一种用于风机叶片巡检的无人机载荷平台的制作方法
- 国知局
- 2024-08-01 05:43:30
本发明属于无人机载荷,特别涉及一种用于风机叶片巡检的无人机载荷平台。
背景技术:
1、风机叶片作为风力发电过程中的核心部件,在承受大载荷的恶劣环境下持续工作叶片表面会出现诸如:表面磨损、沙眼、裂纹、开裂、碳化等问题,如果没有即使发现和处理会进一步导致风机故障,一系列维修成本及停机期间无法正常发电均会影响风电场站的功率输出和收益,因此对于风机叶片表面巡检有非常重要的必要性。
2、市面上无人机巡检风机叶片有视觉解决方案、激光雷达+视觉的解决方案,视觉方案要求风机叶片呈倒“y”姿态,采集风机朝向信息后在本地生成航线文件,再次飞行航线的过程中进行风机叶片图像采集,此种方案无激光雷达测距技术做支撑无法确保飞机距离叶片为设定距离过渡依赖无人机精准定位,rtk信号不稳定以及叶片的弧度对图像采集的质量均有较大影响,需人工调整风机叶片到固定姿态作业难度大,单架次巡检效率低耗时多操作流程复杂;激光雷达结合视觉解决方案需要先挂载激光雷达载荷对风机进行三维建模并生成飞行航线,返航后再更换相机载荷对叶片进行图像采集,在图像采集过程仍然无法确保无人机与叶片的距离为设定距离,无精准拍照功能会出现风机叶尖部分出现空拍的可能导致漏检现象,巡检过程操作复杂且低效。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种用于风机叶片巡检的无人机载荷平台。
2、为了实现上述目的,本发明采用了如下技术方案:
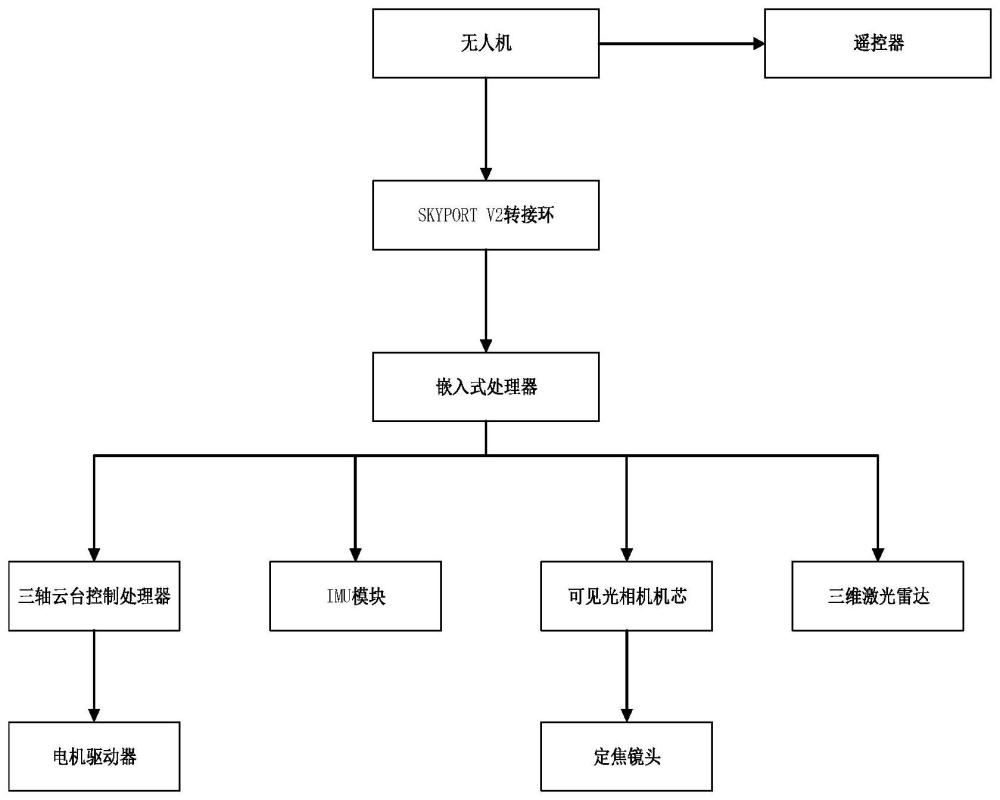
3、设计一种用于风机叶片巡检的无人机载荷平台,包括无人机、skyport v2转接环、嵌入式处理器、三轴云台、直流电机驱动器、imu模块、可见光相机和三维激光雷达;
4、所述三轴云台通过skyport v2转接环与无人机连接进行信息交互,imu模块采集当前位姿信息通过i2c通信方式与嵌入式处理器信息交互实现对云台姿态实时感知,云台控制器通过串行通信方式点对点的接收控制指令,作为执行单元的驱动器驱动电机完成云台控制,三维激光雷达通过网口将采集的点云数据传输至嵌入式处理器,可见光相机通过micro-b接口实现控制指令下发与文件传输。
5、作为优选,所述无人机采用四旋翼无人机作为通用平台,通过无线电技术可以推送相机直播画面至遥控器端显示,通过低速通道实现指令下发,高速通道实现数据交互,通过rtk融合gps实现精准定位结合先进的飞控算法实现精准悬停。
6、作为优选,所述载荷平台高度集成三轴云台、三维激光雷达、可见光相机、嵌入式处理器作为通用平台。
7、作为优选,所述三轴云台精准转动相机和三维激光雷达到目标位置,通过传感器感知无人机机身的姿态和运动趋势,驱动电机反向移动从而保持与地面的相对位置实现图像增稳。
8、作为优选,所述嵌入式处理器是一款高性能低功耗四核应用处理器,搭载linux系统移植psdk框架实现对云台、相机、航线规划、消息订阅等模块的管理。
9、作为优选,所述三维激光雷达具有远量程、高精度、宽视角、重量轻和高可靠性等特点,通过对采集的点云数据解算知悉当前航点无人机距离风机叶片的位置坐标信息。
10、作为优选,所述可见光相机可以实现毫米级别精度的图像采集,同时实时推送视频流画面到遥控器界面供飞行人员巡检监测。
