一种机载吊舱的增稳方法与流程
- 国知局
- 2024-08-01 05:50:55
本申请涉及机载吊舱,尤其涉及一种机载吊舱的增稳方法。
背景技术:
1、随着无人机的广泛应用,机载吊舱的使用日渐频繁。机载吊舱常用结构为“两轴四框架”,虽然将增稳隔振与运动控制分开,有利于控制模块的解耦,但是结构上框架数量多,增大了吊舱的体积和质量,增强了载体的载荷负担,对载体的总航程具有不利影响。
2、因此,发明人提供了一种机载吊舱的增稳方法。
技术实现思路
1、(1)要解决的技术问题
2、本申请提供了一种机载吊舱的增稳方法,解决对机载吊舱的结构简化同时保证增稳功能的技术问题。
3、(2)技术方案
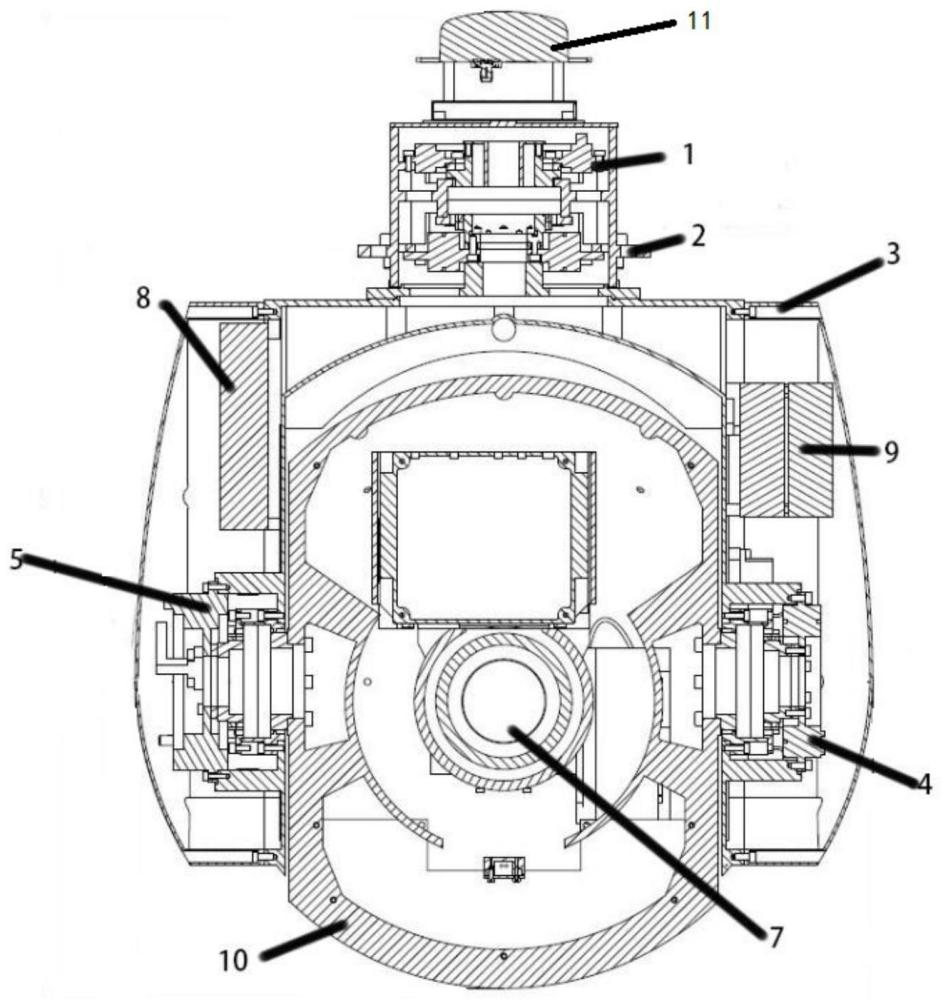
4、本申请提供了一种机载吊舱的增稳方法,应用于机载吊舱,所述机载吊舱包括连接轴、方位轴框架、俯仰轴框架、方位轴驱动组件、俯仰轴驱动组件、控制组件以及惯导装置;
5、所述方位轴框架转动连接于所述连接轴,所述俯仰轴框架转动连接于所述方位轴框架;
6、所述方位轴驱动组件安装于所述连接轴,所述俯仰轴驱动组件安装于所述方位轴框架,所述控制组件和所述惯导装置分别安装于所述俯仰轴框架;
7、所述控制组件分别与所述方位轴驱动组件、所述俯仰轴驱动组件以及所述惯导装置连接;
8、所述方位轴驱动组件的输出端与所述方位轴框架连接,用于驱动所述方位轴框架沿水平面旋转;所述俯仰轴驱动组件的输出端与所述俯仰轴框架连接,用于驱动所述俯仰轴框架沿竖直平面旋转;
9、所述增稳方法包括:
10、所述惯导装置测量所述增稳吊舱的三轴姿态信息,并将所述三轴姿态信息发送至所述控制组件;
11、所述控制组件根据所述三轴姿态信息控制所述方位轴驱动组件调整所述方位轴框架的速率,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的速率,以增强所述机载吊舱的平稳性。
12、进一步地,所述控制组件根据所述三轴姿态信息控制所述方位轴驱动组件调整所述方位轴框架的旋转速率,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的旋转速率,包括:
13、所述控制组件根据所述三轴姿态信息确定所述方位轴框架和所述俯仰轴框架的速率偏差;
14、所述控制组件根据所述速率偏差,控制所述方位轴驱动组件调整所述方位轴框架的速率,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的速率,以消除所述速率偏差。
15、进一步地,所述控制组件包括控制模块和驱动器;所述控制模块与所述惯导装置连接,所述驱动器的输入端与所述控制模块连接,输出端分别与所述方位轴驱动组件、所述俯仰轴驱动组件连接。
16、本申请还提供了一种机载吊舱的增稳方法,应用于机载吊舱,所述机载吊舱包括连接轴、方位轴框架、俯仰轴框架、方位轴驱动组件、俯仰轴驱动组件、控制组件以及视觉镜头;
17、所述方位轴框架转动连接于所述连接轴,所述俯仰轴框架转动连接于所述方位轴框架;
