一种混合式电控旋翼
- 国知局
- 2024-08-01 05:34:40
本发明涉及直升机操控,尤其涉及一种混合式电控旋翼。
背景技术:
1、直升机具有垂直起飞,空中悬停,以及向任意方向飞行的特殊飞行能力,这些功能是通过操纵旋翼获得的。目前处于研究热门的是电控旋翼,又称无自动倾斜器旋翼,使用旋转系下的作动机构实现旋翼控制,常见的电控旋翼有以下两种构型,后缘襟翼与桨根作动。后缘襟翼构型通过操纵位于桨叶后缘的襟翼偏转来实现桨叶的变距,进而实现对旋翼的操纵。然而,驱动襟翼的作动器要么布置于桨叶内部,在强离心力场下工作,其体积、重量受到限制,散热困难,且不便于维护;要么作动器布置在桨叶根部,通过桨叶内部的传动机构操纵襟翼偏转,这样虽然减小了作动器所受的离心力,但是驱动襟翼需要更大的扭矩,超长的传动机构存在着可靠性低的问题,在传动过程中可能出现卡死,且对桨叶的设计和制造工艺提出很高的要求。
2、为了克服后缘襟翼的缺陷,又出现了桨根驱动的方法,即利用布置在桨叶根部的作动器直接驱动桨叶变距,直接实现旋翼的操纵。但是这种方法要求作动器控制旋翼总距与周期变距,作动器不仅要输出巨大的力矩带动桨叶变距,同时还要能频繁往复作动,因此作动器以及其相关电子控制系统往往十分复杂且庞大,需要付出许多重量代价。
3、除此之外,目前任何构型的直升机,包括电控旋翼在内,均采用单一的旋翼操纵,即一套控制机构同时负责旋翼总距和周期变距,尽管有的方案中在传感器检测和电气电路方面做了多重冗余,但是在作动器层面没有备份,当遇到作动器失效时,就会立刻失去对旋翼的控制,这在飞行中是十分危险的。
4、总的来说,如何降低电控旋翼中作动器受到体积和重量限制程度,并还同时提升电控旋翼的安全冗余程度,成为了需要研究的课题。
技术实现思路
1、本发明的实施例提供一种混合式电控旋翼,能够降低电控旋翼中作动器受到体积和重量限制程度,并还同时提升电控旋翼的安全冗余程度。
2、为达到上述目的,本发明的实施例采用如下技术方案:
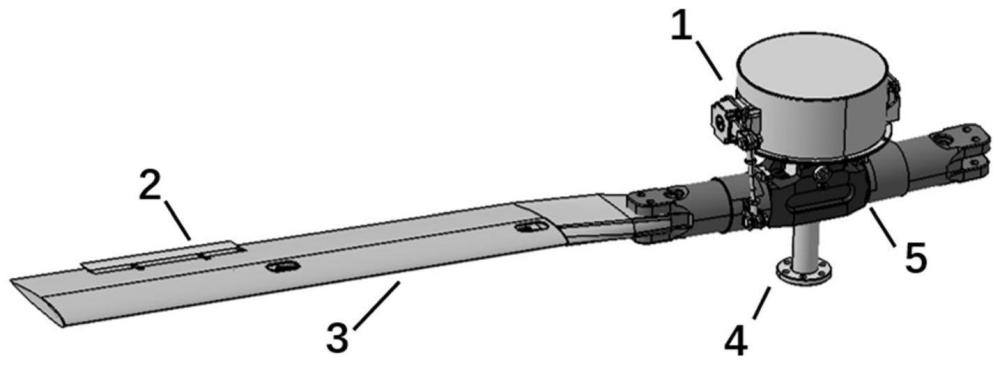
3、一种混合式电控旋翼,包括:总距作动系统(1)、周期变距作动系统(2)、桨叶(3)、旋翼轴(4)和桨毂(5);所述桨叶(3)通过桨毂(5)与旋翼轴(4)连接;与目前已有的旋翼结构类似的,桨叶(3)与桨毂(5)之间也设置有挥舞铰、摆振铰和变距铰,挥舞铰、摆振铰和变距铰的具体安装方式,本实施例中不再赘述;总距作动系统(1)通过总距作动器(6)带动桨叶(3)从而进行总距运动;周期变距作动系统(2)通过改变后缘襟翼(9)的偏转角度,产生相对于桨叶(3)变距轴线的俯仰力矩,从而进行周期变距。
4、其中,距作动系统(1)包括总距作动器(6)、变距拉杆(7)和扭力臂(8);周期变距作动系统(2),包括:襟翼(9)、襟翼传动机构(10)和周期变距作动器(11)。本实施例中的总距作动器(6)用于控制旋翼总距,作为总距作动器(6)要求作动器输出大,而对重量限制比较宽松,本发明实施例中可以采用输出扭矩为2nm,输出频率小于10hz的作动器作为总距作动器(6)。周期变距作动器(11)用于对桨叶施加周期性的力或力矩,本发明中周期变距作动器一般位于桨叶上,因此要求作动器重量尽可能轻,本发明实施例中可以采用输出幅值小于1nm,输出频率大于10hz的作动器作为周期变距作动器(11)。
5、进一步的,周期变距作动系统(2)安装在桨叶(3)上;总距作动系统(1)安装在桨毂(5)上;其中可选的,总距作动系统(1)安装在桨毂(5)与桨叶(3)连接处,总距作动器(6)的输出端连接变距铰。
