一种适用于飞机进气道及发动机叶片检测的特种机器人的制作方法
- 国知局
- 2024-08-01 06:02:33
本发明涉及检测机器人,更具体的说涉及一种适用于飞机进气道及发动机叶片检测的特种机器人。
背景技术:
1、喷气式飞机不同于民用飞机的涡扇发动机直接悬挂于机翼上,喷气式飞机发动机需要更高的飞行性能,因此,其发动机布置于机体后部,并由贯穿整个飞机的进气道结构为发动机提供助燃空气。
2、飞机发动机在机体总装过程中由吊装方式完成安装,发动机与进气道末端会存在对合误差间隙,此间隙作为评判发动机安装质量的直接凭证,往往需要检测人员爬入狭窄的进气道抵达发动机与进气道末端并凭借卡尺等工具对对合处进行间隙测量,不适的身体姿态以及昏暗的环境往往会导致检测人员获取间隙数据的准确性。另外,喷气式飞机在完成飞行任务后,需要人员对飞机进气道以及发动机叶片进行缺陷检查,以防异物对飞机造成损坏并危及下次飞行安全。人员进入飞机进气道执行任务十分艰苦(如飞行任务紧,进气道内温度未冷却下来即派人执行检查任务),因此检测结果经常受限于人员技能水平差异及进气道内环境影响。
3、公开号为cn113510747a的专利公开了一种航空发动机叶片原位检测机器人及其运动方法,检测机器人包括3个弯曲可控的绳驱动连续体机器人。其中一个绳驱动连续体机器人为介入连续体机器人,用于安全、快速地通过狭窄细长的多级叶片环境;余下两个检测机器人则为安装在介入连续体机器人末端的两个柔性操作臂,通过两个柔性操作臂间的相互协调运动,实现对叶片缺陷的全方位精确检测。
4、对比文件中的机器人为绳驱动结构的连续体机器人,无法做到小型化,尺寸过大导致无法进入飞机进气道。
技术实现思路
1、为了解决以上现有技术存在的问题和不足,本发明提出一种适用于飞机进气道及发动机叶片检测的特种机器人,特种机器人代替人工进入喷气式飞机进气道并对进气道以及发动机叶片完成检测,该特种机器人完全满足于:飞机进气道内的曲面行走、进气道及发动机叶片全区域的视觉检测、发动机与进气道末端对合间隙的测量功能。
2、为了实现上述发明目的,本发明的技术方案如下:
3、一种适用于飞机进气道及发动机叶片检测的特种机器人,包括:
4、行走机构,用于沿发动机进气道内壁移动;
5、位姿调整机构,设置在行走机构上,用于调整视觉及检测测量单元在进气道内的位姿;
6、视觉及检测测量单元,设置在位姿调整机构上,用于实现进气道和发动机叶片的视觉检测,以及发动机与进气道末端对合间隙的测量;
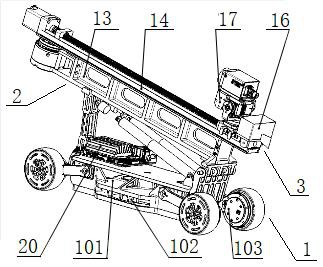
7、所述行走机构包括车盘底架以及设置在车盘底架上的负压吸附组件和浮动式轮毂电机车轮组件,所述负压吸附组件位于车盘底架下方的吸气口处,包括无刷电机、涡轮叶片、橡胶圈和封盖,所述无刷电机安装在车盘底架上,涡轮叶片与无刷电机的输出端连接,所述橡胶圈和封盖分别设置在进气口处,封盖将涡轮叶片的进气区域和甩气区域分割开来。
8、作为优选地,所述浮动式轮毂电机车轮组件包括车轮、第一伺服减速电机、车轮支臂和第一总线舵机,所述第一总线舵机固定在车盘底架上,车轮支臂与第一总线舵机的输出轴连接,所述第一伺服减速电机固定在车轮支臂上,电机的输出法兰与车轮连接。
9、作为优选地,所述位姿调整机构包括第一轴抬升臂、第二轴旋转臂、电动推杆和第二伺服减速电机,所述第一轴抬升臂的一端通过旋转支座与车盘底架固定连接,另一端与固定在车盘底架上的电动推杆连接,所述第二伺服减速电机固定在第一轴抬升臂上,电机的输出轴与第二轴旋转臂连接。
10、作为优选地,所述视觉及检测测量单元包括设置在第二轴旋转臂上的线激光传感器和相机云台组件。
11、作为优选地,所述第二轴旋转臂上设置有直线模组,所述相机云台组件位于直线模组的滑块上。
12、作为优选地,所述相机云台组件包括第二减速步进电机、齿轮组、第二总线舵机以及相机,所述第二减速步进电机固定在直线模组的滑块上,齿轮组与第二减速步进电机的输出轴连接,所述第二总线舵机通过第五轴连接板与齿轮组连接,所述相机通过相机支座固定在第二总线舵机上。
13、作为优选地,所述车盘底架上还设置有用于支撑第一轴抬升臂的支撑杆。
14、作为优选地,所述第一总线舵机通过usb转ttl模块与usb集线器连接,usb集线器与上位机通信连接。
15、作为优选地,所述第二总线舵机通过usb转ttl模块与usb集线器连接,usb集线器与上位机通信连接。
16、作为优选地,所述第一伺服减速电机通过ttl转485模块与usb转ttl模块连接,usb转ttl模块又通过usb集线器与上位机通信连接。
17、作为优选地,所述第二伺服减速电机通过ttl转485模块与usb转ttl模块连接,usb转ttl模块又通过usb集线器与上位机通信连接。
18、作为优选地,所述无刷电机通过电子调速器与arduino连接,arduino通过usb转ttl模块连接,所述usb转ttl模块又通过usb集线器与上位机通信连接。
19、作为优选地,所述电动推杆通过电机驱动模块与arduino连接,arduino通过usb转ttl模块连接,所述usb转ttl模块又通过usb集线器与上位机通信连接。
20、作为优选地,所述线激光传感器通过usb集线器与上位机通信连接。
21、作为优选地,所述相机通过usb集线器与上位机通信连接。
22、本发明的有益效果:
23、1、本发明的特种机器人可基于其浮动式车轮在保证自身姿态的前提下稳定通过飞机进气道崎岖区域;进一步地,采用五轴串联机构作为相机的拍摄用机械臂,五自由度视觉及检测单元可实现对发动机进气叶片100%正面区域的观测以及60s可检测发动机安装接缝一圈,并获得10组接缝处点云数据,通过后续算法,接缝检测精度达到了±0.3mm。
