机翼自清洁装置和仿生扑翼飞行机器人
- 国知局
- 2024-08-01 05:39:29
本技术涉及微型飞行器设计及制造,具体而言,涉及一种机翼自清洁装置和仿生扑翼飞行机器人。
背景技术:
1、仿生扑翼飞行机器人是一种模仿鸟类和昆虫飞行,基于仿生学原理设计制造的新型飞行机器人。目前,扑翼飞行机器人的发展已成为重点研究领域,应用前景广阔。但是,现有技术中的大多数扑翼飞行机器人,其机翼在飞行过程中若附着尘土,只能等待完成飞行任务返航后再由人工使用工具清洁。然而,一旦飞行过程中穿越多尘复杂环境,其机翼极有可能因为附着大量尘土导致飞行性能下降,甚至由于未能及时清理,灰尘在扑翼过程中抖动落入扑翼机械机构或电路中造成整体功能的损坏,最终导致坠落的潜在风险。因此,基于目前存在的机翼清洁问题,亟需设计一种能够自主完成机翼清洁的装置。
技术实现思路
1、本技术提供一种机翼自清洁装置和仿生扑翼飞行机器人,解决了仿生扑翼飞行机器人在飞行任务中机翼除尘的问题,可提高扑翼飞行机器人的抗尘环境适应能力。
2、具体的技术方案如下:
3、第一方面,本技术实施例提供了一种机翼自清洁装置,所述机翼自清洁装置应用于仿生扑翼飞行机器人,包括:
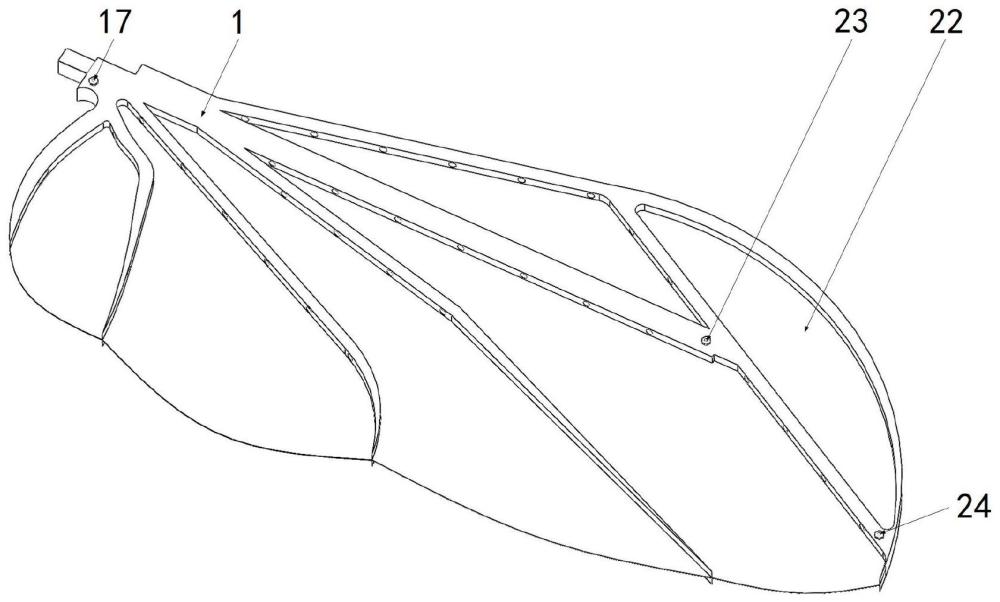
4、两组翼部支撑结构,两组所述翼部支撑结构呈镜面对称设置于所述仿生扑翼飞行机器人的翼膜的两侧,每组所述翼部支撑结构均分别包括多个支撑杆,多个所述支撑杆位于所述仿生扑翼飞行机器人的翼根的一端一体连接,且多个所述支撑杆从所述仿生扑翼飞行机器人的翼根向翼尖的延伸方向呈树状分叉结构;
5、多个空心翅脉管道,每个所述支撑杆的内部均分别设置有一个所述空心翅脉管道,且多个所述空心翅脉管道在多个所述支撑杆的连接处汇流于一个主输送管道;
6、微型水泵,每组所述翼部支撑结构在多个所述支撑杆的连接处设置有入水口,所述微型水泵的输水端通过所述入水口与所述主输送管道相连通,所述微型水泵的抽水端与机载储水罐相连通;
7、多个出水小孔,每个所述支撑杆垂直于所述翼膜的相对两长侧面上分别设置有多个所述出水小孔,所述空心翅脉管道通过所述出水小孔连通所述翼部支撑结构的外部环境;
8、多个出水孔开合件,每个所述空心翅脉管道内均分别设置有一个所述出水孔开合件,所述出水孔开合件在完全覆盖每个所述出水小孔的隔离位置和完全打开每个所述出水小孔的打开位置之间往复移动,当所述出水孔开合件位于所述隔离位置时,所述空心翅脉管道与所述翼部支撑结构的外部环境相隔离,当所述出水孔开合件位于所述打开位置时,所述空心翅脉管道与所述翼部支撑结构的外部环境相连通。
9、在本技术的一些实施例中,每组所述翼部支撑结构均分别还包括加固杆,所述加固杆在与所述翼膜平行的平面上延伸设置,位于所述翼部支撑结构远离所述翼根的一端,且所述加固杆与一个或多个所述支撑杆相连;
10、所述加固杆的内部设置有一个所述空心翅脉管道,所述加固杆的所述空心翅脉管道与其相连的其中一个所述支撑杆的所述空心翅脉管道相连通,且所述加固杆垂直于所述翼膜的相对两长侧面上分别设置有多个所述出水小孔,所述加固杆的所述空心翅脉管道内设置有一个所述出水孔开合件。
11、在本技术的一些实施例中,每组所述翼部支撑结构的所述支撑杆的个数为六个,分别记为第一支撑杆、第二支撑杆、第三支撑杆、第四支撑杆、第五支撑杆和第六支撑杆,所述第一支撑杆和所述第六支撑杆沿所述翼膜的边缘设置,所述第二支撑杆、所述第三支撑杆、所述第四支撑杆和所述第五支撑杆依次设置于所述第一支撑杆与所述第六支撑杆之间,且所述第一支撑杆、所述第二支撑杆、所述第三支撑杆、所述第四支撑杆以及所述第六支撑杆的长度依次递增,所述加固杆的第一端与所述第六支撑杆的中端相连,所述加固杆的第二端与所述第六支撑杆远离所述翼根的一端相连,所述加固杆的中端与所述第五支撑杆远离所述翼根的一端相连,所述加固杆的所述空心翅脉管道与所述第六支撑杆的所述空心翅脉管道相连通。