11、本发明的有益效果:本发明在风机叶片任意姿态下均可进行巡检任务,对风机实时三维建模并生成飞行航线提高了单架次叶片巡检效率,确保无人机在对应航点精准悬停相对风机叶片距离为预设值,避免相对距离与悬停位置偏差出现空拍或未全面覆盖叶片表面的情况,添加精准拍照功能确保在航点时风机叶片始终在画幅中央,进一步保证了采集图像的质量同时避免空拍情况,为后期数据处理提供强可靠性。
技术特征:1.一种用于风机叶片巡检的无人机载荷平台,其特征在于:包括无人机、skyport v2转接环、嵌入式处理器、三轴云台、直流电机驱动器、imu模块、可见光相机和三维激光雷达;
2.根据权利要求1所述的一种用于风机叶片巡检的无人机载荷平台,其特征在于:所述无人机采用四旋翼无人机作为通用平台,通过无线电技术可以推送相机直播画面至遥控器端显示,通过低速通道实现指令下发,高速通道实现数据交互,通过rtk融合gps实现精准定位结合先进的飞控算法实现精准悬停。
3.根据权利要求1所述的一种用于风机叶片巡检的无人机载荷平台,其特征在于:所述三轴云台精准转动相机和三维激光雷达到目标位置,通过传感器感知无人机机身的姿态和运动趋势,驱动电机反向移动从而保持与地面的相对位置实现图像增稳。
4.根据权利要求1所述的一种用于风机叶片巡检的无人机载荷平台,其特征在于:所述三轴云台精准转动相机和三维激光雷达到目标位置,通过传感器感知无人机机身的姿态和运动趋势,驱动电机反向移动从而保持与地面的相对位置实现图像增稳。
5.根据权利要求1所述的一种用于风机叶片巡检的无人机载荷平台,其特征在于:所述嵌入式处理器是一款高性能低功耗四核应用处理器,搭载linux系统移植psdk框架实现对云台、相机、航线规划、消息订阅等模块的管理。
6.根据权利要求1所述的一种用于风机叶片巡检的无人机载荷平台,其特征在于:所述三维激光雷达具有远量程、高精度、宽视角、重量轻和高可靠性等特点,通过对采集的点云数据解算知悉当前航点无人机距离风机叶片的位置坐标信息。
7.根据权利要求1所述的一种用于风机叶片巡检的无人机载荷平台,其特征在于:所述可见光相机可以实现毫米级别精度的图像采集,同时实时推送视频流画面到遥控器界面供飞行人员巡检监测。
技术总结本发明涉及无人机载荷技术领域,尤其是一种用于风机叶片巡检的无人机载荷平台,包括嵌入式处理器、三维激光雷达、IMU模块、三轴云台和可见光相机,三轴云台通过SKYPORT V2转接环与无人机连接进行信息交互,本发明在风机叶片任意姿态下均可进行巡检任务,对风机实时三维建模并生成飞行航线提高了单架次叶片巡检效率,确保无人机在对应航点精准悬停,相对风机叶片距离为预设值,避免相对距离与悬停位置偏差出现空拍或未全面覆盖叶片表面的情况,添加精准拍照功能确保在航点时风机叶片始终在画幅中央,进一步保证了采集图像的质量同时避免空拍情况,为后期数据处理提供强可靠性。技术研发人员:呼卫军,陈康,刘嘉琪,香玫元,李浪,刘向臻,马泳潮受保护的技术使用者:西安因诺航空科技有限公司技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/221089.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表