航天器推力布局及姿轨一体化控制方法
- 国知局
- 2024-08-01 05:34:40
本发明属于航天器推力布局设计和姿轨一体化控制,特别是涉及一种航天器推力布局及姿轨一体化控制方法。具体涉及一种满足推进器数量约束和非质心条件的航天器新型推力布局及姿轨一体化控制方法。
背景技术:
1、空间环境的日益复杂和人类对航天探索的日益渴望使航天器之间的联合工作任务不断增加,这也对航天器本身的性能指标和其在质量与空间等方面的利用效率提出了更高的要求。推进器的选取与设计对航天器性能指标有较大的影响。经调研,现有的推进系统设计主要使用在质心位置的推力发动机变轨,反作用飞轮或非质心位置的推力发动机等调节姿态,且使用的推进器数量较多,会消耗较多工质并增大航天器质量,影响航天器在联合工作任务中的机动性能和工作时长。
技术实现思路
1、本发明目的是针对当前多航天器联合任务需求导致的对航天器在质量、结构布局和控制精度上的要求,以及针对航天器推力器布局限制以及姿轨控一体化设计问题,提出了一种航天器推力布局及姿轨一体化控制方法。
2、本发明是通过以下技术方案实现的,本发明提出航天器推力布局及姿轨一体化控制方法,所述方法包括如下步骤:
3、步骤一:设计航天器非质心推力器布局方案,建立非质心飞行器动力学与运动学方程;
4、步骤二:将非质心推进航天器作为追踪飞行器,建立与主航天器之间的耦合相对运动模型,设计基于hill制导和滑模变结构姿态控制方法的姿轨一体化控制方案;
5、步骤三:针对非质心推进航天器无法实现任意状态控制的特点,设计基于开关逻辑方法的控制指令执行方案;
6、步骤四:结合前几步设计的模型与制导控制策略,进行非质心推进航天器伴飞任务的仿真实验分析。
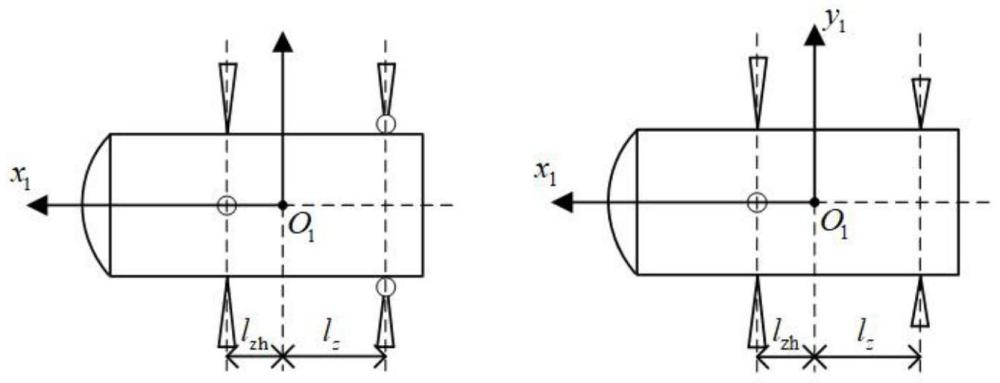
7、进一步地,在步骤一中,非质心推进航天器使用液体脉冲发动机实现变轨与姿态控制,分别在航天器质心前端和质心后端安装发动机;定义航天器的弹体坐标系o1-x1y1z1为:原点o1为伴飞航天器质心,o1x1轴为伴飞航天器纵轴,正方向为航天器顶部;o1y1轴在航天器弹体纵向平面内,垂直于o1x1轴,正方向为上;o1z1轴由右手定则决定;
8、航天器的质心前端按照十字型安装4台发动机,航天器的质心后端分别设计两种安装方案,一种为十字型安装,称为十字布局航天器,一种为v字型安装,称为v字布局航天器,分别使用6台和4台发动机,设r为航天器的半径;g1到g4为前端发动机的编号;zi为后端发动机的编号,对于十字布局航天器,i=1,2,l,6,对于v字布局航天器,i=1,2,l,4;lzh为前端发动机推力作用点在弹体z1轴方向上的距离;ly和lz分别为后端发动机在y1轴和z1轴方向上的距离,ly=lz;lzh<ly;
9、在弹体坐标系下,前端发动机工作产生的力和力矩为:
10、
11、式中,为前端发动机产生的力;为前端发动机产生的力矩;是前端第i个发动机的力的大小,i=1,2,l,4;
12、十字和v字布局航天器由后端发动机产生的力和力矩分别如式(2)和式(3)所示:
13、
14、
15、式中,为后端发动机产生的力;为后端发动机产生的力矩;是后端第i个发动机的力的大小,对于十字布局航天器,i=1,2,l,6,对于v字布局航天器,i=1,2,l,4。
16、进一步地,在步骤一中,定义地心惯性坐标系oi-xiyizi为:原点oi为地心,oixi轴为地球赤道平面与黄道平面的交线,正方向指向春分点;oizi垂直于oixi轴,正方向指向北极;oiyi轴在赤道平面内且垂直于oixi轴,正方向由右手定则决定,则非质心推进航天器的质心运动方程为:
