一种仅使用磁力矩器控制的高精度卫星姿态控制方法与流程
- 国知局
- 2024-08-01 06:00:52
本发明涉及航天器姿态控制领域,特别是一种仅使用磁力矩器控制的高精度卫星姿态控制方法。
背景技术:
1、磁力矩器是低轨道航天器经常使用的一种姿态控制执行机构,具有高可靠性和成本低廉的优点,可用于卫星磁姿态捕获、动量轮等动量交换机构的角动量卸载等功能。在动量轮或推力器等其他执行机构故障卫星无法正常姿态控制的情况下,或出于低功耗需求或低成本需求不使用或不配置其他执行机构的情况下,仅使用磁力矩器进行卫星高精度姿态控制能够极大提高卫星运行可靠性,延长卫星使用寿命。但受限于磁力矩器的工作原理,产生的工作磁矩需与地磁场相互作用形成磁控力矩,其方向与地磁场方向相互垂直,在地磁场方向上无法进行控制,因此仅使用磁力矩器进行卫星三轴姿态控制具有较高的难度,现有技术难以实现高精度的姿态控制。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种仅使用磁力矩器控制的高精度卫星姿态控制方法,避免了反馈控制的低效和力矩前馈方法的间接损失,有效提高了卫星姿态控制精度。
2、本发明的技术解决方案是:一种仅使用磁力矩器控制的高精度卫星姿态控制方法,包括:
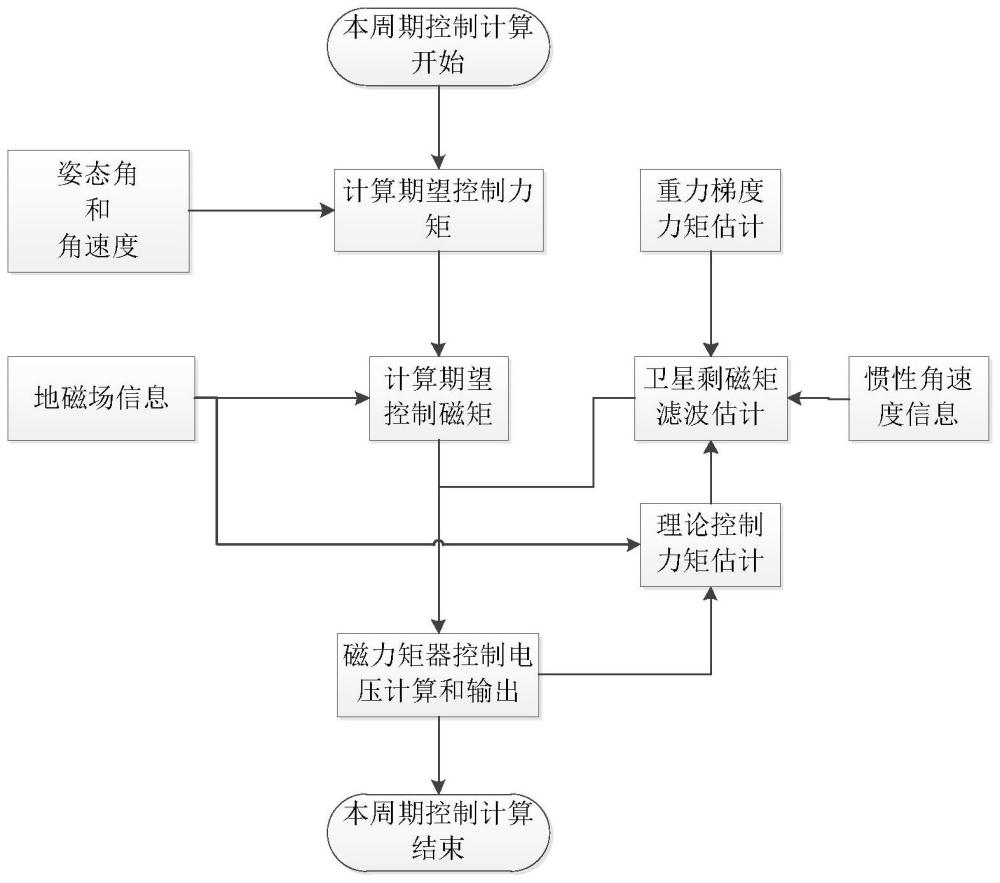
3、根据卫星当前姿态角φ和姿态角速度计算期望控制力矩tex;
4、根据地磁场信息b和期望控制力矩tex计算期望控制磁矩mex;
5、根据惯性角速度信息ω结合重力梯度力矩估计tg和上周期理论控制力矩估计tc,对卫星剩磁矩mrem进行滤波估计;
6、将期望控制磁矩mex扣除估计的剩磁矩mrem并转换为磁力矩器控制电压vc进行输出,进而实现仅使用磁力矩器对卫星姿态的控制。
7、优选的,对卫星剩磁矩mrem进行滤波估计包括:
8、计算重力梯度力矩tg;
9、根据计算的重力梯度力矩tg、上周期计算的理论控制力矩估计tc以及本周期值和上周期卫星本体相对于惯性系的三轴角速度值ω、ωlst计算剩磁力矩估计trem;
10、计算卫星剩磁矩的滤波更新值:
11、mrem=mremlst+kmrem((mremlst×bv)×bv-(trem×bv)/|b|),
12、其中mremlst是卫星剩磁矩的上周期计算值,kmrem是滤波系数值;bv为磁场方向矢量,b为地磁场矢量在卫星本体坐标系的三轴分量表示。
13、优选的,所述重力梯度力矩tg=3ω02(e×je)
14、其中,ω0为卫星轨道角速度值,j为3*3维的卫星惯量矩阵值,e为卫星本体系相对于轨道系的转换矩阵abo的第3列向量。
15、优选的,剩磁力矩估计trem=(jω-jωlst)/δt-tg-tc
16、其中,δt为周期时长,j为3*3维的卫星惯量矩阵值。
17、优选的,滤波系数值kmrem的确定原则是在降低滤波噪声与提高滤波跟踪速度之间进行权衡,建议取值范围在0.001~0.01之间。
18、优选的,所述磁力矩器控制电压vc计算如下:
19、计算理论控制磁矩mc=mex-mrem;
20、转换为磁力矩器控制电压vc=kvmmc,其中kvm为磁矩-电压转换系数。
21、优选的,利用计算的理论控制磁矩mc更新用于下周期计算的理论控制力矩估计tc=mc×b,其中,b为地磁场矢量在卫星本体坐标系的三轴分量表示。
22、优选的,所述期望控制力矩计算如下:其中kp和kd均为3*3维的控制系数,φ和分别为三轴欧拉姿态角和三轴欧拉姿态角速度,其中控制系数kp和kd应保证闭环控制稳定性。
23、优选的,所述期望控制磁矩计算包括:
24、计算磁场方向矢量bv=b/|b|,其中b=[bx by bz]t为地磁场矢量在卫星本体坐标系的三轴分量表示,|·|表示对矢量计算矢量长度;
25、计算期望控制磁矩mex=tex×bv,其中×表示矢量叉乘计算。
26、本发明与现有技术相比的优点在于:
27、本发明不同于以往单纯进行反馈控制设计的思路,通过对卫星剩磁矩滤波估计和直接补偿,结合反馈控制律,是一种新颖的反馈控制与输出前馈补偿结合的设计方法,将剩磁矩转化为控制磁矩的一部分,避免了反馈控制的低效和力矩前馈方法的间接损失,有效提高了卫星姿态控制精度。
28、本发明仅使用磁力矩器进行高精度卫星姿态控制,在动量轮或推力器等其他执行机构故障无法使用时,或出于低功耗需求或低成本需求不使用或不配置其他执行机构的情况下,仍可实现高精度卫星姿态控制,极大提高卫星运行可靠性,延长卫星使用寿命。
技术特征:1.一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于包括:
2.根据权利要求1所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:对卫星剩磁矩mrem进行滤波估计包括:
3.根据权利要求2所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:所述重力梯度力矩tg=3ω02(e×je)
4.根据权利要求2所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:剩磁力矩估计trem=(jω-jωlst)/δt-tg-tc
5.根据权利要求2所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:滤波系数值kmrem的确定原则是在降低滤波噪声与提高滤波跟踪速度之间进行权衡,建议取值范围在0.001~0.01之间。
6.根据权利要求1所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:所述磁力矩器控制电压vc计算如下:
7.根据权利要求6所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:利用计算的理论控制磁矩mc更新用于下周期计算的理论控制力矩估计tc=mc×b,其中,b为地磁场矢量在卫星本体坐标系的三轴分量表示。
8.根据权利要求1所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:所述期望控制力矩计算如下:其中kp和kd均为3*3维的控制系数,φ和分别为三轴欧拉姿态角和三轴欧拉姿态角速度。
9.根据权利要求1所述的一种仅使用磁力矩器控制的高精度卫星姿态控制方法,其特征在于:所述期望控制磁矩计算包括:
技术总结一种仅使用磁力矩器控制的高精度卫星姿态控制方法,首先根据姿态角和姿态角速度计算期望控制力矩,再根据地磁场信息和期望控制力矩计算期望控制磁矩,然后根据惯性角速度信息结合重力梯度力矩估计和上周期理论控制力矩估计,使用本发明提供的公式对卫星剩磁矩进行滤波估计,最后将期望控制磁矩扣除估计的剩磁矩并转换为磁力矩器控制电压进行输出。技术研发人员:刘其睿,王丽娇,刘一武,关彬,李轶,林琳,李艳受保护的技术使用者:北京控制工程研究所技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/222419.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表