6、可选的,在桨叶(3)的末端安装有可动桨尖(12),在桨叶(3)内部安装桨叶扭转传动机构(13)并连接可动桨尖(12);周期变距作动器(11)通过带动桨叶扭转传动机构(13),从而带动可动桨尖(12)进行上下周期偏转,以便于通过改变桨尖高动压区迎角来产生周期扭矩,使桨叶(3)进行周期变距。
7、可选的,在桨叶(3)上安装有分布压电式作动器(14),通过分布式压电作动器(14)使桨叶(3)产生周期弹性扭转,从而使桨叶(3)进行周期变距。
8、本发明实施例提供的混合式电控旋翼,相对比于现有的自动倾斜器旋翼操纵系统,本发明不再使用自动倾斜器、机械/液压操纵杆系,可以减轻作动器以及相关机构的体积和重量,从而降低电控旋翼中作动器受到体积和重量限制程度;同时使用两种不同的旋翼操纵技术,实现旋翼总距和周期变距的独立操纵控制,不仅对作动器的要求降低,更容易实现,在特殊情况下,可依靠其中任意一种操纵技术实现旋翼的控制,使得旋翼操纵具有多重冗余度,从而提升电控旋翼的安全冗余程度。
技术特征:1.一种混合式电控旋翼,其特征在于,包括:总距作动系统(1)、周期变距作动系统(2)、桨叶(3)、旋翼轴(4)和桨毂(5);
2.根据权利要求1所述的混合式电控旋翼,其特征在于,总距作动系统(1)包括总距作动器(6)、变距拉杆(7)和扭力臂(8);
3.根据权利要求2所述的混合式电控旋翼,其特征在于,周期变距作动系统(2)安装在桨叶(3)上;
4.根据权利要求1-3中任意一项所述的混合式电控旋翼,其特征在于,周期变距作动器(11)安装在桨叶(3)内部。
5.根据权利要求4中任意一项所述的混合式电控旋翼,其特征在于,周期变距作动系统(2)驱动桨叶(3)尖部高动压区域进行扭转。
6.根据权利要求3所述的混合式电控旋翼,其特征在于,总距作动器(6)通过总距作动器支架(15)与桨毂(5)连接;
7.根据权利要求3所述的混合式电控旋翼,其特征在于,周期变距作动器(11)安装在桨叶(3)的根部,襟翼传动机构(10)的一端连接周期变距作动器(11),襟翼传动机构(10)的另一端连接后缘襟翼(9);
8.根据权利要求3所述的混合式电控旋翼,其特征在于,在总距作动系统(1)处于失效状态下,由周期变距作动系统(2)产生恒定的俯仰力矩,从而进行总距控制;
9.根据权利要求3所述的混合式电控旋翼,其特征在于,在桨叶(3)的末端安装有可动桨尖(12),在桨叶(3)内部安装桨叶扭转传动机构(13)并连接可动桨尖(12);
10.根据权利要求3所述的混合式电控旋翼,其特征在于,在桨叶(3)上安装有分布式压电作动器(14),通过分布式压电作动器(14)使桨叶(3)产生周期弹性扭转,从而使桨叶(3)进行周期变距。
技术总结本发明实施例公开了一种混合式电控旋翼,涉及直升机操控技术领域,能够降低电控旋翼中作动器受到体积和重量限制程度,并还同时提升电控旋翼的安全冗余程度。本发明包括:不再使用自动倾斜器、机械/液压操纵杆系,可以减轻作动器以及相关机构的体积和重量,从而降低电控旋翼中作动器受到体积和重量限制程度;同时使用两种不同的旋翼操纵技术,实现旋翼总距和周期变距的独立操纵控制,不仅对作动器的要求降低,更容易实现,在特殊情况下,可依靠其中任意一种操纵技术实现旋翼的控制,使得旋翼操纵具有多重冗余度,从而提升电控旋翼的安全冗余程度。技术研发人员:叶绵鸿,陆洋,王昶天,袁杨,秦港受保护的技术使用者:南京航空航天大学技术研发日:技术公布日:2024/5/9本文地址:https://www.jishuxx.com/zhuanli/20240722/220489.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表