17、
18、
19、式中:r为非质心推进航天器在地心惯性系中的位置;g为所受地球引力加速度;a为航天器发动机产生的加速度;xi、yi和zi表示航天器在地心惯性坐标系中的位置分量,和表示航天器在地心惯性坐标系中的速度分量;
20、采用基于欧拉角的姿态运动学方程,航天器的转动动力学方程和运动学方程为
21、
22、
23、式中,jx、jy、jz为航天器沿自身弹体坐标系的转动惯量;ωx、ωy、ωz为航天器的旋转角速率;为前端发动机产生的力矩;为后端发动机产生的力矩;θ、γ分别为航天器的俯仰角、偏航角和滚转角;为主航天器的轨道角速度。
24、进一步地,在步骤二中,主航天器进入椭圆轨道后,释放非质心推进航天器作为伴飞航天器,通过制导到达轨道坐标系下[-10 0 0]tm的相对位置,以此检验非质心推进航天器的变轨与姿态控制能力。
25、进一步地,在步骤二中,采用椭圆轨道上的hill制导方法设计非质心推进航天器的伴飞制导方案;定义航天器的轨道坐标系og-xgygzg为:原点og为主航天器质心,ogyg轴垂直于轨道面,正方向与主航天器飞行运动的角动量方向相反;ogzg轴垂直于ogyg轴,正方向指向地心;ogxg轴由右手定则决定;
26、在主航天器轨道坐标系下建立主航天器与伴飞航天器的相对运动方程:
27、
28、式中,k≡μ/h3/2=const,h为主航天器的动量矩,ax、ay、az为作用在伴飞器上的加速度在轨道坐标系三个轴上的分量;
29、设θ0和θ分别为当前时刻和hill制导终止时刻的真近点角,e为主航天器椭圆轨道的偏心率,令:
30、
31、
32、式中,ρ=1+ecosθ;s′=cosθ+ecos2θ;s=ρsinθ;c′=-(sinθ+esin2θ);c=ρcosθ;
33、令加速度为0,求解式(8)的状态转移矩阵,得到轨道面内的hill制导方法为:
34、
35、
36、轨道面外的hill制导方法为:
37、
38、式中,x0、y0和z0分别为当前时刻轨道坐标系下的相对位置;xt、yt和zt分别为hill制导终止时刻应该到达的轨道坐标系下的相对位置;和分别为当前时刻轨道坐标系下应该有的相对速度;和分别为hill制导终止时刻轨道坐标系下应该有的相对速度。
39、进一步地,在步骤二中,采用基于hill制导的速度增益方法来实现非质心推进航天器到目标相对位置的制导;利用式(12)和式(13)计算当前时刻伴飞航天器想要到达目标位置所需的速度增益δv,δv=v0-v,其中v为两航天器之间的相对速度,为需要的相对速度;在hill制导的一定时间内,导航装置不断提供主航天器与伴飞器之间的相对位置矢量和相对速度矢量,计算当下所需的速度增益δv,改变绝对加速度am的方向使|δv|减小,直至飞行器间的相对位置达到制导要求。
40、进一步地,根据δv,定义在姿态参考轨道坐标系下期望的控制力为:
41、
42、式中,fc为期望的控制力,fc=[fcx fcy fcz]t;为轨道坐标系到姿态参考轨道坐标系的转换矩阵;δv=[δvx δvy δvz]t;fmax为推进器最大推力;
43、设θ、γ分别为航天器的俯仰角、偏航角和滚转角,θc、γc分别为俯仰角、偏航角和滚转角指令;根据控制力指令fc确定航天器的姿态角指令为:
44、1)设和γc为0;
45、2)当fcy≠0且俯仰角基本跟踪俯仰角指令时,θc=-tan-1(fcx/fcy),否则维持上一步指令不变;