24、2、本发明设计了与车体结构相结合的负压吸附功能组件,充分利用机器人车体空间,既保证了机器人姿态稳定,并且相比于使用真空泵加吸盘,本发明结构更紧凑,控制更简单。
25、3、本发明设计了一套控制系统,对多种通讯协议进行统一转换,并通过不同命令和校验实现多种通讯协议下的硬件控制。实现了“总线”控制,极大简化了上下位机之间的通讯布线。
技术特征:1.一种适用于飞机进气道及发动机叶片检测的特种机器人,包括:
2.根据权利要求1所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述浮动式轮毂电机车轮组件包括车轮、第一伺服减速电机、车轮支臂和第一总线舵机,所述第一总线舵机固定在车盘底架上,车轮支臂与第一总线舵机的输出轴连接,所述第一伺服减速电机固定在车轮支臂上,电机的输出法兰与车轮连接。
3.根据权利要求1所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述位姿调整机构包括第一轴抬升臂、第二轴旋转臂、电动推杆和第二伺服减速电机,所述第一轴抬升臂的一端通过旋转支座与车盘底架固定连接,另一端与固定在车盘底架上的电动推杆连接,所述第二伺服减速电机固定在第一轴抬升臂上,电机的输出轴与第二轴旋转臂连接。
4.根据权利要求3所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述视觉及检测测量单元包括设置在第二轴旋转臂上的线激光传感器和相机云台组件。
5.根据权利要求4所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述第二轴旋转臂上设置有直线模组,所述相机云台组件位于直线模组的滑块上。
6.根据权利要求5所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述相机云台组件包括第二减速步进电机、齿轮组、第二总线舵机以及相机,所述第二减速步进电机固定在直线模组的滑块上,齿轮组与第二减速步进电机的输出轴连接,所述第二总线舵机通过第五轴连接板与齿轮组连接,所述相机通过相机支座固定在第二总线舵机上。
7.根据权利要求3所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述车盘底架上还设置有用于支撑第一轴抬升臂的支撑杆。
8.根据权利要求2所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述第一总线舵机通过usb转ttl模块与usb集线器连接,usb集线器与上位机通信连接。
9.根据权利要求6所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述第二总线舵机通过usb转ttl模块与usb集线器连接,usb集线器与上位机通信连接。
10.根据权利要求2所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述第一伺服减速电机通过ttl转485模块与usb转ttl模块连接,usb转ttl模块又通过usb集线器与上位机通信连接。
11.根据权利要求3所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述第二伺服减速电机通过ttl转485模块与usb转ttl模块连接,usb转ttl模块又通过usb集线器与上位机通信连接。
12.根据权利要求1所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述无刷电机通过电子调速器与arduino连接,arduino通过usb转ttl模块连接,所述usb转ttl模块又通过usb集线器与上位机通信连接。
13.根据权利要求3所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述电动推杆通过电机驱动模块与arduino连接,arduino通过usb转ttl模块连接,所述usb转ttl模块又通过usb集线器与上位机通信连接。
14.根据权利要求4所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述线激光传感器通过usb集线器与上位机通信连接。
15.根据权利要求6所述的一种适用于飞机进气道及发动机叶片检测的特种机器人,其特征在于,所述相机通过usb集线器与上位机通信连接。
技术总结本发明涉及检测机器人技术领域,公开了一种适用于飞机进气道及发动机叶片检测的特种机器人,包括用于沿发动机进气道内壁移动的行走机构,设置在行走机构上用于调整视觉及检测测量单元在进气道内位置的位姿调整机构,以及设置在位姿调整机构上用于实现进气道和发动机叶片的视觉检测、发动机与进气道末端对合间隙的测量的视觉及检测测量单元。本发明的特种机器人能够代替人工进入喷气式飞机进气道并对进气道以及发动机叶片完成检测,并且该特种机器人完全满足于:飞机进气道内的曲面行走、进气道及发动机叶片全区域的视觉检测、发动机与进气道末端对合间隙的测量功能。技术研发人员:李本军,王志乾,雷沛,陈强,毕修文,周明刚,祝锦松,云鑫受保护的技术使用者:成都飞机工业(集团)有限责任公司技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/222544.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表