18、所述方位轴驱动组件安装于所述连接轴,所述俯仰轴驱动组件安装于所述方位轴框架,所述控制组件和所述视觉镜头分别安装于所述俯仰轴框架;
19、所述控制组件分别与所述方位轴驱动组件、所述俯仰轴驱动组件以及所述视觉镜头连接;
20、所述方位轴驱动组件的输出端与所述方位轴框架连接,用于驱动所述方位轴框架沿水平面旋转;所述俯仰轴驱动组件的输出端与所述俯仰轴框架连接,用于驱动所述俯仰轴框架沿竖直平面旋转;
21、所述增稳方法包括:
22、所述视觉镜头获取目标的脱靶量信息,并将所述脱靶量信息发送至所述控制组件;
23、所述控制组件根据所述脱靶量信息控制所述方位轴驱动组件调整所述方位轴框架的位置,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的位置,以增强所述机载吊舱的平稳性。
24、进一步地,所述控制组件根据所述脱靶量信息控制所述方位轴驱动组件调整所述方位轴框架的位置,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的位置,包括:
25、所述控制组件根据所述脱靶量信息确定所述方位轴框架和所述俯仰轴框架的位置偏差;
26、所述控制组件根据所述位置偏差,控制所述方位轴驱动组件调整所述方位轴框架的位置,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的位置,以消除所述位置偏差。
27、进一步地,所述控制组件包括控制模块和驱动器;所述控制模块与所述视觉镜头连接,所述驱动器的输入端与所述控制模块连接,输出端分别与所述方位轴驱动组件、所述俯仰轴驱动组件连接。
28、进一步地,所述方位轴框架为u型框架结构,所述俯仰轴框架为圆形框架结构;所述俯仰轴框架转动连接于所述方位轴框架的两翼。
29、进一步地,所述方位轴驱动组件包括方位轴旋变和方位轴电机;
30、所述方位轴旋变与所述控制模块连接,用于测量所述方位轴框架的角位置;
31、所述方位轴电机的输入端与所述驱动器连接,输出端与所述方位轴框架连接,用于受所述驱动器的控制而驱动所述方位轴框架沿水平面旋转。
32、进一步地,所述俯仰轴驱动组件包括俯仰轴旋变和俯仰轴电机;
33、所述俯仰轴旋变与所述控制模块连接,用于测量所述俯仰轴框架的角位置;
34、所述俯仰轴电机的输入端与所述驱动器连接,输出端与所述俯仰轴框架连接,用于受所述控制组件的控制而驱动所述俯仰轴框架沿竖直平面旋转。
35、进一步地,所述惯导装置包括三轴加速度计和三轴光纤陀螺仪。
36、(3)有益效果
37、本申请的上述技术方案具有如下优点:
38、本申请提供的机载吊舱的增稳方法,通过将方位轴框架转动连接于连接轴,俯仰轴框架转动连接于方位轴框架,机载吊舱只有两轴两框架,能够简化机载吊舱结构,降低机载吊舱整体质量,提高吊舱载体的整体航程。同时,控制组件可根据惯导装置测量的三轴姿态信息调控方位轴框架和俯仰轴框架的速率,或根据视觉镜头获取的脱靶量信息调控方位轴框架和俯仰轴框架的位置,实现了机载吊舱的增稳功能。
