一种具有仿生学出入水设计的两栖无人机
- 国知局
- 2024-08-01 05:58:52
本发明涉及无人机,特别是涉及一种具有仿生学出入水设计的两栖无人机。
背景技术:
1、无人机是指利用无线遥控技术控制运动的无人飞行器,微型无人机在城市治安、农业生产、航拍测绘以及国防军事等领域广泛应用。无人机通常只在空中飞行,难以满足水-空跨介质运动的要求。
2、如授权公告号为cn107380423b、授权公告日为2023.09.05的中国发明专利公开了一种水空两栖无人机,具体包括无人机机体,其上设有至少一个机臂、每个机臂的末端分别有驱动部件,驱动部件的上端安装有旋翼,驱动部件的下端安装有船用螺旋桨,旋翼与螺旋桨通过单向轴承或者单向离合器连接。当无人机在空中飞行时,驱动旋翼转动,实现无人机在空中正常飞行,并通过对旋翼的控制实现姿态调整;当无人机到水中时,旋翼不提供水下运动所需要的效率,不工作;加大船用螺旋桨的转速时,无人机向下运动到水下,再通过对无人机的姿态控制实现无人机的水下行驶。
3、现有水空两栖无人机的工作过程为:从空中进入水中,无人机先平稳降落并漂浮在水面,再切换至船用螺旋桨工作,实现入水及水下行驶。同理,从水中进入空中,无人机凭借浮力浮于水面上,再控制无人机的旋翼工作,使无人机飞离水面。
4、但是,现有水空两栖无人机进行跨介质运动时,需漂浮停留在水面上切换动力,入水和出水动作不连贯,水-空跨介质运动效率低。
技术实现思路
1、本发明要解决的技术问题是:现有水空两栖无人机进行跨介质运动时,需漂浮停留在水面上切换动力,入水和出水动作不连贯,水-空跨介质运动效率低的问题。
2、为了解决上述技术问题,本发明提供了一种具有仿生学出入水设计的两栖无人机:
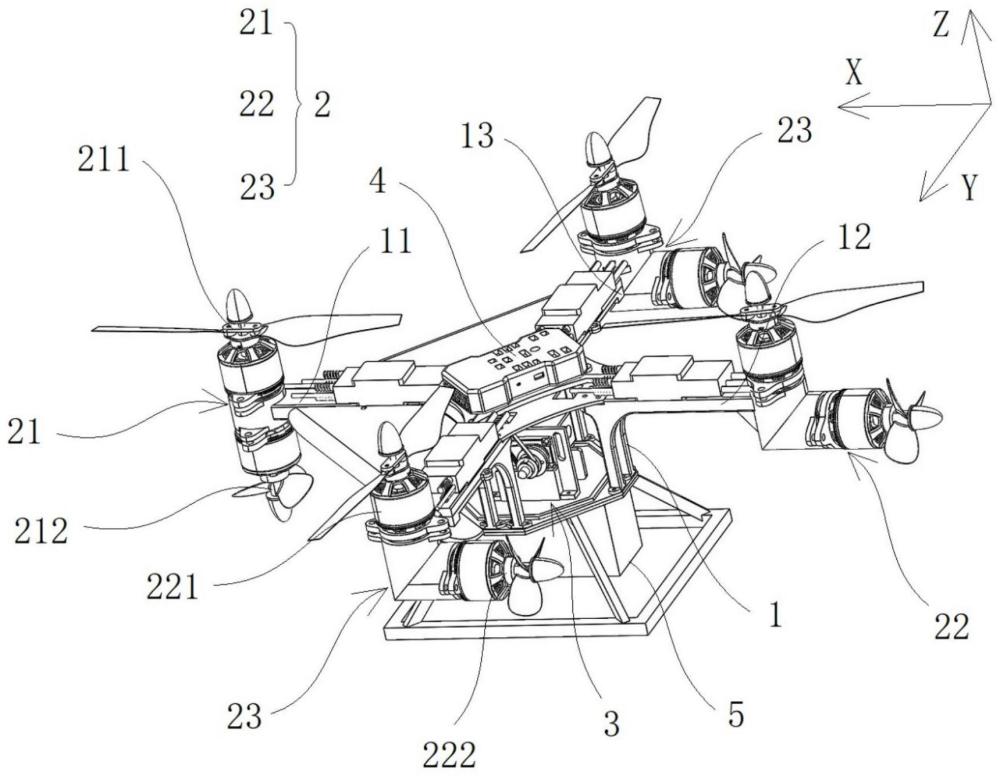
3、具有仿生学出入水设计的两栖无人机包括机架、四个动力组件、水下调整机构、控制系统和电源,所述机架具有x向、y向和z向,所述机架设有沿x向延伸的前机臂和后机臂,以及沿y向延伸的两个侧机臂;
4、四个所述动力组件为前部动力组件、后部动力组件和两个侧部动力组件,所述前部动力组件固定安装于所述前机臂的端部,所述后部动力组件固定安装于所述后机臂的端部,两个所述侧部动力组件转动安装于对应的所述侧机臂的端部;
5、所述前部动力组件包括第一旋翼机构和第一螺旋桨机构,所述第一旋翼机构和所述第一螺旋桨机构的轴线方向均沿z向布置;所述后部动力组件和两个侧部动力组件均包括第二旋翼机构和第二螺旋桨机构,所述第二旋翼机构的轴线方向与所述第二螺旋桨机构的轴线方向相交布置;
6、所述水下调整机构、所述控制系统和所述电源均安装于所述机架上,所述水下调整机构分别与两个所述侧部动力组件传动连接,以带动两个所述侧部动力组件绕y向调整角度,所述控制系统和所述电源分别与四个所述动力组件电连接。
