一种使用倾转共轴电机的碟形三旋翼垂起无人机及其工作方法
- 国知局
- 2024-08-01 05:37:31
本发明属于垂直起降无人飞行器,具体涉及一种使用倾转共轴电机的碟形三旋翼垂起无人机。
背景技术:
1、目前无人机应用场合越来越多,对无人机性能要求不断提高,例如物资运输、侦察敌情、巡航监视、精准打击等。传统的多旋翼无人机灵活性高,但是续航短,航程有限,气动效率低。固定翼无人机航程大,滞空时间长,但是对起飞场地要求高,需要空旷平坦的空地滑跑起飞。将固定翼与多旋翼无人机结合设计,使得固定翼可以垂直起降成为当下的趋势。
2、碟形飞行器升力系数大,失速迎角较高;俯仰稳定性好;机体强度高;碟形机身可产生前缘涡,在低雷诺数下工作可在占用很小空间的情况下实现较大的载重。共轴反桨旋翼可以在有限的尺寸下提供更大的拉力,提高8%~16%的机械效率,其后方可产生更高的风速吹拂翼面。
技术实现思路
1、本发明的目的在于提供一种使用倾转共轴电机的碟形三轴五旋翼垂起无人机,通过控制倾转舵机的角度和多个旋翼的转速,主要动力源为一对共轴异向电机和尾部涵道电机,实现固定翼无人机的垂直起降,在垂直起降模式和固定翼飞行模式之间切换,并增大其航程和载重量。
2、本发明的技术方案:
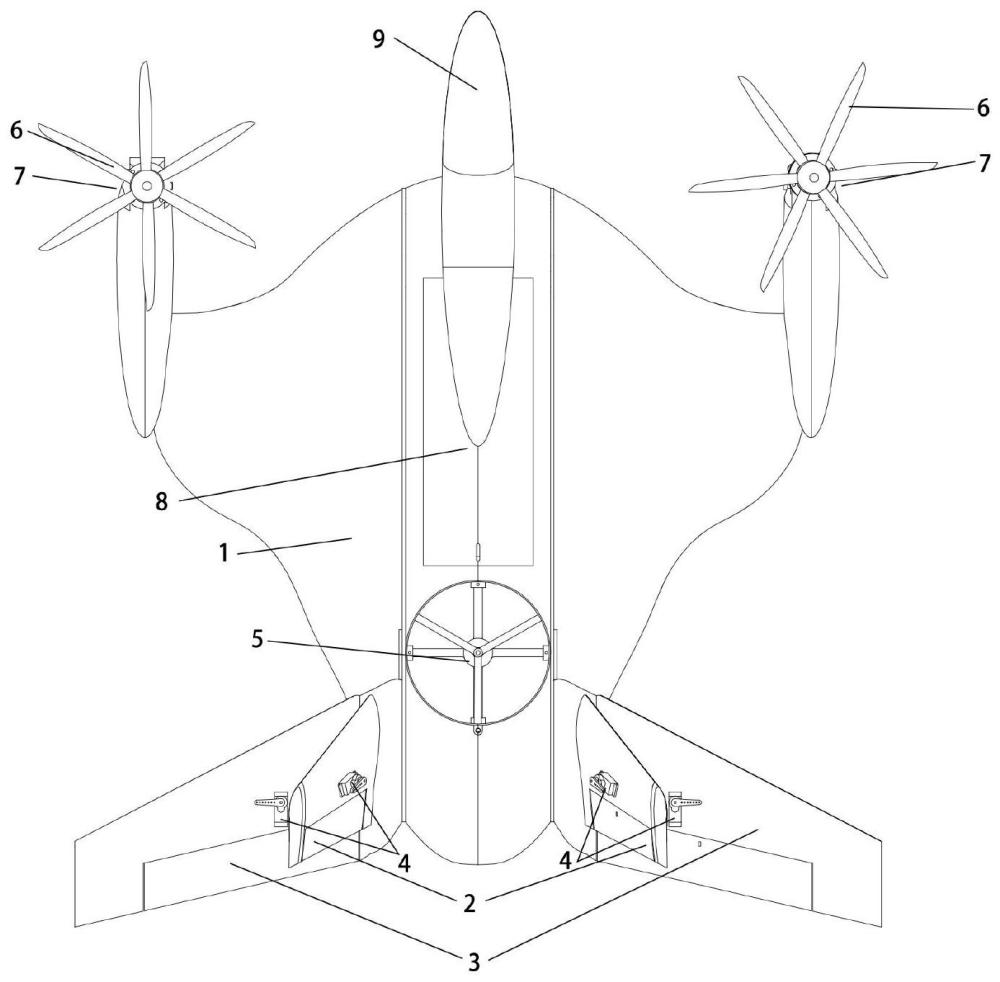
3、一种使用倾转共轴电机的碟形三旋翼垂起无人机,所述的碟形三旋翼垂起无人机在碟形机身1基础上,增设共轴反桨电机旋翼6、尾部电机旋翼5、倾转舵机7和倾转舵机支架11。
4、所述的尾部电机旋翼5位于碟形飞行器中部靠后的位置;共轴反桨电机旋翼6、倾转舵机7分别位于碟形飞行器的左右两侧对称分布;共轴反桨电机旋翼6、倾转舵机7与尾部电机旋翼5呈等腰三角形分布。两个共轴反桨电机旋翼6和尾部电机旋翼5转速独立控制,实现垂直起降和固定翼模式。
5、所述的碟形机身1是以中轴线对称的,由主体机身、左右主翼形成的一体碟形结构。2个水平尾翼3以碟形机身1的主翼中轴线为轴对称固定在碟形机身1尾部,2个垂直尾翼2以碟形机身1的主翼中轴线为轴对称固定在碟形机身1尾部。4个舵面舵机4分别嵌入在2个水平尾翼3、2个垂直尾翼2中,使用自攻螺丝固定。
6、进一步地,所述的尾部电机旋翼5包括电机及其旋翼51、电机座52和涵道圈53;所述的涵道圈53与碟形机身1固定,电机座52与涵道圈53固定,电机及其旋翼51固定到电机座52上,实现与碟形机身1的固定。
7、进一步地,所述的共轴反桨电机旋翼6包括左旋翼一61、左旋翼二62、右旋翼一63、右旋翼二64,所述左旋翼一61与左旋翼二62共轴异向转动,所述右旋翼一63、右旋翼二64共轴异向转动。左旋翼一61与右旋翼二64的旋转方向相同,左旋翼二62与右旋翼一63的旋转方向相同。所述的左旋翼一61、左旋翼二62、右旋翼一63、右旋翼二64分别通过电子调速器与控制器相连。所述的共轴反桨旋翼6可跟随倾转舵机7的摇臂进行0~180°范围内转动。
