻,碰撞概率超过临界值ccp。
57、本发明的优点和有益效果:
58、(1)本发明提供的方法使用在线地图作为碰撞风险预测模型的输入,避免了使用高精地图高昂的维护成本,同时提高了碰撞风险预测模型的可扩展性。
59、(2)本发明建立了在线地图不确定性的生成模型,将在线地图的不确定性融入到下游的预测任务中,有效的提高了碰撞风险预测的精度。
60、(3)本发明车辆轨迹预测模块中端点预测使用的是定点预测器和环境自适应预测器,环境自适应预测器在预测多个代理的端点时,能根据每个代理所处的环境进行动态权重的学习,能有效的避免计算资源的浪费,提高风险预测模块的响应速度。
61、(4)本发明采用深度学习的前沿技术与传统的风险预测结合的方法,充分的考虑了在风险预测模块上游模块中遇到的问题,并提出了相应的改进方案,为人机共驾接管系统中风险的预警系统的建立提供了一种新的思路和视角。
62、(5)本发明提供的方法中ttccp 提供了一个具体的时间值,表明系统预计在多久之后,车辆将面临一个潜在碰撞的风险值达到或超过了系统定义的临界水平;这个值可以用于激活安全预警,为人机共驾下自动驾驶车辆的接管系统提供了有效、准确的安全评估信号。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251218.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。