一种无人驾驶车辆的紧急制动系统的制作方法
- 国知局
- 2024-08-02 16:52:06
本技术涉及车辆制动,特别是涉及一种无人驾驶车辆的紧急制动系统。
背景技术:
1、无人驾驶汽车是一种通过电脑系统实现无人驾驶的智能汽车,依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
2、现有技术中,无人驾驶汽车的制动系统均为线控系统,如果制动的线控系统故障,会导致刹车失灵,无人驾驶汽车可能发生危险,为避免这种情况,需要在无人驾驶汽车内增加冗余的紧急制动系统,为此,我们提供一种无人驾驶车辆的紧急制动系统。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种无人驾驶车辆的紧急制动系统,以解决上述背景技术中提出的问题。
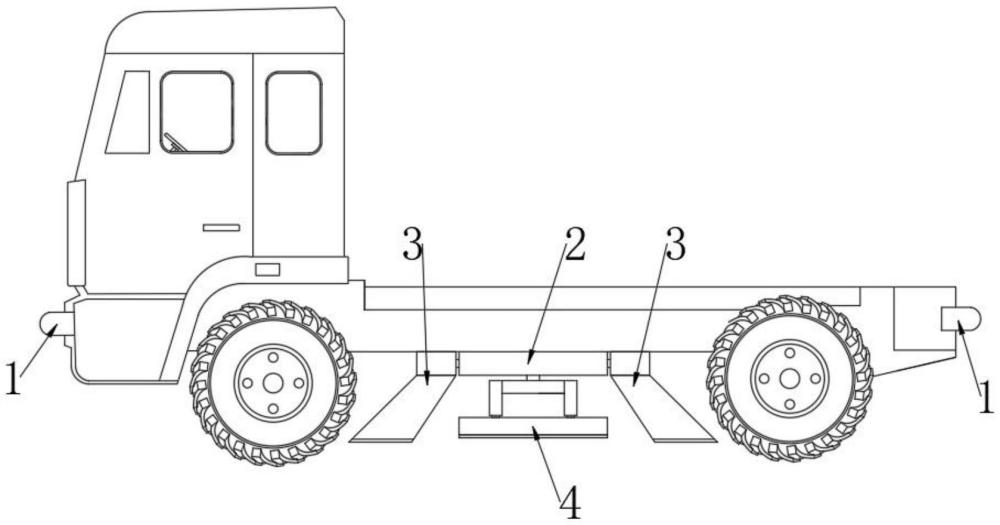
2、为解决上述技术问题,本实用新型提供如下技术方案:一种无人驾驶车辆的紧急制动系统,包括分别安装在无人驾驶车辆前后端的碰撞触发装置和车辆底板的制动盒,所述制动盒两端分别安装呈镜像分布的主制动装置,所述制动盒中设置有控制两主制动装置工作的制动器,两所述主制动装置分别控制车辆前后轮的制动,所述制动盒下端还设置有通过制动器控制的副制动板;
3、所述制动器电连接驱动控制器,所述驱动控制器与碰撞触发装置电连接。
4、作为本实用新型的一种优选技术方案,所述碰撞触发装置包括防撞梁和触发传感器,所述触发传感器电连接驱动控制器,所述制动器与驱动控制器电连接。
5、作为本实用新型的一种优选技术方案,所述主制动装置包括上端的移动板、下端的主制动板、安装于移动板中并控制主制动板上下移动的驱动器。
6、作为本实用新型的一种优选技术方案,所述制动器包括设置在制动盒中的横向气动缸和制动盒下端中部并与横向气动缸连通的倒u型气动缸,所述横向气动缸内两端及倒u型气动缸内两端分别设置有第一活塞、第二活塞,所述第一活塞另一端固接有滑动延伸至制动盒外端并与移动板一侧固接的横活塞杆,所述第二活塞下侧固接有滑动延伸至倒u型气动缸外端并与副制动板上侧固接的竖活塞杆,所述车辆底板上设置有控制横向气动缸中气压的增压泵,所述驱动控制器与增压泵电连接。
7、作为本实用新型的一种优选技术方案,所述倒u型气动缸内腔上侧对称安装有限位架,所述限位架下侧与倒u型气动缸内腔上端中部的下侧同一水平线,所述副制动板移动至上端时,所述第二活塞上侧与限位架下侧抵接。
8、作为本实用新型的一种优选技术方案,所述副制动板下侧和两主制动板的下侧分别固接有摩擦层。
9、与现有技术相比,本实用新型能达到的有益效果是:
10、当线控系统故障时或触发传感器接触到物品或人员时,驱动控制器控制制动器工作,制动器则控制两端的主制动装置及下端的副制动板移动,前后车轮分别压在主制动装置上,通过主制动装置与地面的摩擦达到无人驾驶车辆紧急制动和紧急避险的目的,由于两主制动装置位于前后轮之间位置,实现无人驾驶车辆前后移动的制动,极大提高了无人驾驶车辆的安全性,同时,副制动板与地面贴合,起到辅助制动的目的。