7、进一步的,所述侧部动力组件的第二旋翼机构的轴线方向与所述侧部动力组件的第二螺旋桨机构的轴线方向垂直布置。
8、进一步的,两个所述侧机臂的端部均安装有转动座,所述转动座的形状为直角形,所述侧部动力组件的第二旋翼机构设置于所述转动座的一端,所述侧部动力组件的第二螺旋桨机构设置于所述转动座的另一端。
9、进一步的,所述侧机臂的内部开设有y向通孔,所述y向通孔中转动安装有传动轴,所述传动轴的一端与所述转动座固定连接;所述水下调整机构包括两个舵机,所述舵机与对应的所述传动轴的另一端止转连接。
10、进一步的,所述舵机的输出轴上安装有舵机盘,所述舵机盘背向所述舵机的一侧固定有阶梯轴,所述阶梯轴与所述传动轴之间皮带传动相连。
11、进一步的,所述后机臂的端部设置有固定座,所述固定座的形状为直角形,所述后部动力组件的第二旋翼机构安装于所述固定座的z向端部,所述后部动力组件的第二螺旋桨机构安装于所述固定座的x向端部。
12、进一步的,所述机架还安装有电调组件,所述电调组件分别与所述控制系统和四个所述动力组件电连接,所述电调组件用于接收所述控制系统发出的控制信号,并根据控制信号调节所述动力组件的转速。
13、进一步的,所述前机臂与两个所述侧机臂之间设置有上护板,所述前机臂与所述机架的下部之间设置有下护板,所述下护板的下表面为弧形曲面;机架的下部固定连接有外框架,所述电源安装于所述外框架的内部。
14、进一步的,所述控制系统包括任务分配模块、飞行控制器、水下运动控制器和切换开关,所述任务分配模块与所述切换开关电连接;
15、所述切换开关分别与所述飞行控制器、所述水下运动控制器电连接,所述飞行控制器用于控制旋翼机构工作,所述水下运动控制器用于控制螺旋桨机构和所述水下调整机构工作。
16、进一步的,所述机架上还安装有传感器组件,所述传感器组件用于实时检测两栖无人机的位置、姿态和所处水深,所述传感器组件与所述任务分配模块电连接,以根据位置信号、姿态信号和水深信号发出控制指令/模态切换指令;所述传感器组件与所述飞行控制器、所述水下运动控制器电连接,以根据位置信号和姿态信号控制四个所述动力组件工作。
17、本发明的一种具有仿生学出入水设计的两栖无人机与现有技术相比,其有益效果在于:该具有仿生学出入水设计的两栖无人机采用了机架、四个动力组件、水下调整机构、控制系统和电源的设计形式,机架设有沿x向延伸的前机臂和后机臂,以及沿y向延伸的两个侧机臂,前部动力组件固定于前机臂的端部,后部动力组件固定于后机臂的端部,两个侧部动力组件转动安装于对应的侧机臂的端部。利用四个动力组件关于机架呈前后左右分布,同步控制四个动力组件进行工作,可实现两栖无人机的空中悬停飞行和水下行驶的目的。
