一种无人机推力线调整方法与流程
- 国知局
- 2024-08-01 05:32:04
本申请属于与飞机相关联的地面装置,具体涉及一种无人机推力线调整方法。
背景技术:
1、火箭助推的发射方式是无人机最常用的发射起飞方式之一,但火箭助推的推力线控制与调整较为复杂。常规的推力线调整方法为:将无人机通过翻转工装翻转180°至机腹向上,安装吊挂测量筒,将无人机通过测量筒上的钢索吊起,通过测量钢索与测量筒内壁的距离,计算出z轴实际重心与z轴理论重心的偏差,然后换算为推力锥需调整的角度或位置。常规的推力线调整方法费时费力,测量误差较大;对于大型无人机,翼展与机身尺寸都比较大的情况下,翻转无人机非常困难,不仅需要设计专用的翻转工装,且需要工作人员在高处测量数据,安全性较低;初步调整时,需要将无人机放下,拆卸推力锥,再起吊检查调整结果,整个过程需要消耗大量的时间;常规的调整方法只有一种推力锥,在调节角度较大时,需要增加较多的垫片,垫片使用过多会造成发射时连接处压力不均,进而导致垫片变形、松动或者破裂,火箭发射时该处受力很大,一旦发生变形对无人机发射成功率和安全性都有影响。
技术实现思路
1、本申请实施例通过提供一种无人机推力线调整方法,解决了现有技术中的无人机通过翻转工装翻转后测量调整角度,存在费时费力和误差较大的问题。
2、为了实现上述目的,本发明实施例提供了一种无人机推力线调整方法,包括以下步骤:
3、通过配重将无人机x轴方向的实际重心调整至设定值x0,其中,x轴为机身的中轴线方向,y轴为两侧机翼的连线方向,z轴为垂直于x轴和y轴的方向;
4、将选定的推力锥安装于无人机的机腹,将测量筒的上端连接于推力锥的小口端,在测量筒内顶壁的中心悬挂吊绳,吊绳的下端伸出测量筒后连接于重锤,测量筒的轴线为理论推力线;
5、将起吊工装通过预设安装区域安装于无人机的机背,起吊工装与无人机的吊挂点位于理论推力线上;
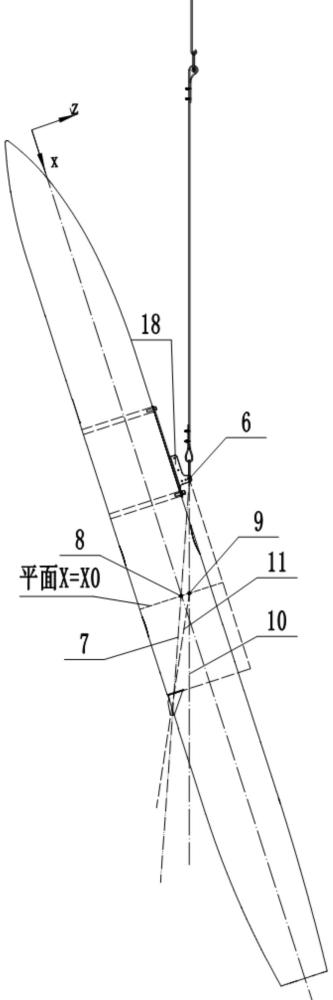
6、通过起吊工装将无人机吊起,无人机自然垂落不晃动时,在平面xoz平面内对z轴方向的实际推力线进行以下判断:
7、理论推力线和平面x=x0的交点为z轴理论重心;
8、经过吊挂点的地面法线和平面x=x0的交点为z轴实际重心,实际推力线经过z轴实际重心;
9、计算理论推力线和实际推力线的调整夹角,通过所述调整夹角调整推力锥在z轴方向的安装角度。
10、在一种可能的实现方式中,将选定的推力锥安装于无人机的机腹之前,还包括步骤:
11、将无人机x轴方向的实际重心调整至设定值x0后,确定无人机的z轴理论重心;
12、在多个备选推力锥中选取与所述z轴理论重心位置最接近的作为选定的推力锥。
13、在一种可能的实现方式中,在将起吊工装安装于无人机的机背之前,还包括步骤:
14、基于推力锥的安装位置、多个备选推力锥的角度及所述预设安装区域设计所述起吊工装,所述起吊工装设有多个吊孔,多个所述吊孔分别与多个所述备选推力锥一一对应。
15、在一种可能的实现方式中,通过测量筒外壁的倾角传感器测量地面法线与测量筒轴线的夹角,若夹角为零,则测量筒为竖直状态,z轴理论重心和z轴实际重心重合,即无需调整z向推力线;
16、若夹角不为零,则测量筒为倾斜状态,z轴理论重心和z轴实际重心不重合,然后计算理论推力线和实际推力线的调整夹角。
17、在一种可能的实现方式中,计算理论推力线和实际推力线的调整夹角包括步骤:
18、推力锥的安装角度值为θ,θ为理论推力线和x轴的夹角,测得地面法线与测量筒轴线的夹角值为α;
19、理论推力线和实际推力线相交于点b,吊挂点为点a,建立直角三角形abc,其中,线段ac垂直于平面x=x0,线段bc平行于平面x=x0;a点和b点与平面x=x0的距离均已知,则根据三角函数计算测量筒需要调节的角度值β,即得出推力锥在z轴方向需要调整的角度值β。
20、在一种可能的实现方式中,在平面xoy平面内对y轴方向实际推力线进行以下判断:
21、计算吊绳测量点在z1轴和y1轴上的调整坐标,其中,吊绳测量点为吊绳和测量筒端面的交点,吊绳上的z1轴和y1轴的原点位于测量筒端面的中心,y1轴平行于y轴,z1轴平行于z轴;
22、根据调整坐标和测量筒的内径计算吊绳测量点和z1轴的距离k;
23、根据距离k及吊绳测量点和吊绳吊点之间的距离,计算y轴方向实际推力线需要调整的角度,然后调整推力锥在y轴方向的安装角度。
24、在一种可能的实现方式中,吊绳测量点和吊绳吊点之间的距离、以及吊绳吊点和平面x=x0的距离相等,推力锥安装平面至平面x=x0的距离为p,则y轴方向实际推力线需要调整的角度e=arctan(k÷p)。
