一种基于奇异吸引子的复杂巨型星座系统动态稳定性控制方法
- 国知局
- 2024-08-01 05:52:43
本发明属于航天工程和人工智能,尤其涉及一种基于奇异吸引子的复杂巨型星座系统动态稳定性控制方法。
背景技术:
1、巨型星座系统包括数百至数千颗卫星,它们通过高动态的通信网络相连,共同完成复杂的协同任务。这类系统展示出极高的任务复杂性、状态复杂性和行为复杂性,同时也面对着非线性相互作用和不确定性的问题。目前,巨型星座系统的稳定性控制主要依赖于传统的轨道控制技术和基础的通信协调机制。这些方法在小规模或低复杂度的星座系统中效是有效的,但并不适用大规模、高度动态的巨型星座系统。
2、现有技术方案在提高单个卫星的轨道精度和改善星间通信质量方面取得了一定进展。然而,它们在应对巨型星座系统内部的复杂动态行为及其与外部环境的交互时,存在以下技术性缺点:
3、·系统稳定性控制精度低:缺乏对系统内部复杂动态行为深入理解,难以有效应对非线性相互作用和不确定性带来的挑战,影响长期稳定性。
4、·自适应性和鲁棒性不足:在内部扰动和外部环境变化面前,现有方法缺乏有效的自适应调整机制,使得系统易受不稳定因素影响。
5、奇异吸引子是混沌理论中的概念,代表系统在复杂环境下自适应行为的稳定模式,为研究巨型星座复杂系统控制提供了新的研究视角。本课题旨在通过深入探究奇异吸引子在复杂系统中的作用,解决系统内部高度非线性交互而导致的预测与控制挑战。基础性问题包括:
6、奇异吸引子在巨型星座系统稳定性控制中的作用和机理,理解这一混沌理论概念如何影响复杂系统的行为;
7、高度不确定性和自组织能力下的系统行为预测方法,尤其是如何在存在混沌行为的条件下提高预测的准确性;
8、基于混沌理论和非线性动力学的稳定性控制策略,如何在不抑制系统自组织能力的前提下,有效控制系统的稳定性。
技术实现思路
1、针对现有技术中存在资源利用效率低、稳定性控制精度不足以及自适应性和鲁棒性不足的技术性缺点,本发明的目的在于克服上述现有技术缺陷,提出了一种基于奇异吸引子的复杂巨型星座系统动态稳定性控制方法,本方法适用于全球通信、环境监测、战略安全等领域的关键空间基础设施,涵盖了成千上万颗卫星组成的巨型星座系统。
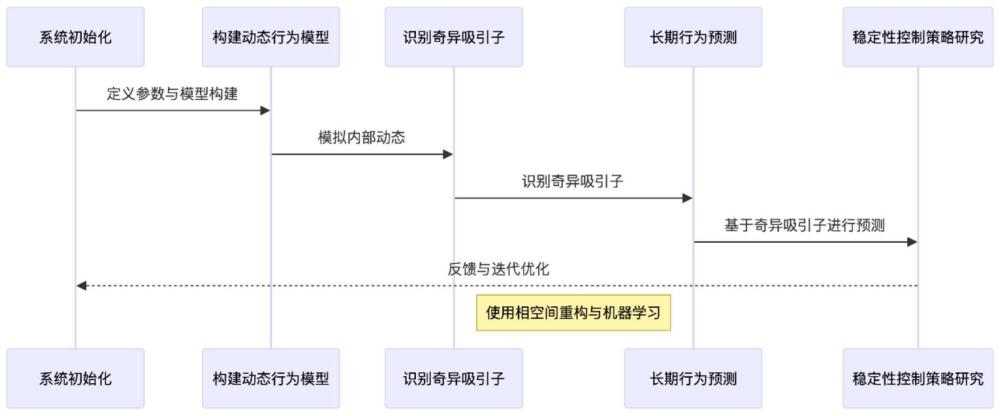
2、为了实现上述目的,本发明提出了一种基于奇异吸引子的复杂巨型星座系统动态稳定性控制方法,包括:
3、步骤1)基于高维张量和图论构建巨型星座系统内部动态行为模型;
4、步骤2)基于构建的动态行为模型,采用机器学习方法识别和分析巨型星座系统中的奇异吸引子,捕捉巨型星座系统内的复杂动态行为;
5、步骤3)根据识别的奇异吸引子,基于无监督学习,预测巨型星座系统内可能的行为模式和变化趋势;
6、步骤4)采用强化学习方法动态调整奇异吸引子轨迹,控制奇异吸引子轨迹从一种稳态向另一种稳态转变,并采用多智能体强化学习,将巨型星座系统中的每个卫星作为一个智能体,通过调整多智能体上的控制参数,控制奇异吸引子轨迹,完成对星座系统的控制,实现从一种稳态向另一种稳态的转变。
7、优选的,所述步骤1)包括:
8、步骤1-1)基于高维张量对巨型星座系统进行状态描述;
9、步骤1-2)采用图论和动态系统理论建立巨型星座系统内部动态行为模型。
10、优选的,所述步骤1-1)包括:
11、设置一个巨型星座系统包括n个卫星,定义高维张量其中每个维度in代表系统的一个特定方面,包括时间、空间位置、卫星功能和外部环境状态;张量的元素表示在给定的条件下的系统状态量,包括能量水平、数据传输速率和任务执行状态;