8、进一步地,所述的倾转舵机支架11包括倾转装置外壳a160、倾转装置外壳b161、倾转装置外壳c162、倾转装置外壳d163、舵机支座72、安装杆74和倾转装置连接件75;所述的共轴反桨旋翼6外侧被电机保护罩77包裹,电机保护罩77安装在电机支座73上,所述电机支座73两侧固定在倾转舵机7上;所述的舵机支座72用于固定倾转舵机7,并通过安装杆74与倾转装置连接件75相连接。倾转装置连接件75固定在碟形机身1的侧边。倾转装置外壳a160和倾转装置外壳b161、倾转装置外壳c162和倾转装置外壳d163分别用于将碟形机身1两侧的安装杆74、倾转装置连接件75、倾转舵机7和舵机支座72;
9、进一步的,所述的碟形机身1包括主翼碳杆a121、主翼碳杆b122、平尾碳杆123、垂尾碳杆124、平垂尾连接件131、垂尾翼尖135、机舱加强板142、主翼加强板143、舱盖150、机身a151、机身b152、主翼a153、主翼b154、垂直尾翼a156、垂直尾翼b157、水平尾翼a158、水平尾翼b159;
10、机身a151处于前部,底部固定机舱加强板142,顶部设置舱盖150;机身a151的两侧与主翼a153、主翼b154之间处分别设置一个主翼加强板143,机身a151、主翼a153、主翼b154、主翼加强板143通过平行的主翼碳杆a121、主翼碳杆b122固定,主翼碳杆a121、主翼碳杆b122的两端分别连接倾转舵机支架11具体可以连接倾转舵机支架11上的倾转装置连接件75。两个主翼加强板143后端设置平垂尾连接件131,平垂尾连接件131上固定平尾碳杆123、垂尾碳杆124,平尾碳杆123、垂尾碳杆124分别与水平尾翼3、垂直尾翼2固定,垂尾翼尖135设置于垂直尾翼2顶端。机身b152处于后部,位于平垂尾连接件131之间。
11、更进一步地,所述的尾部电机旋翼5位于机身a151和机身b152之间。
12、进一步地,机头9包括机头加强板141、机头主体155和机头舱盖136。
13、本发明的有益效果:
14、在拥有固定翼飞行器长航程、大载重的基础上,实现垂直起降功能,降低对起降场地的要求,提高飞行器使用的便利性,适应现实中复杂的使用场景;
15、碟形机身拥有相对于传统机身更好的气动效果:碟形机身升力系数大、失速迎角较高、俯仰稳定性好;碟形机身可产生前缘涡,在低雷诺数下工作可在占用很小空间的情况下实现较大的载重。
16、共轴反桨旋翼可以在有限的尺寸下提供更大的拉力,提高8%~16%的机械效率,其后方可产生更高的风速吹拂碟形机身的翼面,二者相结合后,升力增加效果明显,利于增大载重量、增大飞行器航程。
技术特征:1.一种使用倾转共轴电机的碟形三旋翼垂起无人机,其特征在于,所述的碟形三旋翼垂起无人机在碟形机身(1)基础上,增设共轴反桨电机旋翼(6)、尾部电机旋翼(5)、倾转舵机(7)和倾转舵机支架(11);
2.根据权利要求1所述的一种使用倾转共轴电机的碟形三旋翼垂起无人机,其特征在于,所述的尾部电机旋翼(5)包括电机及其旋翼(51)、电机座(52)和涵道圈(53);所述的涵道圈(53)与碟形机身(1)固定,电机座(52)与涵道圈(53)固定,电机及其旋翼(51)固定到电机座(52)上,实现与碟形机身(1)的固定。
3.根据权利要求1所述的一种使用倾转共轴电机的碟形三旋翼垂起无人机,其特征在于,所述的共轴反桨电机旋翼(6)包括左旋翼一(61)、左旋翼二(62)、右旋翼一(63)、右旋翼二(64),所述左旋翼一(61)与左旋翼二(62)共轴异向转动,所述右旋翼一(63)、右旋翼二(64)共轴异向转动;左旋翼一(61)与右旋翼二(64)的旋转方向相同,左旋翼二(62)与右旋翼一(63)的旋转方向相同;所述的左旋翼一(61)、左旋翼二(62)、右旋翼一(63)、右旋翼二(64)分别通过电子调速器与控制器相连;所述的共轴反桨旋翼(6)可跟随倾转舵机(7)的摇臂进行0~180°范围内转动。