技术特征:1.一种机载吊舱的增稳方法,其特征在于,应用于机载吊舱,所述机载吊舱包括连接轴、方位轴框架、俯仰轴框架、方位轴驱动组件、俯仰轴驱动组件、控制组件以及惯导装置;
2.如权利要求1所述的机载吊舱的增稳方法,其特征在于,所述控制组件根据所述三轴姿态信息控制所述方位轴驱动组件调整所述方位轴框架的旋转速率,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的旋转速率,包括:
3.如权利要求1所述的机载吊舱的增稳方法,其特征在于,所述控制组件包括控制模块和驱动器;所述控制模块与所述惯导装置连接,所述驱动器的输入端与所述控制模块连接,输出端分别与所述方位轴驱动组件、所述俯仰轴驱动组件连接。
4.一种机载吊舱的增稳方法,其特征在于,应用于机载吊舱,所述机载吊舱包括连接轴、方位轴框架、俯仰轴框架、方位轴驱动组件、俯仰轴驱动组件、控制组件以及视觉镜头;
5.如权利要求4所述的机载吊舱的增稳方法,其特征在于,所述控制组件根据所述脱靶量信息控制所述方位轴驱动组件调整所述方位轴框架的位置,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的位置,包括:
6.如权利要求4所述的机载吊舱的增稳方法,其特征在于,所述控制组件包括控制模块和驱动器;所述控制模块与所述视觉镜头连接,所述驱动器的输入端与所述控制模块连接,输出端分别与所述方位轴驱动组件、所述俯仰轴驱动组件连接。
7.如权利要求1或4所述的机载吊舱的增稳方法,其特征在于,所述方位轴框架为u型框架结构,所述俯仰轴框架为圆形框架结构;所述俯仰轴框架转动连接于所述方位轴框架的两翼。
8.如权利要求3或6所述的机载吊舱的增稳方法,其特征在于,所述方位轴驱动组件包括方位轴旋变和方位轴电机;
9.如权利要求3或6所述的机载吊舱的增稳方法,其特征在于,所述俯仰轴驱动组件包括俯仰轴旋变和俯仰轴电机;
10.如权利要求1所述的机载吊舱的增稳方法,其特征在于,所述惯导装置包括三轴加速度计和三轴光纤陀螺仪。
技术总结本申请涉及一种机载吊舱的增稳方法,应用于机载吊舱,所述机载吊舱包括连接轴、方位轴框架、俯仰轴框架、方位轴驱动组件、俯仰轴驱动组件、控制组件以及惯导装置;所述增稳方法包括:所述惯导装置测量所述增稳吊舱的三轴姿态信息,并将所述三轴姿态信息发送至所述控制组件;所述控制组件根据所述三轴姿态信息控制所述方位轴驱动组件调整所述方位轴框架的速率,以及控制所述俯仰轴驱动组件调整所述俯仰轴框架的速率,以增强所述机载吊舱的平稳性。本申请能够在简化机载吊舱结构,降低机载吊舱整体质量,提高吊舱载体的整体航程的同时,实现机载吊舱的增稳功能。技术研发人员:王兴,刘鹏程,叶明,聂宜云,管桦,倪濛,安康康受保护的技术使用者:中国航空工业集团公司北京航空精密机械研究所技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/221691.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表