一种无人机的载物升降装置的制作方法
- 国知局
- 2024-08-01 05:33:00
本申请涉及无人机载物,具体涉及一种无人机的载物升降装置。
背景技术:
1、目前,无人机在各种领域广泛应用,包括物流、农业、应急救援等。在物流领域,无人机下部通过安装容纳仓,能将小型及非异型货物迅速、高效地从一个地方运送到另一个地方。然而,在实际应用中,对于异型货物托运,如何实现货物的安全悬挂、以及如果实现物体的安全着陆成为一个挑战。传统的货物在接触地面时作业人员都是根据眼睛衡量,并手动控制载物升降装置停止放绳。由于肉眼因环境等因素的影响,作业人员无法准确且及时的控制载物升降装置的绳索的收缩长度,导致货物随着绳索下降到地面后,若载物升降装置释放绳子过长,很容易造成货物或无人机损害。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种无人机的载物升降装置,解决了作业人员无法准确且及时的控制载物升降装置的绳索的收缩长度而导致货物出现损坏的问题。
2、本申请提供了一种无人机的载物升降装置,包括:
3、无人机平台;
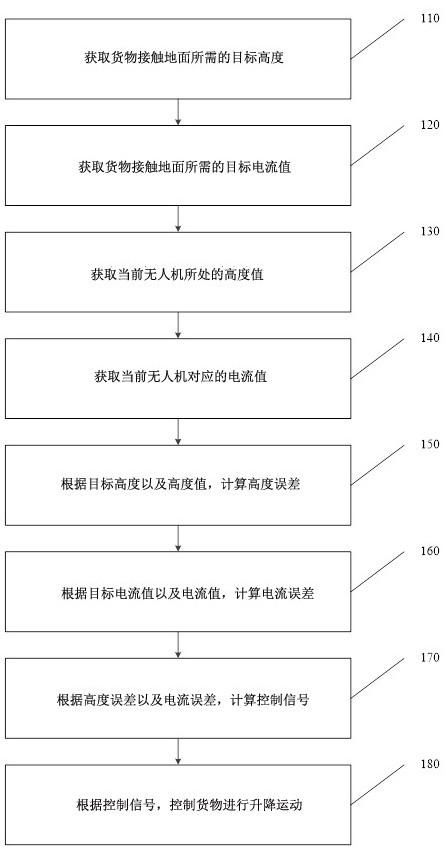
4、载物升降绞盘装置,所述载物升降绞盘装置与所述无人机平台的底部固定连接,所述载物升降绞盘装置包括设备安装板、电机固定板、线轮挡板、伺服电机、脱钩器、绞盘线轮、垂直梳线轮以及第二控制器,所述电机固定板的第一端与所述设备安装板的一侧固定连接,所述设备安装板的顶端与所述无人机平台的底部固定连接,所述线轮挡板的第一端与所述设备安装板的另一侧固定连接,所述伺服电机固定在所述电机固定板上,所述绞盘线轮的一端固定在所述线轮挡板上,所述绞盘线轮的另一端固定在所述电机固定板上,所述绞盘线轮的轴向筒上缠绕绳索,所述垂直梳线轮位于所述绞盘线轮的下方,所述垂直梳线轮的一端穿过所述线轮挡板,所述垂直梳线轮的另一端穿过所述电机固定板,所述绞盘线轮上的绳索的一端缠绕在所述垂直梳线轮的轴向筒上并与所述脱钩器固定连接,所述脱钩器用于固定货物,所述伺服电机的输出端穿过所述绞盘线轮,所述伺服电机用于驱动所述绞盘线轮旋转以调整所述绳索的长度,所述第二控制器位于所述伺服电机的下方并固定在所述电机固定板上,所述第二控制器与所述伺服电机电性连接,所述第二控制器用于获取货物接触地面所需的目标高度;
5、获取所述货物接触地面所需的目标电流值;
6、获取当前无人机所处的高度值;
7、获取所述当前无人机对应的电流值;
8、根据所述目标高度以及所述高度值,计算高度误差;
9、根据所述目标电流值以及所述电流值,计算电流误差;
10、根据所述高度误差以及所述电流误差,计算控制信号;
11、根据所述控制信号,控制所述货物进行升降运动。
12、在一实施例中,所述载物升降绞盘装置包括脱钩器阻挡块,所述脱钩器阻挡块的顶端分别与所述电机固定板的第二端、所述线轮挡板的第二端固定连接,所述脱钩器阻挡块包括容纳通孔,所述容纳通孔容纳所述脱钩器,所述绳索的一端穿过所述容纳通孔。
13、在一实施例中,所述绳索的一端穿过绞盘螺纹帽,所述脱钩器的外表面固定设置有螺杆,所述绞盘螺纹帽与所述螺杆螺纹连接,所述绞盘螺纹帽位于所述容纳通孔中。
14、在一实施例中,在所述脱钩器阻挡块的顶部固定连接有脱钩器限位开关,所述脱钩器限位开关与所述第二控制器通信连接,其中,当所述绞盘螺纹帽触碰所述脱钩器限位开关时,所述脱钩器限位开关传递电信号至所述第二控制器,所述第二控制器控制所述伺服电机停止工作。
15、在一实施例中,所述载物升降绞盘装置包括熔断器和舵机转向臂,所述熔断器固定在所述电机固定板上,所述熔断器与驱动舵机电性连接,所述舵机转向臂与所述驱动舵机连接,所述驱动舵机与所述第二控制器连接,所述第二控制器用于控制所述驱动舵机工作,所述驱动舵机用于驱动所述舵机转向臂沿着所述驱动舵机的轴线作同步运动,所述舵机转向臂安装有熔断电阻丝,所述熔断电阻丝用于熔断所述绳索。
16、在一实施例中,所述载物升降绞盘装置包括称重传感器,所述称重传感器的一端与固定板的底部固定连接,所述称重传感器的另一端与所述设备安装板的顶端固定连接,所述固定板的顶端与所述无人机平台固定连接。
17、在一实施例中,无人机的载物升降装置还包括外壳,所述外壳与所述固定板的边缘固定连接,所述外壳上设置有称重测量显示屏,所述称重测量显示屏与所述称重传感器通信连接,所述称重测量显示屏用于显示所述称重传感器测量的重量。
18、在一实施例中,所述固定板的顶端固定连接有两个滑轨底座,所述无人机平台的底部与安装板固定连接,所述安装板沿着所述两个滑轨底座的延伸方向进行滑动。
