一种顶部吸振并使用无间隙铰链的空间盘绕式伸展臂
- 国知局
- 2024-08-01 05:53:03
本发明属于航天,尤其涉及一种顶部吸振并使用无间隙铰链的空间盘绕式伸展臂。
背景技术:
1、空间盘绕式伸展臂是一种一维柔性展开结构,具有压缩系数高、质量系数大等优势,可以用作航天器姿态控制的重力梯度稳定部件、载荷支撑平台等。为了适应卫星搭载探测仪器的需求,例如在搭载高精度光学探测器、高精度磁强计或高分辨率遥感相机等空间任务中,必须控制伸展臂的运动和振动在一个极小的范围内,这对于空间盘绕式伸展臂的刚度和稳定性提出了更高的需求。
2、现有技术中的空间盘绕式伸展臂结构由于其每层的纵杆连接件与横杆连接件需要能够相对转动以满足其折叠和展开时的运动需求,因此选用铰链结构,而铰链设计在组成转动副的两个零件之间存在间隙,当伸展臂在空间中展开后,受到外部载荷的激励时,间隙的存在使铰链部件发生接触、晃动,影响了伸展臂整体的刚度。由此,为了增强空间盘绕式伸展臂的刚度和稳定性,需要消除铰链部件的间隙。
3、同时,空间盘绕式伸展臂作为典型的空间柔性桁架结构,由于其大挠性和低频模态密集等特点,极易在航天器本体和外部载荷的激励下产生低频大幅度的挠性振动,此类振动难以在短时间内衰减,并且会对顶部高精度指向载荷造成不利影响。
技术实现思路
1、本发明实施例的目的在于提供一种顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,旨在解决上述背景技术中存在的问题。
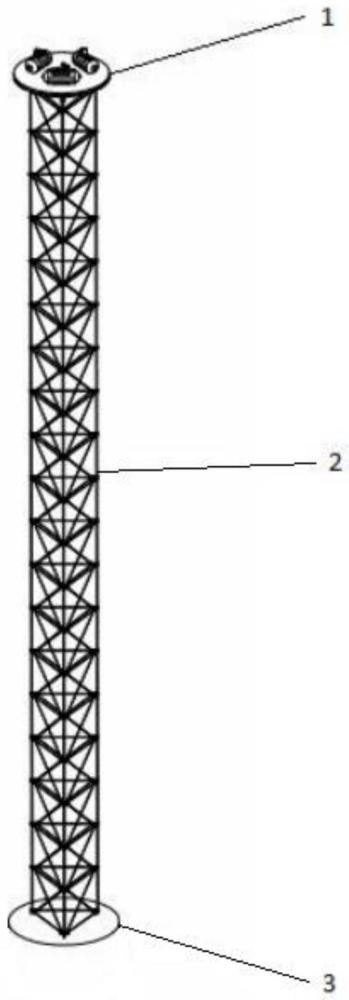
2、本发明实施例是这样实现的,一种顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,包括:
3、顶部平台和基座;
4、盘绕式伸展臂,安装在顶部平台和基座之间;
5、其中,所述顶部平台包括加速度传感器和电磁式主动动力吸振器,产生相对于基座的运动,用于施加弯曲和扭转力矩,补偿盘绕式伸展臂的动态变形运动;
6、所述盘绕式伸展臂包括无接触间隙铰链,用于消除铰链间隙。
7、优选地,所述盘绕式伸展臂包括:
8、三角形横架,所述三角形横架设有多层,每层三角形横架由三个横杆和三个无接触间隙铰链组成;
9、纵杆,所述纵杆设有三根,三角形横架通过无接触间隙铰链连接在纵杆上;
10、拉索,连接在相邻层的三角形横架上。
11、优选地,所述无接触间隙铰链包括:
12、v型连接件,所述v型连接件上开设有拉索连接孔,所述拉索穿过v型连接件进行连接;
13、纵杆连接件,与所述v型连接件相配合,与所述纵杆相连接;
14、轴承,安装在所述v型连接件中,与v型连接件轴向固定,固定螺钉穿过轴承与纵杆连接件螺纹配合,所述纵杆连接件和固定螺钉形成整体可相对v型连接件转动。
15、优选地,所述顶部平台包括:
16、顶盖;
17、电磁式主动动力吸振器,所述电磁式主动动力吸振器设有三个,呈等边三角形状安装在所述顶盖上,与所述三角形横架一致;
18、加速度传感器,所述加速度传感器设有三个,所述加速度传感器通过支架安装在所述电磁式主动动力吸振器上,用于测量顶部平台三个方向的振动幅度;
19、上顶盘,安装在所述顶盖上,所述盘绕式伸展臂与上顶盘相连接。
20、优选地,所述电磁式主动动力吸振器包括:
21、外壳;
22、线圈套筒,所述线圈套筒沿轴向安装在外壳内,所述线圈套筒中安装有线圈;
23、永磁体,所述永磁体沿轴向安装在外壳内,所述永磁体的两端分别通过膜片弹簧与外壳相连,所述永磁体与线圈内壁存在间隙。
24、本发明实施例提供的一种顶部吸振并使用无间隙铰链的空间盘绕式伸展臂可施加主动振动抑制,并消除铰链间隙,相比于现有的空间盘绕式伸展结构,极大地提高了展开后伸展臂的动态稳定性和整体刚度,有效提高了载荷的动态指向精度,易于实现,机构及其部件可靠性高,可以适配大量控制算法,结合各类硬件的应用,制造成本低,工程可行性高,具有较好的应用前景。
技术特征:1.一种顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,其特征在于,包括:
2.根据权利要求1所述的顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,其特征在于,所述盘绕式伸展臂(2)包括:
3.根据权利要求2所述的顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,其特征在于,所述无接触间隙铰链(24)包括:
4.根据权利要求2所述的顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,其特征在于,所述顶部平台(1)包括:
5.根据权利要求4所述的顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,其特征在于,所述电磁式主动动力吸振器(13)包括:
技术总结本发明适用于航天技术领域,提供了一种顶部吸振并使用无间隙铰链的空间盘绕式伸展臂,包括:顶部平台和基座;盘绕式伸展臂,安装在顶部平台和基座之间;其中,所述顶部平台包括加速度传感器和电磁式主动动力吸振器,产生相对于基座的运动,用于施加弯曲和扭转力矩,补偿盘绕式伸展臂的动态变形运动;所述盘绕式伸展臂包括无接触间隙铰链,用于消除铰链间隙。本发明可施加主动振动抑制,并消除铰链间隙,相比于现有的空间盘绕式伸展结构,极大地提高了展开后伸展臂的动态稳定性和整体刚度,有效提高了载荷的动态指向精度,易于实现,机构及其部件可靠性高,可以适配大量控制算法,结合各类硬件的应用,制造成本低,工程可行性高,具有较好的应用前景。技术研发人员:孙亮,刘家俊,赵旭瑞,赵泽林,刘宇,黄海,赵炜佳受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/221884.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表