12、在本技术的一些实施例中,每组所述翼部支撑结构均分别设置有第一螺栓孔、第二螺栓孔、第三螺栓孔,所述第一螺栓孔设置于所述翼部支撑结构在多个所述支撑杆的连接处,且位于所述主输送管道的一侧,所述第二螺栓孔设置于所述第五支撑杆远离所述翼根的一端,且位于所述第五支撑杆的所述空心翅脉管道和所述加固杆的所述空心翅脉管道之间,所述第三螺栓孔设置于所述加固杆的第二端,且位于所述加固杆的所述空心翅脉管道的一侧,
13、第一紧固螺栓依次穿设其中一组所述翼部支撑结构的所述第一螺栓孔、所述翼膜、另一组所述翼部支撑结构的所述第一螺栓孔并通过第一螺母紧固,第二紧固螺栓依次穿设其中一组所述翼部支撑结构的所述第二螺栓孔、所述翼膜、另一组所述翼部支撑结构的所述第二螺栓孔并通过第二螺母紧固,第三紧固螺栓依次穿设其中一组所述翼部支撑结构的所述第三螺栓孔、所述翼膜、另一组所述翼部支撑结构的所述第三螺栓孔并通过第三螺母紧固。
14、在本技术的一些实施例中,当所述仿生扑翼飞行机器人飞行降落后,所述翼膜平行地面设置时,远离地面设置的所述翼部支撑结构中的每个所述出水小孔的中心轴线与所述翼膜所在平面之间呈预设夹角,且所述出水小孔的出水端与所述翼膜之间的距离大于所述出水小孔的进水端与所述翼膜之间的距离。
15、在本技术的一些实施例中,所述出水孔开合件包括微型旋转电机、连接杆以及多个封堵板,所述连接杆的一端与所述微型旋转电机的输出端相连,每个所述出水小孔处分别对应设置一个所述封堵板,所述封堵板靠近所述出水小孔的端面为圆弧柱面,每个所述封堵板分别与所述连接杆相连,当所述微型旋转电机将所述出水孔开合件旋转至所述隔离位置时,多个所述封堵板分别对每个所述出水小孔进行完全覆盖封堵,当所述微型旋转电机将所述出水孔开合件旋转至所述打开位置时,每个所述出水小孔均处于完全打开状态。
16、在本技术的一些实施例中,所述出水孔开合件包括微型伸缩电机、连接杆以及多个封堵板,所述连接杆的一端与所述微型伸缩电机的输出端相连,每个所述出水小孔处分别对应设置一个所述封堵板,所述封堵板靠近所述出水小孔的端面为圆弧柱面,每个所述封堵板分别与所述连接杆相连,当所述微型伸缩电机将所述出水孔开合件移动至所述隔离位置时,多个所述封堵板分别对每个所述出水小孔进行完全覆盖封堵,当所述微型伸缩电机将所述出水孔开合件移动至所述打开位置时,每个所述出水小孔均处于完全打开状态。
17、在本技术的一些实施例中,位于每个所述支撑杆的每侧的多个所述出水小孔均等距离均匀分布,且位于所述支撑杆的相对两侧上的多个所述出水小孔对称设置。
18、在本技术的一些实施例中,所述翼部支撑结构和所述出水孔开合件均选用碳纤维板材,所述翼膜选用聚氯乙烯塑料膜;
19、所述翼膜与两组所述翼部支撑结构之间胶合连接。
20、第二方面,本技术实施例提供了一种仿生扑翼飞行机器人,包括第一方面所述的机翼自清洁装置。
21、本技术实施例的有益效果如下:
22、该机翼自清洁装置能够自主且有效地冲洗附着在机翼表面的尘土等杂物,保证机翼性能的稳定性,使仿生扑翼飞行机器人无需返航即可实现机翼清洁,大大提高了扑翼飞行机器人的抗尘环境适应能力。此外,空心翅脉管道内的出水孔开合件可控制出水小孔的打开和关闭,当机翼的自清洁任务完成后,通过出水孔开合件及时地将出水小孔关闭,以将空心翅脉管道与外界隔离,防止外界杂物进入空心翅脉管道内所导致的管道堵塞潜在风险。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220876.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表