18、其中,前部动力组件包括第一旋翼机构和第一螺旋桨机构,第一旋翼机构的轴线方向沿z向布置;后部动力组件和两个侧部动力组件均包括第二旋翼机构和第二螺旋桨机构。前部动力组件的第一旋翼机构、后部动力组件的第二旋翼机构、两个侧部动力组件的第二旋翼机构用于产生空中飞行时的升力,两个侧部动力组件可绕y向调整角度,进而改变两个侧部动力组件的推力角度,从而能够灵活地调整无人机的飞行姿态。
19、相应的,前部动力组件的第一螺旋桨机构、后部动力组件的第二螺旋桨机构、两个侧部动力组件的第二螺旋桨机构用于产生水下行驶时的动力,第一螺旋桨机构的轴线方向沿z向布置,第一螺旋桨机构能够使机身在水下绕y向进行扭转动作。由于两个侧部动力组件的第二螺旋桨机构为矢量螺旋桨机构,可有效防止水下侧翻,克服了水下运动的不稳定性,通过水下调整机构能够带动两个侧部动力组件绕y向调整角度,使两个侧部动力组件的第二螺旋桨机构可产生x0z平面内的动力。
20、而且,当两个侧部动力组件的第二螺旋桨机构处于动力相反状态时,能够使机身在水下绕z向进行扭转动作;并且,还能带动机身从x0y平面90度翻转至xoz平面,然后再将两个侧部动力组件的第二螺旋桨机构调整至与第一螺旋桨机构的轴线方向一致,利用这三个螺旋桨机构可驱动无人机沿y向平动。因此,当两栖无人机处于水中时,利用四个动力组件的螺旋桨机构产生不同方向的动力,能够进行x向、y向、z向的平移运动,以及绕y向、z向的扭转动作,即实现了水中五个自由度的运动目的。
21、若无人机从空中进入水中时,先将机身由平飞调整至斜向下的飞行姿态,利用惯性以斜插方式进入水中,关闭旋翼机构同时启动螺旋桨机构,使无人机进入水下行驶状态。相应的,无人机从水中进入空中时,先将机身调整至斜向上的行驶姿态,利用后部动力组件的第二螺旋桨机构和两个侧部动力组件的第二螺旋桨机构产生水下推力,使无人机以蝠鲼出水的方式飞出水面,在飞出水面的滞空时间内切换动力模式,关闭螺旋桨机构同时启动旋翼机构,使无人机进入空中飞行状态。相比于现有无人机需漂浮停留在水面上切换动力,采用仿生学的出入水设计,入水和出水动作更加连贯,水-空跨介质运动效率高。
22、另外,若无人机漂浮在水面需要潜入水中时,先利用前部动力组件的第一螺旋桨机构对无人机产生头部抬起的动力,确保机身的后半部向下进入水中,启动另外三个动力组件的第二螺旋桨机构产生斜向上的水下推力,使机身短暂地加速上窜离开水面,滞空后具有一个初速度,由于无人机的中心布置在前部,在惯性和重力作用下最终以斜向下的方式钻入水中,实现了无人机以抛物线形式下潜运动的目的。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222243.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表