智能快速精准识别甘蔗病害并微波灭杀的飞艇无人机组合
- 国知局
- 2024-08-01 05:23:16
本发明属于甘蔗病虫害微波防治,具体涉及一种智能快速精准识别甘蔗病害并微波灭杀的飞艇无人机组合。
背景技术:
1、甘蔗是热带和亚热带作物,生长期长和种植周期长,生长环境复杂,加上长期连作,易积累大量的病源和虫源而导致病虫害的大发生。当前我国甘蔗发生病害有60多种,害虫360多种。其中甘蔗鞭黑穗病、凤梨病、梢腐病、宿根矮化病和花叶病发生较普遍,是广西蔗区的主要病害。黑穗病典型症状是在感病茎的梢头长出1条向下卷曲的黑色鞭状物,称为黑穗鞭,植株叶子也会随之变小,颜色逐渐变成淡绿色。锈病也是甘蔗种植过程中的常见病害之一,发生该疾病之后,甘蔗支柱的颜色会逐渐变化,叶子上会出现带有黄色晕环的斑点,随着病情加重,斑点会逐渐转化为脓包,并且颜色逐渐加深。甘蔗梢腐病主要危害甘蔗的梢部幼嫩叶片,引起梢部叶片扭曲、畸形,严重时整个梢部坏死,发病早期阶段幼嫩叶片由基部开始出现黄化褪绿,感病叶片扭曲变形,形成褶皱状,整张叶片不能完全伸展开来,叶片缩短。同时,甘蔗生长期叶部害虫分为棉蚜虫、蓟马虫、粘虫三种,它们活跃性最强并具有很高的危害性。
2、目前我国主要的防治病虫害的方法有:选育抗病品种、生物防治、化学药剂防治、轮作防治、物理机械防治。但在防治过程中容易出现过度依赖化学防治、选育抗病品种效率不高、生物防治技术不全面等诸多问题。
技术实现思路
1、针对上述不足,本发明公开了一种智能快速精准识别甘蔗病害并微波灭杀的飞艇无人机组合,通过无人机携带高清摄像头巡航甘蔗地,并且使用深度学习算法对获取的图像进行分析,识别出甘蔗梢部和叶部出现的病害种类后及时通过导航系统定位病害地点,并调用飞艇搭载微波设备对发现的病害进行灭杀。
2、本发明是采用如下技术方案实现的:
3、一种智能快速精准识别甘蔗病害并微波灭杀的飞艇无人机组合,其包括搭载有高清摄像头和定位导航系统的无人机、搭载有微波灭杀装置的飞艇和地面控制中心;
4、所述的无人机用于巡航甘蔗种植区域,通过高清摄像头收集甘蔗种植区域的图像信息并通过无线通信方式将收集的图像信息传送至地面控制中心;
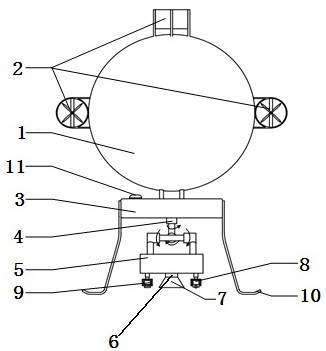
5、所述飞艇包括设有气囊的艇体,所述艇体的两侧和顶部分别设有一个双向风机,所述艇体的底部连接有舱体,所述舱体的底部设有云台,所述云台的底部连接有微波灭杀装置,所述微波灭杀装置内设有微波发生模块,所述微波发生模块连接有微波导管,所述微波导管从所述微波灭杀装置的底部伸出后连接微波馈口,所述微波馈口处设有微波防护罩;所述云台用于带动所述微波灭杀装置作360°转动,使得微波馈口始终保持与地面垂直;所述微波灭杀装置的底部设有超清摄像头,所述超清摄像头用于收集微波辐射处的图像信息并通过无线通信方式将收集的图像信息传送至地面控制中心;所述舱体的外侧设有3个或4个支撑架;所述微波灭杀装置的顶部设有飞行控制模块,所述飞行控制模块与双向风机连接,用于控制双向风机的启动和停止;所述舱体的内部设有电源模块,所述电源模块用于为所述的双向风机、微波发生模块、云台、超清摄像头和飞行控制模块供电;
6、所述地面控制中心包括数据收集模块、数据储存模块、深度学习模块、中心处理器、触控屏、数据输入模块、数据发送模块;所述数据收集模块与数据储存模块连接,所述数据收集模块通过无线通信方式接受来自无人机的高清摄像头的图像信息、飞艇的超清摄像头的图像信息或电源模块中的电量数据,并且将接受的图像信息传输至数据储存模块;所述数据输入模块与所述数据储存模块连接,所述数据输入模块用于工作人员将数据信息输入至数据储存模块中;所述触控屏与所述中心处理器连接,工作人员通过触控屏向中心处理器输入指令;所述中心处理器控制深度学习模块读取数据储存模块中的数据信息进行学习和分析;所述中心处理器控制数据发送模块向触控屏发送数据信息或者通过无线通信方式向飞行控制模块、云台、微波发生模块、无人机发送操作指令。
7、进一步的,所述微波灭杀装置的底部设有红外热成像测温仪,所述红外热成像测温仪用于对微波辐射处的温度进行检测,所述红外热成像测温仪通过无线通信方式将检测数据发送至所述地面控制中心的数据收集模块。
8、进一步的,所述微波灭杀装置的底部可拆卸安装有诱虫灯。
9、进一步的,所述云台内设有三个无刷电机和一个惯性测量单元,所述的惯性测量单元包括速度传感器、陀螺仪和磁力计。
10、进一步的,所述微波保护罩下端呈喇叭口形状,所述微波保护罩的外层为聚氨酯材料,里层为铁丝网。