4.根据权利要求1所述的一种使用倾转共轴电机的碟形三旋翼垂起无人机,其特征在于,所述的倾转舵机支架(11)包括倾转装置外壳a(160)、倾转装置外壳b(161)、倾转装置外壳c(162)、倾转装置外壳d(163)、舵机支座(72)、安装杆(74)和倾转装置连接件(75);所述的共轴反桨旋翼(6)外侧被电机保护罩(77)包裹,电机保护罩(77)安装在电机支座(73)上,所述电机支座(73)两侧固定在倾转舵机(7)上;所述的舵机支座(72)用于固定倾转舵机(7),并通过安装杆(74)与倾转装置连接件(75)相连接;倾转装置连接件(75)固定在碟形机身(1)的侧边;倾转装置外壳a(160)和倾转装置外壳b(161)、倾转装置外壳c(162)和倾转装置外壳d(163)分别用于将碟形机身(1)两侧的安装杆(74)、倾转装置连接件(75)、倾转舵机(7)和舵机支座(72)。
5.根据权利要求1所述的一种使用倾转共轴电机的碟形三旋翼垂起无人机,其特征在于,所述的碟形机身(1)包括主翼碳杆a(121)、主翼碳杆b(122)、平尾碳杆(123)、垂尾碳杆(124)、平垂尾连接件(131)、垂尾翼尖(135)、机舱加强板(142)、主翼加强板(143)、舱盖(150)、机身a(151)、机身b(152)、主翼a(153)、主翼b(154)、垂直尾翼a(156)、垂直尾翼b(157)、水平尾翼a(158)、水平尾翼b(159);
6.根据权利要求5所述的一种使用倾转共轴电机的碟形三旋翼垂起无人机,其特征在于,所述的尾部电机旋翼(5)位于机身a(151)和机身b(152)之间。
7.根据权利要求5所述的一种使用倾转共轴电机的碟形三旋翼垂起无人机,其特征在于,机头(9)包括机头加强板(141)、机头主体(155)和机头舱盖(136)。
8.权利要求1-7任一所述的一种使用倾转共轴电机的碟形三旋翼垂起无人机的工作模式,其特征在于,具体如下:
技术总结本发明属于垂直起降无人飞行器技术领域,提供了一种使用倾转共轴电机的碟形三旋翼垂起无人机及其工作方法。本发明的目的在于提供一种使用倾转共轴电机的碟形三旋翼垂起无人机,通过控制倾转舵机的角度和多个旋翼的转速,将主要动力源改为一对共轴异向电机,实现固定翼无人机的垂直起降,在垂直起降模式和固定翼飞行模式之间切换,并增大其航程和载重量。本发明适应更多场景,相对于传统固定翼无人机,可以实现垂直起降,无需专用的起降跑道;将碟形机身和大拉力、高效率的共轴异转旋翼相结合,升力系数大,失速迎角较高,俯仰稳定性好,在低雷诺数下工作可在占用很小空间的情况下实现较大的载重。技术研发人员:吴玉虎,沈振华,吕宗阳,周文雅,孙希明受保护的技术使用者:大连理工大学技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/220699.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种轻型垂直起降飞行器
下一篇
返回列表