无人机任意朝向接触式自充电机库控制方法与流程
- 国知局
- 2024-08-01 05:33:04
本发明涉及无人机,具体涉及无人机任意朝向接触式自充电机库控制方法。
背景技术:
1、无人机的应用方兴未艾,特别是配合无人机库实现了自动起降,正在消防、巡检、定点监控等领域推广应用,实现了无人机无人操作的定时、定航线全自动起降巡检,给工作带来极大方便。但是无人机普遍存在着续航时间短的问题,因此发展无人机自主充电技术很具有必要性。
2、无人机一般自主降落并停靠在机库中进行充电,现有的自主充电装置可分为无线式和接触式:
3、1)无线充电方式所需的机械结构简单,但充电效率较低;
4、2)接触式充电方式效率高,但需要较为复杂的机械结构,且对定位精准性要求较高。要求无人机以较小的位置和方向误差,准确的降落在机库的特定位置或对位装置上,或者通过推杆等机械装置将降落的无人机再次推移到准确的充电位置上,才能进行充电。
5、在定航线全自动起降巡检回到机库时,由于受到自然环境以及信号扰动的影响,无人机并不是每次都能降到机库的指定范围内,这对进行无人操作提出了更高的要求。
技术实现思路
1、本发明所要解决的技术问题是提供一种无人机任意朝向接触式自充电机库控制方法,能够用简单的结构实现无人机的任意朝向停放充电。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、无人机任意朝向接触式自充电机库控制方法,机库包括分设在上下两端的收纳式机库顶板和下支撑板,下支撑板用于停放无人机,无人机顶部设有充电杆,无人机的底部设有充电电极,收纳式机库顶板在无人机未停在下支撑板上时收纳于机库一侧,当无人机停在下支撑板上后,收纳式机库顶板移至无人机上方,充电杆可与收纳式机库顶板接触,收纳式机库顶板下端面和下支撑板上端面设有可用于无人机充电的正负极板,下支撑板下端面与升降装置连接,升降装置的升起位置时下支撑板不低于机库边缘;
4、机库呈长方体或者正方体框架,在机库顶端四角设有降落监测装置,降落监测装置用于对无人机降落时的空间位置进行定位以及对无人机是否超出降落区域进行检测;
5、降落监测装置包括与机库四角顶部固定连接的支撑杆体,支撑杆体上设有光幕组件,光幕组件成“l”形,“l”形两端面设有发射或接收装置,且“l”一端面为发射装置,另一端面为接收装置,四角的光幕组件两两相对并可在机库四角形成长方形或正方形的警戒光幕,光幕组件上端设有探测传感器,探测传感器可向上发送探测信号以感知与降落中的无人机之间的距离;
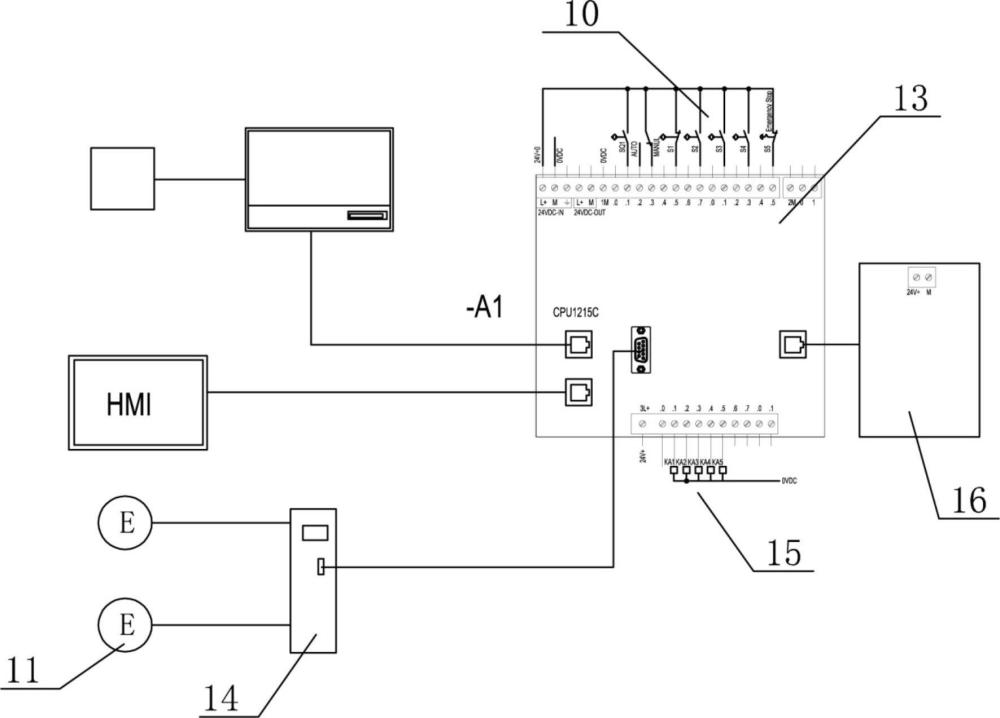
6、探测传感器与探测信号处理器电连接,探测信号处理器与控制器通讯连接,发射或接收装置与控制器输入端电连接,控制器与无线模块通讯连接,无线模块可与无人机通讯连接,控制器通过输出端连接的中间继电器对升降装置和收纳式机库顶板进行控制;
7、在无人机降落过程中,其降落控制及充电的具体步骤为:
8、step1、对无人机自主降落的参数进行设置,包括降落点坐标、下降高度、下降速度、微调速度、高度与微调速度对应速率表以及应急回退参数,对控制器参数进行设置,包括探测开始高度、探测器的扫描频率以及范围、高度与微调速度对应速率表、四周间隔允许差值、四周间隔差值调整目标以及充电控制参数;
9、step2、无人机自主降落过程中,先在下降高度处平移至降落点坐标上方,开始降落,降落过程中将高度信息通过无线模块发送至控制器;
10、step3、当无人机降落至探测开始高度时,控制器控制探测传感器开启,以设定的探测频率及范围对上方无人机进行扫描,并将返回的信号发送至探测信号处理器,同时控制发射或接收装置开启形成光幕墙;
