基于融合信息的自动泊车方法与流程
- 国知局
- 2024-08-02 16:51:34
本发明属于汽车自动驾驶,尤其是涉及一种基于融合信息的自动泊车方法。
背景技术:
1、随着全球汽车产销量的稳步增长,自动泊车系统(aps)作为高级驾驶辅助系统的重要组成部分,受到了广泛的关注和研究。当前,自动泊车技术面临的主要挑战包括泊车位的精确识别和车位类型的判定,系统的核心在于通过多传感器信息融合来实现对泊车环境的精确感知,虽然采用超声波雷达和摄像头组合的传感器方案能够有效识别常见车位并支持泊车操作,但在处理复杂场景时仍存在准确性不足和泊车时间过长的问题。
技术实现思路
1、有鉴于此,本发明旨在提出基于融合信息的自动泊车方法,以大幅提高了自动泊车的准确性和效率。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、基于融合信息的自动泊车方法,
4、进一步的,包括以下步骤:
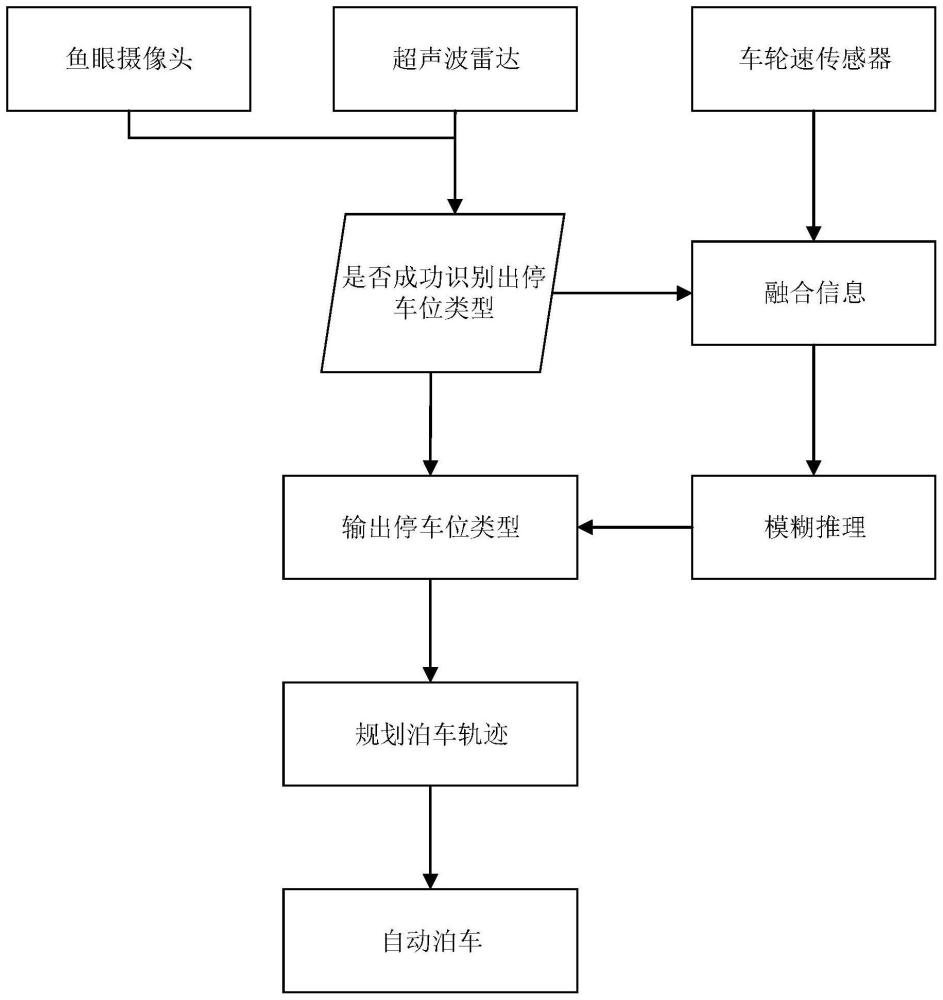
5、t1、探测停车环境:汽车利用车辆四周的鱼眼摄像头和超声波雷达获取周围的环境信息;
6、t2、停车位识别:结合鱼眼摄像头信息、超声波雷达信息、车轮速传感器信息识别出停车位类型;
7、t3、规划泊车轨迹:根据停车位类型和鱼眼摄像头信息、超声波雷达信息、车轮速传感器信息,利用快速探索随机树生成当前汽车位置到停车位的初始泊车轨迹,并通过路径平滑技术修正泊车轨迹;
8、t4、泊车:按照t3中生成的泊车轨迹控制汽车泊车,泊车期间利用mpc实施路径跟踪,并根据传感器的实时反馈微调泊车轨迹直到泊车完成。
9、进一步的,所述t2包括以下分步骤:
10、t21、鱼眼摄像头摄取汽车周围的环境图像并预处理环境图像,再识别出环境图像中停车位边线,利用超声波雷达探测出汽车周围的障碍物距离,并计算出停车位的空间大小和位置信息;
11、t22、若鱼眼摄像头或超声波雷达其中之一能成功识别停车位类型,使用对应数据作为停车位信息并转到t24,若都未能成功识别停车位则转到t23;
12、t23、利用车轮速度传感器数据分析停车位两旁汽车的姿态,融合鱼眼摄像头、超声波雷达、车轮速度传感器的信息得出停车位两旁汽车的姿态特征参数,通过模糊推理算法推测出停车位类型;
13、t24、输出停车位类别及位置信息。
14、进一步的,所述t22中,若鱼眼摄像头和超声波雷达都成功识别出停车位类型,则采用鱼眼摄像头的识别结果作为停车位类型,停车位类别包括斜向泊车位、平行泊车位、垂直泊车位。
15、进一步的,所述t22中,环境图像预处理过程包括依次经过灰度化、二值化、边缘检测、特征提取,最终得出停车位信息。
16、进一步的,在所述t23中,停车位两旁汽车的姿态特征参数包括姿态角θ:
17、
18、式中,姿态角θ为汽车纵向与汽车行进方向之间的夹角,xa、xb分别是位于汽车一侧面两角处a、b点的车轮速度传感器探测到的行进距离,ya、yb分别是位于汽车一侧面两角处a、b点的超声波雷达探测到的距离值,judge=0表示通过鱼眼摄像头识别到a、b点之间的侧面为汽车横向侧面,judge=1表示通过鱼眼摄像头识别到a、b点之间的侧面为汽车纵向侧面。
19、进一步的,把停车位两旁汽车的姿态角θ以及超声波雷达、车轮速度传感器的信息作为输入,采用mamdani型模糊推理算法对输入模糊化,再根据驾驶员停车经验推测出停车位类型。
20、进一步的,所述t3中包括以下分步骤:
21、t31、环境和参数设置:根据鱼眼摄像头和超声波雷达数据建立环境模型,包括汽车当前位置、停车位、周边障碍。
22、t32、应用rrt算法进行路径搜索:使用快速探索随机树算法从当前位置到停车位搜索一条路径。
23、t33、轨迹平滑处理:通过贝塞尔曲线路径平滑技术对路径进行平滑处理,以优化驾驶舒适度和安全性,输出最终泊车轨迹。
24、进一步的,一种电子设备,包括处理器以及与处理器通信连接,且用于存储所述处理器可执行指令的存储器,所述处理器用于执行所述的基于融合信息的自动泊车方法。