25、在一种可能的实现方式中,推力锥的锥座的周向均布有四个螺纹安装孔,四个螺纹安装孔位于一个虚拟矩形的四角处;
26、所述虚拟矩形的相邻两个边分别与无人机的y轴和z轴平行。
27、在一种可能的实现方式中,推力锥的锥面与火箭助推器的锥面一致,推力锥的小口端外壁均布有四个第一刻线;
28、测量筒的外壁设置有四个第二刻线,四个所述第二刻线与四个所述第一刻线分别对齐;
29、两个相对设置的第二刻线的连线分别平行于y轴和z轴。
30、在一种可能的实现方式中,起吊工装包括吊索、连接座和起吊设备,吊索的两端分别连接于起吊设备和连接座;
31、连接座包括对接座和铰接座,铰接座安装于对接座上,对接座与无人机机背的隔框连接;
32、铰接座上设置有多个吊孔,吊索通过与选定的推力锥所对应的吊孔安装形成所述吊挂点。
33、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
34、本发明实施例提供了一种无人机推力线调整方法,本发明通过正面起吊的方式来调整推力线,相对于常规的推力线调整方法,本发明无需采用翻转工装翻转无人机,因此测量和调整过程较为方便,效率高。本发明采用的起吊工装和测量筒成本低,便于操作,节省了一套无人机翻转工装,从而进一步节约了成本。测量筒从底部观测,工作人员不需要登高即可测量所需要的数据,保障了人员的安全性。本发明解决了现有技术中的无人机通过翻转工装翻转后测量调整角度,存在费时费力和误差较大的问题。
技术特征:1.一种无人机推力线调整方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人机推力线调整方法,其特征在于:将选定的推力锥(1)安装于无人机的机腹之前,还包括步骤:
3.根据权利要求2所述的无人机推力线调整方法,其特征在于:在将起吊工装(5)安装于无人机的机背之前,还包括步骤:
4.根据权利要求1所述的无人机推力线调整方法,其特征在于:通过测量筒(2)外壁的倾角传感器(12)测量地面法线(10)与测量筒(2)轴线的夹角,若夹角为零,则测量筒(2)为竖直状态,z轴理论重心(8)和z轴实际重心(9)重合,即无需调整z向推力线;
5.根据权利要求4所述的无人机推力线调整方法,其特征在于:计算理论推力线(7)和实际推力线(11)的调整夹角包括步骤:
6.根据权利要求1所述的无人机推力线调整方法,其特征在于,在平面xoy平面内对y轴方向实际推力线(11)进行以下判断:
7.根据权利要求6所述的无人机推力线调整方法,其特征在于:吊绳测量点和吊绳吊点(13)之间的距离、以及吊绳吊点(13)和平面x=x0的距离相等,推力锥(1)安装平面至平面x=x0的距离为p,则y轴方向实际推力线(11)需要调整的角度e=arctan(k÷p)。
8.根据权利要求1所述的无人机推力线调整方法,其特征在于:推力锥(1)的锥座的周向均布有四个螺纹安装孔(14),四个螺纹安装孔(14)位于一个虚拟矩形的四角处;
9.根据权利要求1所述的无人机推力线调整方法,其特征在于:推力锥(1)的锥面与火箭助推器的锥面一致,推力锥(1)的小口端外壁均布有四个第一刻线(15);
10.根据权利要求3所述的无人机推力线调整方法,其特征在于:起吊工装(5)包括吊索(17)、连接座(18)和起吊设备,吊索(17)的两端分别连接于起吊设备和连接座(18);
技术总结本申请公开了一种无人机推力线调整方法,包括步骤:将无人机X轴方向的实际重心调整至设定值X0;将推力锥安装,测量筒连接推力锥,在测量筒内顶壁的中心悬挂吊绳,吊绳的下端伸出测量筒后连接于重锤,测量筒的轴线为理论推力线;将起吊工装安装于无人机的机背,无人机的吊挂点位于理论推力线上;将无人机吊起,对Z轴方向的实际推力线进行判断:理论推力线和平面X=X0的交点为Z轴理论重心;经过吊挂点的地面法线和平面X=X0的交点为Z轴实际重心;计算理论推力线和实际推力线的调整夹角,通过调整夹角调整推力锥在Z轴方向的安装角度。本申请解决了现有技术中的无人机通过翻转工装翻转后测量调整角度,存在费时费力和误差较大的问题。技术研发人员:孙旭跃,董文辉,张晓攀受保护的技术使用者:西安羚控电子科技有限公司技术研发日:技术公布日:2024/5/6本文地址:https://www.jishuxx.com/zhuanli/20240722/220225.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表