11、step4、信号处理器根据返回的探测信号对当前的无人机所处位置的高度、位置信息进行精确定位,并生成当前的无人机三维模型并将数据传送至控制器,控制器通过与预设的机库精确坐标进行比较得到无人机与当前的降落区域四周之间的距离差值,如果该距离差值未超出四周间隔允许差值时,不对无人机的当前降落进行干扰并进入step7,若超出四周间隔允许差值,则进入step5;
12、step5、控制器根据计算得到的无人机与当前的降落区域四周之间的距离差值和四周间隔差值调整目标进行比较得到需要调整的方向和距离值,并通过高度与微调速度对应速率表得到微调的当前控制参数,并将当前的控制参数通过无线模块发送至无人机;
13、step6、无人机接收到当前控制参数,将控制参数与无人机存储的高度与微调速度对应速率表进行校核,校核通过后对无人机的降落过程进行微调,在微调过程中step4和step5不间断进行并更新当前控制参数,直至达到四周间隔差值调整目标且无人机不存在水平方向的位移,当校核不通过时,无人机停止降落并进行悬停,并重新进行step4和step5过程直至重校核完成后重新开始降落过程;
14、step7、无人机下降过程中,控制器不断对发射或接收装置信号进行检测,若发现发射或接收装置信号中断,即光幕墙被阻挡,代表无人机超出降落区域,立即停止无人机的降落过程和平移操作,并实现悬停,当悬停完成后重复步骤step4-step6直至达到四周间隔差值调整目标且无人机不存在水平方向的位移;
15、step8、无人机下降过程中,控制器控制电路向无人机的底部的充电电极发送探底电压信号;
16、step9、当无人机下降到与下支撑板接触时,下支撑板与无人机的底部的充电电极接触,探底电压信号通过下支撑板被控制器输入端探测到,此时控制器生成无人机停止信号,控制无人机旋翼停止;
17、step10、当无人机旋翼停止达到设定时间后,断开无人机的底部的充电电极与探底电压的连接,控制升降装置落下,当升降装置下降到极限位置时,控制收纳式机库顶板移至无人机上方与充电杆接触;
18、step11、控制收纳式机库顶板和下支撑板的充电的正负极板接入充电电压,并按照充电控制参数向无人机充电。
19、上述的充电杆为可收放充电杆,无人机不充电时可收放充电杆收纳至无人机内。
20、上述的收纳式机库顶板为由多块转动连接的板材连接而成,可以进行弯折,收纳式机库顶板由收纳电机驱动使其能在机库侧壁和顶部之间进行转位移动。
21、上述的支撑杆体和光幕组件之间还设有升降杆,升降杆顶端与光幕组件底部固定连接,升降杆下端与支撑杆体滑动连接,升降杆可受控升降。
22、上述的探测传感器在机库四角处的光幕组件上各设一个。
23、上述的探测传感器在机库四角中的两个对角处各设一个,共计个。
24、上述的探测传感器与探测信号处理器电连接,探测信号处理器与控制器通讯连接,发射或接收装置与控制器输入端电连接,控制器与无线模块通讯连接,无线模块可与无人机通讯连接,控制器通过输出端连接的中间继电器对升降装置和收纳式机库顶板进行控制。
25、上述的收纳式机库顶板下端面和下支撑板上端面设有可用于无人机充电的正负极板通过控制器控制是否接通电压。
26、本发明提供的一种无人机任意朝向接触式自充电机库控制方法,通过在无人机下降过程中不断对无人机进行举例探测和定位,对无人机的下降过程进行全程跟踪和微调,使无人机准确地降落至充电区域,并全自动进行调整和充电控制。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220326.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表