12、采用张量分解技术,将高维张量分解为多个核心张量和因子矩阵。
13、优选的,所述步骤1-2)包括:
14、定义图g=(v,e):其中v是节点集合,代表卫星,e是边集合,代表卫星之间的通信或功能链接;图的每个节点vi都与一个状态向量xi相关联,该状态向量包含了描述卫星当前状态的所有相关参数;
15、对于图中的每一个节点,其状态的时间演化通过下式表示:
16、
17、其中,f是状态转移函数,用于描述节点状态随时间的变化规律;ui是控制输入,用于反映外部控制策略的作用;xneighi是节点i所有邻居的状态集合,用于表示卫星间相互作用的影响。
18、优选的,所述步骤2)包括:
19、步骤2-1)将巨型星座系统作为一个动态系统,利用内部动态行为模型生成系统的状态时间序列,基于状态时间序列,进行相空间重构,采用机器学习方法识别奇异吸引子;
20、步骤2-2)对于奇异吸引子,进行稳定性评估、动态特性分析和行为引导影响分析。
21、优选的,所述步骤2-1)包括:
22、设x(t)表示时间t的系统状态向量,构造相空间重构向量为:
23、x(t)=[x(t),x(t+τ),…,x(t+(m-1)τ)]
24、其中,τ是时间延迟,m是嵌入维数,代表重构相空间的维度;
25、设xi是相空间中的点集,采用机器学习方法识别奇异吸引子:
26、labeli=f(xi;θ)
27、其中,θ表示机器学习模型的参数,labeli表示节点i的类别,用于区分不同的动态行为,包括奇异吸引子。
28、优选的,所述步骤2-2)包括:
29、定义在奇异吸引子附近的jacobian矩阵ja,如果具有负的最大实部特征值,则奇异吸引子具有稳定性;
30、通过分析奇异吸引子的几何结构和统计特性进行奇异吸引子的动态特性分析;
31、结合动态特性分析,进行行为引导影响分析。
32、优选的,所述步骤3)包括:
33、步骤3-1)采用transformer和其变体的模型,通过无监督学习与知识迁移技术,经过自适应微调策略和自循环训练,提高预测准确性;
34、步骤3-2)采用马尔可夫决策过程,应用深度强化学习算法,动态调整奇异吸引子轨迹;
35、步骤3-3)采用多智能体强化学习,将巨型星座系统中的每个卫星作为一个智能体,通过调整多智能体上的控制参数,控制奇异吸引子轨迹,完成对星座系统的控制,实现从一种稳态向另一种稳态的转变。
36、与现有技术相比,本发明的优势在于:
37、1、提高精度和效率:通过对巨型星座系统内部动态行为的深入理解,特别是奇异吸引子在系统稳定性中的作用,本发明能够更精确地预测和控制系统的动态行为,从而大幅提高任务完成的精度和系统运行的效率;
38、2、简化操作和控制:基于奇异吸引子的智能化控制策略简化了复杂系统的管理和控制过程,使操作更加直观和简便,降低了系统管理的复杂度和运行成本;
39、3、增强系统性能:引入奇异吸引子概念后,系统能够有效应对内部扰动和外部环境变化,显著提升系统的稳定性和适应性,使得系统在面对复杂多变的环境时仍能稳定运行;
40、4、本发明提供了有益效果的理论与数据支持。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221857.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种无人机飞行防撞装置
下一篇
返回列表