46、采用基于四元数的滑模变结构姿态控制律;定义姿态四元数q=[q0 q1 q2 q3]t,qv=[q1 q2 q3]t称作矢部,q0称作标部,q的范数等于1;设ω是绕质心转动的角速度矢量,状态变量x1=qv,x2=ω,建立状态方程为:
47、
48、式中,j=diag(jx,jy,jz)为转动惯量矩阵;tc为控制力矩;td为外部干扰力矩;上标×为叉乘操作符;
49、定义跟踪误差为:
50、
51、式中,是单位期望四元数,满足||qd||=1,ωd是期望角速度矢量;假设ωd和有界;
52、定义滑模函数和饱和函数分别为
53、s=e2+kee1=x2-x2r=ke(x1-x1r) (17)
54、
55、式中,ke为正定对角阵;δi为饱和函数的门限;
56、则根据式(17)和式(18),定义控制力矩tc为:
57、
58、式中,kd和ks为正定对角阵;
59、令四元数在t∈[0,0.5td]内匀加速变化,在t∈(0.5td,td]内匀减速变化,且前后两个半程的加速度大小相等,符号相反;则四元数所需的加速度为
60、
61、式中,为加速度;i=1,2,l,4;
62、四元数前半程的运动规律为
63、
64、式中,t∈[0,0.5td];i=1,2,l,4;
65、四元数后半程的运动规律为
66、
67、式中,t∈(0.5td,td];i=1,2,l,4;
68、确定四元数指令后,根据四元数运动方程求取期望角速度ωd。
69、进一步地,在步骤三中,定义姿态参考轨道坐标系og-xgarygarzgar为:原点og为主航天器质心,ogygar方向沿地心指向主航天器质心,ogzgar轴垂直于轨道面,正方向与主航天器飞行运动角动量方向相反;ogxgar轴由右手定则决定;
70、对fc和tc设置门限值,用1、0和-1来描述力与力矩指令;设fyd、fzd、mxd、myd、mzd分别为力与力矩指令;由于十字布局航天器俯仰通道独立,滚转和偏航通道耦合,把fzd、mxd和myd放在一起设计滚转和偏航通道的发动机分配方案,fyd和mzd放在一起设计俯仰通道的发动机分配方案;由于每个指令都只有1、0和-1三种情况,通过排列组合可以罗列出全部指令要求,即飞行过程中可能需要的全部工况,再分别针对每种指令要求设计前后端发动机的开关情况,获得全部开关情况后,在每个控制周期内获得力与力矩指令后,通过查表法确定发动机在当前时刻所需的开启与关闭情况,以执行力与力矩指令。
71、本发明还提出一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述航天器推力布局及姿轨一体化控制方法的步骤。
72、本发明还提出一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现所述航天器推力布局及姿轨一体化控制方法的步骤。
73、与现有技术相比,本发明的有益效果是:
74、本发明提供了一种航天器推力布局及姿轨一体化控制方法,本发明针对两航天器之间的伴飞任务,研究一种满足推进器数量约束和非质心条件的航天器新型推力布局及姿轨一体化控制方案。首先,对所设计的非质心推进航天器进行建模,基于hill制导和滑模变结构控制设计飞行器的姿轨一体化控制方法。然后,根据推力器的布局特点设计飞行器的控制指令执行方案,实现非质心推进航天器的伴飞制导控制。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220490.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。