25、进一步的,一种服务器,包括至少一个处理器,以及与所述处理器通信连接的存储器,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述处理器执行,以使所述至少一个处理器执行所述的基于融合信息的自动泊车方法。
26、进一步的,一种计算机可读取存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现所述的基于融合信息的自动泊车方法。
27、相对于现有技术,本发明所述的基于融合信息的自动泊车方法具有以下
28、有益效果:
29、通过融合摄像头、超声波雷达和车轮速度传感器的数据,车辆自动泊车系统能够精确地识别和分析停车环境,从而优化泊车轨迹规划和执行,提高了环境感知的准确性和响应速度,使得自动泊车过程更加安全、高效,同时减少人为错误和泊车时间,显著提升了驾驶体验和停车便利性。
技术特征:1.基于融合信息的自动泊车方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于融合信息的自动泊车方法,其特征在于:所述t2包括以下分步骤:
3.根据权利要求2所述的基于融合信息的自动泊车方法,其特征在于:所述t22中,若鱼眼摄像头和超声波雷达都成功识别出停车位类型,则采用鱼眼摄像头的识别结果作为停车位类型,停车位类别包括斜向泊车位、平行泊车位、垂直泊车位。
4.根据权利要求2所述的基于融合信息的自动泊车方法,其特征在于:所述t22中,环境图像预处理过程包括依次经过灰度化、二值化、边缘检测、特征提取,最终得出停车位信息。
5.根据权利要求2所述的基于融合信息的自动泊车方法,其特征在于:在所述t23中,停车位两旁汽车的姿态特征参数包括姿态角θ:
6.根据权利要求5所述的基于融合信息的自动泊车方法,其特征在于:把停车位两旁汽车的姿态角θ以及超声波雷达、车轮速度传感器的信息作为输入,采用mamdani型模糊推理算法对输入模糊化,再根据驾驶员停车经验推测出停车位类型。
7.根据权利要求1所述的基于融合信息的自动泊车方法,其特征在于:所述t3中包括以下分步骤:
8.一种电子设备,包括处理器以及与处理器通信连接,且用于存储所述处理器可执行指令的存储器,其特征在于:所述处理器用于执行上述权利要求1-7任一所述的基于融合信息的自动泊车方法。
9.一种服务器,其特征在于:包括至少一个处理器,以及与所述处理器通信连接的存储器,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述处理器执行,以使所述至少一个处理器执行如权利要求1-7任一所述的基于融合信息的自动泊车方法。
10.一种计算机可读取存储介质,存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现权利要求1-7任一项所述的基于融合信息的自动泊车方法。
技术总结本发明提供了基于融合信息的自动泊车方法,包括汽车利用车辆四周的鱼眼摄像头和超声波雷达获取周围的环境信息;结合鱼眼摄像头信息、超声波雷达信息、车轮速传感器信息识别出停车位类型;根据停车位类型和鱼眼摄像头信息、超声波雷达信息、车轮速传感器信息,利用快速探索随机树生成当前汽车位置到停车位的初始泊车轨迹,并通过路径平滑技术修正泊车轨迹;按照T3中生成的泊车轨迹控制汽车泊车,泊车期间利用MPC实施路径跟踪,并根据传感器的实时反馈微调泊车轨迹直到泊车完成。本发明有益效果:大幅提高了自动泊车的准确性和效率。技术研发人员:彭永胜,杜垚琼,湛国轩受保护的技术使用者:奥特贝睿(天津)科技有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/252780.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表