11、进一步的,所述艇体的气囊包括主气囊和辅助气囊,所述主气囊内充有密度小于空气的气体(如氦气),所述辅助气囊通过气泵充入或排出空气。在辅助气囊内充入或排出空气,可以在几乎不改变总体积的情况下通过充入或排出空气改变飞艇自身的重量,从而实现飞艇的上升、悬浮和下降。
12、所述智能快速精准识别甘蔗病害并微波灭杀的飞艇无人机组合的使用方法,其包括以下步骤:
13、s1、工作人员操作地面控制中心,将收集的甘蔗病虫害的图像信息通过数据输入模块传输至数据储存模块中,接着中心处理器控制深度学习模块读取数据储存模块中的数据信息进行学习和分析;所述甘蔗病虫害的图像信息包括黑穗病、凤梨病、梢腐病、锈病、宿根矮化病、花叶病毒病、黄叶病毒病和线虫病的图像信息,并且也包括甘蔗螟虫、绵蚜、蓟马、粉蚧、蔗龟和蔗根锯天牛的图像信息;
14、s2、控制无人机定时进行甘蔗种植区域的巡航,无人机的高清摄像头实时采集甘蔗种植区域的图像信息并将其发送至数据收集模块,数据收集模块再将图像信息传输至数据储存模块中,所述中心处理器控制深度学习模块读取图像信息进行分析比对,识别甘蔗病害类型、受害面积和受害区域的地理坐标,然后中心处理器通过数据发送模块向飞艇的飞行控制模块发送飞行轨迹指令,控制飞艇对受害区域进行巡航,所述飞行控制模块通过控制艇体两侧双向电机实现飞艇的前进或后退,当艇体两侧双向电机的风向一致时前进或后退,风向不一致时实现飞艇的转向,通过控制艇体上方的双向风机实现飞艇的快速上升和下降;
15、当飞艇到达受害区域时,中心处理器向微波发生模块发送指令,使得微波发生模块产生微波对受害区域进行微波处理,所述微波处理的条件为微波频率为400mhz~3000mhz,微波功率为300w~20000w,微波处理温度为30℃~60℃;所述微波处理过程中,飞艇的速度控制在0.1m/min~60m/min;所述电源模块将实时电量数据发送至数据储存模块,当电量不足时,中心处理器向飞行控制模块发送返航指令;
16、s3、所述微波灭杀装置的超清摄像头实时采集受害区域的图像信息并将其发送至数据储存模块,所述中心处理器控制深度学习模块读取图像信息进行分析比对,确认受害区域微波处理完成后,中心处理器向飞行控制模块发送返航指令。
17、进一步的,所述无人机的巡航模式包括自动巡航检测模式和人工选择检测模式;所述自动巡航检测模式包括快速检测模式和全面检测模式;所述快速检测模式是将所需检测甘蔗地分为多块区域并排好检测顺序,对每一块区域拍摄一张照片,智能对照片中的病害和疑似病害的点进行标记,再进行路线规划前往标记点,对病害点进行微波灭杀和疑似点进行排查;所述人工选择检测模式是根据人为判断选择检测点或者区域及检测顺序,同时中心处理器控制深度学习模块预测需要检测的检测点供人工选择。
18、本技术方案与现有技术相比较具有以下有益效果:
19、1、本发明通过无人机携带高清摄像头巡航甘蔗地,通过深度学习算法对获取的图像进行分析,识别出甘蔗梢部和叶部出现的病害种类并通过导航系统定位病害地点,反馈给蔗农,同时可通过飞艇搭载的微波设备对发现的病害进行灭杀,其中无人机加飞艇的组合,相比于飞艇飞行速度慢,转向不便等问题,无人机能够快速的对甘蔗病害进行检测,再利用飞艇的高负载能力携带微波设备进行病害灭杀,弥补了无人机负载能力差的问题,不仅提高了作业效率,而且提高了作业续航能力。
20、2、本发明采用双向风机布置在飞艇顶部和两侧,通过两侧对称布置的风机控制飞艇的前进,后退,及风向相反时;飞行控制模块在接收地面控制信号后对飞艇的飞行轨迹、飞行姿态进行控制;设置云台能够保证微波模块的天线馈口方向始终保持垂直,天线馈口方向不会因为外界因素干扰如大风及飞艇飞行姿态改变等因素影响改变,保证微波灭杀精度及避免误伤,可实现边飞行边作业,提高作业效率,当突发情况,如天气恶劣或飞艇故障,导致微波天线馈口无法稳定竖直向下,自动停止微波作业,返航等候适宜天气或者检查飞艇;所述的微波防护罩作用为集中微波,提高灭杀效率,同时避免微波四散造成误伤;超清摄像头为地面控制中心实时提供作业情况,同时可在无人机无法工作时代替为无人机拍摄图片,为病害检测、分析、诊断提供素材;通过电源模块的数据信息,地面控制中心根据实时飞艇坐标规划返回路线和所需电量与剩余电量进行对比,当所需电量接近剩余电量时,停止作业,记录作业进度和标记坐标,并自动返航。
21、3、本发明使用微波灭杀虫害无毒,无残留,绿色环保,能够有效减少化学药品使用乃至不使用。
本文地址:https://www.jishuxx.com/zhuanli/20240722/219471.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表