技术特征:1.一种无人驾驶车辆的紧急制动系统,其特征在于,包括分别安装在无人驾驶车辆前后端的碰撞触发装置(1)和车辆底板的制动盒(2),所述制动盒(2)两端分别安装呈镜像分布的主制动装置(3),所述制动盒(2)中设置有控制两主制动装置(3)工作的制动器,两所述主制动装置(3)分别控制车辆前后轮的制动,所述制动盒(2)下端还设置有通过制动器控制的副制动板(4);
2.根据权利要求1所述的一种无人驾驶车辆的紧急制动系统,其特征在于,所述碰撞触发装置(1)包括防撞梁和触发传感器,所述触发传感器电连接驱动控制器,所述制动器与驱动控制器电连接。
3.根据权利要求1所述的一种无人驾驶车辆的紧急制动系统,其特征在于,所述主制动装置(3)包括上端的移动板(32)、下端的主制动板(31)、安装于移动板(32)中并控制主制动板(31)上下移动的驱动器(33)。
4.根据权利要求3所述的一种无人驾驶车辆的紧急制动系统,其特征在于,所述制动器包括设置在制动盒(2)中的横向气动缸(7)和制动盒(2)下端中部并与横向气动缸(7)连通的倒u型气动缸(10),所述横向气动缸(7)内两端及倒u型气动缸(10)内两端分别设置有第一活塞(9)、第二活塞(12),所述第一活塞(9)另一端固接有滑动延伸至制动盒(2)外端并与移动板(32)一侧固接的横活塞杆(8),所述第二活塞(12)下侧固接有滑动延伸至倒u型气动缸(10)外端并与副制动板(4)上侧固接的竖活塞杆(11),所述车辆底板上设置有控制横向气动缸(7)中气压的增压泵(6),所述驱动控制器与增压泵(6)电连接。
5.根据权利要求4所述的一种无人驾驶车辆的紧急制动系统,其特征在于,所述倒u型气动缸(10)内腔上侧对称安装有限位架(5),所述限位架(5)下侧与倒u型气动缸(10)内腔上端中部的下侧同一水平线,所述副制动板(4)移动至上端时,所述第二活塞(12)上侧与限位架(5)下侧抵接。
6.根据权利要求3所述的一种无人驾驶车辆的紧急制动系统,其特征在于,所述副制动板(4)下侧和两主制动板(31)的下侧分别固接有摩擦层。
技术总结本技术公开了一种无人驾驶车辆的紧急制动系统,包括分别安装在无人驾驶车辆前后端的碰撞触发装置和车辆底板的制动盒,所述制动盒两端分别安装呈镜像分布的主制动装置,所述制动盒中设置有控制两主制动装置工作的制动器,两所述主制动装置分别控制车辆前后轮的制动,所述制动盒下端还设置有通过制动器控制的副制动板;所述制动器电连接驱动控制器,所述驱动控制器与碰撞触发装置电连接;本技术通过增加冗余的紧急制动系统,当线控系统故障时或触发传感器接触到物品或人员时,实现无人驾驶车辆紧急制动和紧急避险的目的,极大提高了无人驾驶车辆的安全性。技术研发人员:孙大海受保护的技术使用者:山东芯龙智能科技有限公司技术研发日:20231219技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/252841.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表