19、本申请提供的无人机的载物升降装置,包括:无人机平台;载物升降绞盘装置,所述载物升降绞盘装置包括设备安装板、电机固定板、线轮挡板、伺服电机、脱钩器、绞盘线轮、垂直梳线轮以及第二控制器,第二控制器用于获取货物接触地面所需的目标高度,获取货物接触地面所需的目标电流值,获取当前无人机所处的高度值,获取当前无人机对应的电流值,根据目标高度以及高度值,计算高度误差,根据目标电流值以及电流值,计算电流误差,根据高度误差以及电流误差,计算控制信号,根据控制信号,控制货物进行升降运动。通过获取货物接触地面所需的目标高度以及目标电流值,然后获取当前无人机所处的高度值以及电流值,最后可以计算得到控制信号,通过控制信号控制货物进行升降运动,进而保护货物落地时,防止货物撞击地面导致货物损坏。
技术特征:1.一种无人机的载物升降装置,其特征在于,包括:
2.根据权利要求1所述的无人机的载物升降装置,其特征在于,所述载物升降绞盘装置(20)包括脱钩器阻挡块(29),所述脱钩器阻挡块(29)的顶端分别与所述电机固定板(22)的第二端、所述线轮挡板(23)的第二端固定连接,所述脱钩器阻挡块(29)包括容纳通孔,所述容纳通孔容纳所述脱钩器(25),所述绳索的一端穿过所述容纳通孔。
3.根据权利要求2所述的无人机的载物升降装置,其特征在于,所述绳索的一端穿过绞盘螺纹帽(30),所述脱钩器(25)的外表面固定设置有螺杆,所述绞盘螺纹帽(30)与所述螺杆螺纹连接,所述绞盘螺纹帽(30)位于所述容纳通孔中。
4.根据权利要求3所述的无人机的载物升降装置,其特征在于,在所述脱钩器阻挡块(29)的顶部固定连接有脱钩器限位开关(31),所述脱钩器限位开关(31)与所述第二控制器(28)通信连接,其中,当所述绞盘螺纹帽(30)触碰所述脱钩器限位开关(31)时,所述脱钩器限位开关(31)传递电信号至所述第二控制器(28),所述第二控制器(28)控制所述伺服电机(24)停止工作。
5.根据权利要求1所述的无人机的载物升降装置,其特征在于,所述载物升降绞盘装置(20)包括熔断器(32)和舵机转向臂(33),所述熔断器(32)固定在所述电机固定板(22)上,所述熔断器(32)与驱动舵机(321)电性连接,所述舵机转向臂(33)与所述驱动舵机(321)连接,所述驱动舵机(321)与所述第二控制器(28)连接,所述第二控制器(28)用于控制所述驱动舵机(321)工作,所述驱动舵机(321)用于驱动所述舵机转向臂(33)沿着所述驱动舵机(321)的轴线作同步运动,所述舵机转向臂(33)安装有熔断电阻丝(331),所述熔断电阻丝(331)用于熔断所述绳索。
6.根据权利要求1所述的无人机的载物升降装置,其特征在于,所述载物升降绞盘装置(20)包括称重传感器(34),所述称重传感器(34)的一端与固定板(35)的底部固定连接,所述称重传感器(34)的另一端与所述设备安装板(21)的顶端固定连接,所述固定板(35)的顶端与所述无人机平台(10)固定连接。
7.根据权利要求6所述的无人机的载物升降装置,其特征在于,还包括外壳(40),所述外壳(40)与所述固定板(35)的边缘固定连接,所述外壳(40)上设置有称重测量显示屏(36),所述称重测量显示屏(36)与所述称重传感器(34)通信连接,所述称重测量显示屏(36)用于显示所述称重传感器(34)测量的重量。
8.根据权利要求6所述的无人机的载物升降装置,其特征在于,所述固定板(35)的顶端固定连接有两个滑轨底座(351),所述无人机平台(10)的底部与安装板(11)固定连接,所述安装板(11)沿着所述两个滑轨底座(351)的延伸方向进行滑动。
技术总结本申请提供的无人机的载物升降装置,包括:无人机平台;载物升降绞盘装置,载物升降绞盘装置包括设备安装板、电机固定板、线轮挡板、伺服电机、脱钩器、绞盘线轮、垂直梳线轮以及第二控制器,第二控制器用于获取货物接触地面所需的目标高度,获取货物接触地面所需的目标电流值,获取当前无人机所处的高度值,获取当前无人机对应的电流值,根据目标高度以及高度值,计算高度误差,根据目标电流值以及电流值,计算电流误差,根据高度误差以及电流误差,计算控制信号,根据所述控制信号,控制货物进行升降运动。通过获取当前无人机所处的高度值以及电流值,计算得到控制信号,通过控制信号可以控制货物落地时的高度,从而防止货物触地损坏。技术研发人员:赵安民,李克剑,肖雁起,王天诚,刘德山受保护的技术使用者:天津易科芯科技有限公司技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240722/220317.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表